 22/05/13
22/05/13ફુલ વેલ કેપેસિટી એ દરેક પિક્સેલ સમાવી શકે તેવા શોધાયેલા સિગ્નલની માત્રા છે, જે સંતૃપ્તિ સુધી પહોંચે તે પહેલાં કેમેરા શોધી શકે તેટલા તેજસ્વી સિગ્નલને નિર્ધારિત કરે છે. જો પિક્સેલ કૂવામાં ભરાઈ જવાને કારણે પિક્સેલ સંતૃપ્ત થઈ જાય, તો તે પિક્સેલની તીવ્રતા હવે ચોક્કસ રીતે રેકોર્ડ કરવામાં આવતી નથી. મોટી ગતિશીલ શ્રેણીની જરૂર હોય તેવા એપ્લિકેશનોમાં ઉચ્ચ પૂર્ણ વેલ કેપેસિટી એક ફાયદો છે.
