 25.08.05
25.08.05Nutitelefonidest teadusinstrumentideni on pildisensorid tänapäeva visuaaltehnoloogia keskmes. Nende hulgas on CMOS-sensoritest saanud domineeriv jõud, mis annab jõudu kõigele alates igapäevastest fotodest kuni täiustatud mikroskoopia ja pooljuhtide kontrollimiseni.
Komplementaarse metall-oksiid-pooljuhtide (CMOS) tehnoloogia on elektrooniline arhitektuur ja tootmisprotsesside tehnoloogiate kogum, mille rakendused on uskumatult laiad. Võib tõepoolest öelda, et CMOS-tehnoloogia on tänapäevase digitaalajastu alus.
Mis on CMOS-andur?
CMOS-pildisensorid (CIS) kasutavad aktiivseid piksleid, mis tähendab kolme või enama transistori kasutamist kaamera igas pikslis. CCD- ja EMCCD-pikslid ei sisalda transistore.
Iga piksli transistorid võimaldavad neid „aktiivseid” piksleid juhtida, signaale „väljatransistoride” abil võimendada ja nende andmetele juurde pääseda, kõik paralleelselt. Ühe lugemistee asemel kogu anduri või anduri olulise osa jaoks on vajaCMOS-kaamerasisaldab vähemalt ühte tervet rida lugemis-ADC-sid, ühte (või mitut) ADC-d iga anduri veeru kohta. Igaüks neist saab oma veeru väärtust samaaegselt lugeda. Lisaks on need „aktiivse piksliga” andurid ühilduvad CMOS-digitaalloogikaga, suurendades anduri potentsiaalset funktsionaalsust.
Need omadused annavad CMOS-sensoritele kiiruse. Tänu paralleelsuse suurenemisele suudavad üksikud analoog-digimuundurid (ADC-d) aga oma tuvastatud signaalide täpsemaks mõõtmiseks kauem aega võtta. Pikemad teisendusajad võimaldavad väga madalat mürataset isegi suurema pikslite arvu korral. Tänu sellele ja teistele uuendustele on CMOS-sensorite lugemismüra tavaliselt 5–10 korda madalam kui CCD-sensoritel.
Kaasaegsed teaduslikud CMOS-kaamerad (sCMOS-kaamerad) on CMOS-kaamerate spetsiaalne alatüüp, mis on loodud madala müratasemega ja kiire pildistamise jaoks uurimisrakendustes.
Kuidas CMOS-andurid töötavad? (Sealhulgas rulluv ja globaalne katik)
Tüüpilise CMOS-sensori tööpõhimõtet on näidatud joonisel ja kirjeldatud allpool. Pange tähele, et allpool toodud tööpõhimõtteliste erinevuste tõttu erinevad särituse ajastus ja toimimine globaalse ja rullkatikuga CMOS-kaamerate puhul.
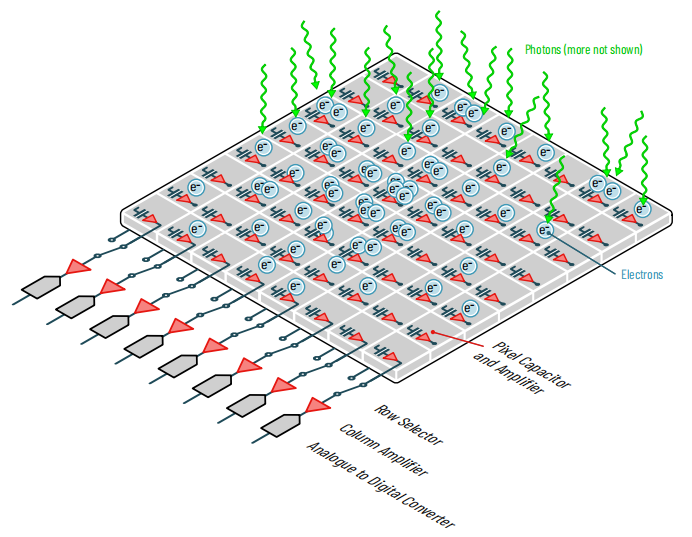
Joonis: CMOS-sensori andmete lugemise protsess
MÄRKUSCMOS-kaamerate andmete lugemisprotsess erineb „rulluva katiku” ja „globaalse katiku” kaamerate puhul, nagu tekstis käsitletud. Mõlemal juhul sisaldab iga piksel kondensaatorit ja võimendit, mis tekitavad tuvastatud fotoelektronide arvu põhjal pinge. Iga rea puhul mõõdetakse iga veeru pingeid samaaegselt analoog-digitaalmuunduritega.
Rulluv katik
1. Rulluva katikuga CMOS-sensori puhul alustades ülemisest reast (või jagatud sensoriga kaamerate puhul keskelt) tühjendage rea laeng, et alustada selle rea säritust.
2. Pärast „jooneaja” möödumist (tavaliselt 5–20 μs) liikuge järgmise rea juurde ja korrake 1. sammu, kuni kogu andur on säritatud.
3. Iga rea jaoks kogunevad särituse ajal laengud, kuni rea säriaeg on lõppenud. Esimesena alustanud rida lõpetab esimesena.
4. Kui rea säritus on lõppenud, kandke laengud üle näidukondensaatorile ja võimendile.
5. Seejärel ühendatakse iga võimendi pinge selles reas veeru ADC-ga ja mõõdetakse signaali iga rea piksli kohta.
6. Näidu ja lähtestamise toiming võtab aega „reaaja“, mille järel on järgmine särituse alustamiseks vajalik rida jõudnud oma särituseaja lõppu ja protsess kordub alates 4. sammust.
7. Niipea kui ülemise rea lugemine on lõppenud ja eeldusel, et alumine rida on alustanud praeguse kaadri säritamist, võib ülemine rida alustada järgmise kaadri säritamist (kattuvuse režiim). Kui säriaeg on lühem kui kaadri aeg, peab ülemine rida ootama alumise rea särituse alustamist. Lühim võimalik säritus on tavaliselt ühe rea aeg.
Tucseni FL 26BW jahutatud CMOS-kaamera, millel on Sony IMX533 sensor, kasutab seda rullkatiku tehnoloogiat.
Globaalne katik
1. Andmete omandamise alustamiseks tühjendatakse samaaegselt kogu sensorist laeng (piksliaugu globaalne lähtestamine).
2. Laeng akumuleerub särituse ajal.
3. Särituse lõpus viiakse kogutud laengud iga piksli sees olevasse maskeeritud süvendisse, kus need saavad oodata lugemist ilma uusi tuvastatud footoneid loendamata. Mõned kaamerad liigutavad selles etapis laenguid piksli kondensaatorisse.
4. Kui tuvastatud laengud on iga piksli maskeeritud alale salvestatud, saab piksli aktiivsest alast alustada järgmise kaadri säritust (kattuvuse režiim).
5. Maskeeritud alalt andmete lugemine toimub samamoodi nagu rull-katiku andurite puhul: anduri ülaosast alates kantakse laengud maskeeritud süvendist lugemiskondensaatorisse ja võimendisse, üks rida korraga.
6. Selle rea iga võimendi pinge ühendatakse veeru ADC-ga ja signaal mõõdetakse rea iga piksli kohta.
7. Näidu ja lähtestamise toiming võtab aega rea aega, mille järel protsess kordub 5. etapi järgmise rea jaoks.
8. Kui kõik read on loetud, on kaamera valmis järgmist kaadrit lugema ja protsessi saab korrata alates 2. etapist või 3. etapist, kui säriaeg on juba möödunud.
Tucseni Libra 3412M Mono sCMOS-kaamerakasutab globaalset katikutehnoloogiat, mis võimaldab liikuvate proovide selget ja kiiret jäädvustamist.
CMOS-andurite plussid ja miinused
Plussid
● Suuremad kiirusedCMOS-sensorite andmeedastuskiirus on tavaliselt 1–2 suurusjärku suurem kui CCD- või EMCCD-sensoritel.
● Suuremad anduridKiirem andmeedastus võimaldab suuremat pikslite arvu ja laiemat vaatevälja, kuni kümneid või sadu megapiksleid.
● Madal mürataseMõnedel CMOS-sensoritel võib olla lugemismüra kuni 0,25e⁻, mis konkureerib EMCCD-dega ilma laengu korrutamiseta, mis lisaks täiendavaid müraallikaid.
● Piksli suuruse paindlikkusTarbija- ja nutitelefonikaamerate sensorid vähendavad pikslite suurust ~1 μm vahemikku ning teaduskaamerad, mille pikslite suurus on kuni 11 μm, on levinud ja saadaval on ka kuni 16 μm piksleid.
● Väiksem energiatarveCMOS-kaamerate väike energiatarve võimaldab neid kasutada laiemas valikus teaduslikes ja tööstuslikes rakendustes.
● Hind ja eluigaOdavamad CMOS-kaamerad on tavaliselt CCD-kaameratega sarnase või odavamad ning tipptasemel CMOS-kaamerad on EMCCD-kaameratega võrreldes palju odavamad. Nende eeldatav kasutusiga peaks EMCCD-kaamera omast tunduvalt pikem olema.
Miinused
● RulluksEnamikul teaduslikel CMOS-kaameratel on rullkatik, mis võib eksperimentaalseid töövooge keerukamaks muuta või mõned rakendused välistada.
● Kõrgem tume current: Enamikul CMOS-kaameratel on palju suurem tumevool kui CCD- ja EMCCD-sensoritel, mis võib pikkade säriaegade (> 1 sekund) korral põhjustada märkimisväärset müra.
Kus CMOS-andureid tänapäeval kasutatakse
Tänu oma mitmekülgsusele leidub CMOS-andureid paljudes rakendustes:
● TarbeelektroonikaNutitelefonid, veebikaamerad, peegelkaamerad, action-kaamerad.
● EluteadusedCMOS-andurite võimsusmikroskoopiakaameradKasutatakse fluorestsentskuvamises ja meditsiinilises diagnostikas.

● AstronoomiaTeleskoobid ja kosmosepildistamisseadmed kasutavad kõrge eraldusvõime ja madala mürataseme saavutamiseks sageli teaduslikku CMOS-i (sCMOS).
● Tööstuslik kontrollAutomatiseeritud optiline kontroll (AOI), robootika jakaamerad pooljuhtide kontrollimiseksKiiruse ja täpsuse tagamiseks tuginege CMOS-anduritele.

● AutotööstusTäiustatud juhiabisüsteemid (ADAS), tahavaate- ja parkimiskaamerad.
● Jälgimine ja turvalisusHämaras ja liikumistuvastussüsteemid.
Nende kiirus ja kulutõhusus teevad CMOS-ist parima lahenduse nii suuremahuliseks äriliseks kasutamiseks kui ka spetsialiseeritud teadustööks.
Miks CMOS on nüüd moodne standard
Üleminek CCD-lt CMOS-ile ei toimunud üleöö, kuid see oli vältimatu. Siin on põhjused, miks CMOS on nüüd pilditööstuse nurgakivi:
● Tootmise eelisEhitatud standardsetele pooljuhtide tootmisliinidele, vähendades kulusid ja parandades skaleeritavust.
● Jõudluse kasvPöörleva ja globaalse katiku valikud, täiustatud hämaras tundlikkus ja kõrgem kaadrisagedus.
● Integratsioon ja intelligentsusCMOS-andurid toetavad nüüd kiibil tehisintellekti töötlemist, servandmetöötlust ja reaalajas analüüsi.
● InnovatsioonCMOS-platvormidele ehitatakse uusi sensoritüüpe, näiteks virnastatud CMOS-sensorid, kvant-pildisensorid ja kõverad sensorid.
Nutitelefonidest kuniteaduskaameradCMOS on osutunud kohanemisvõimeliseks, võimsaks ja tulevikukindlaks.
Kokkuvõte
CMOS-sensoritest on tänu oma jõudluse, efektiivsuse ja hinna tasakaalule saanud enamiku pildindusrakenduste tänapäevane standard. Olenemata sellest, kas jäädvustate igapäevaseid mälestusi või teete kiiret teaduslikku analüüsi, pakub CMOS-tehnoloogia tänapäeva visuaalse maailma aluse.
Kuna uuendused nagu globaalse katiku CMOS ja sCMOS jätkavad tehnoloogia võimaluste laiendamist, peaks selle domineerimine jätkuma veel aastaid.
KKK
Mis vahe on rullkatikul ja globaalsel katil?
Rulluv katik loeb pildiandmeid rida-realt välja, mis võib kiiresti liikuvate objektide jäädvustamisel põhjustada liikumisega seotud artefakte (nt kalduvust või võnkumist).
Globaalne katik jäädvustab kogu kaadri samaaegselt, kõrvaldades liikumisest tuleneva moonutuse. See sobib ideaalselt kiirete pildistamisrakenduste, näiteks masinnägemise ja teaduskatsete jaoks.
Mis on rulluva katiku CMOS-i kattuvusrežiim?
CMOS-kaamerate puhul, millel on rullkatik, saab kattuvusrežiimis järgmise kaadri säritust alustada enne praeguse kaadri täielikku valmimist, mis võimaldab suuremat kaadrisagedust. See on võimalik, kuna iga rea säritus ja näit on ajaliselt nihutatud.
See režiim on kasulik rakendustes, kus maksimaalne kaadrisagedus ja läbilaskevõime on kriitilise tähtsusega, näiteks kiire kontrolli või reaalajas jälgimise puhul. See võib aga ajastuse ja sünkroniseerimise keerukust veidi suurendada.
Tucsen Photonics Co., Ltd. Kõik õigused kaitstud. Tsiteerides palun viidata allikale:www.tucsen.com








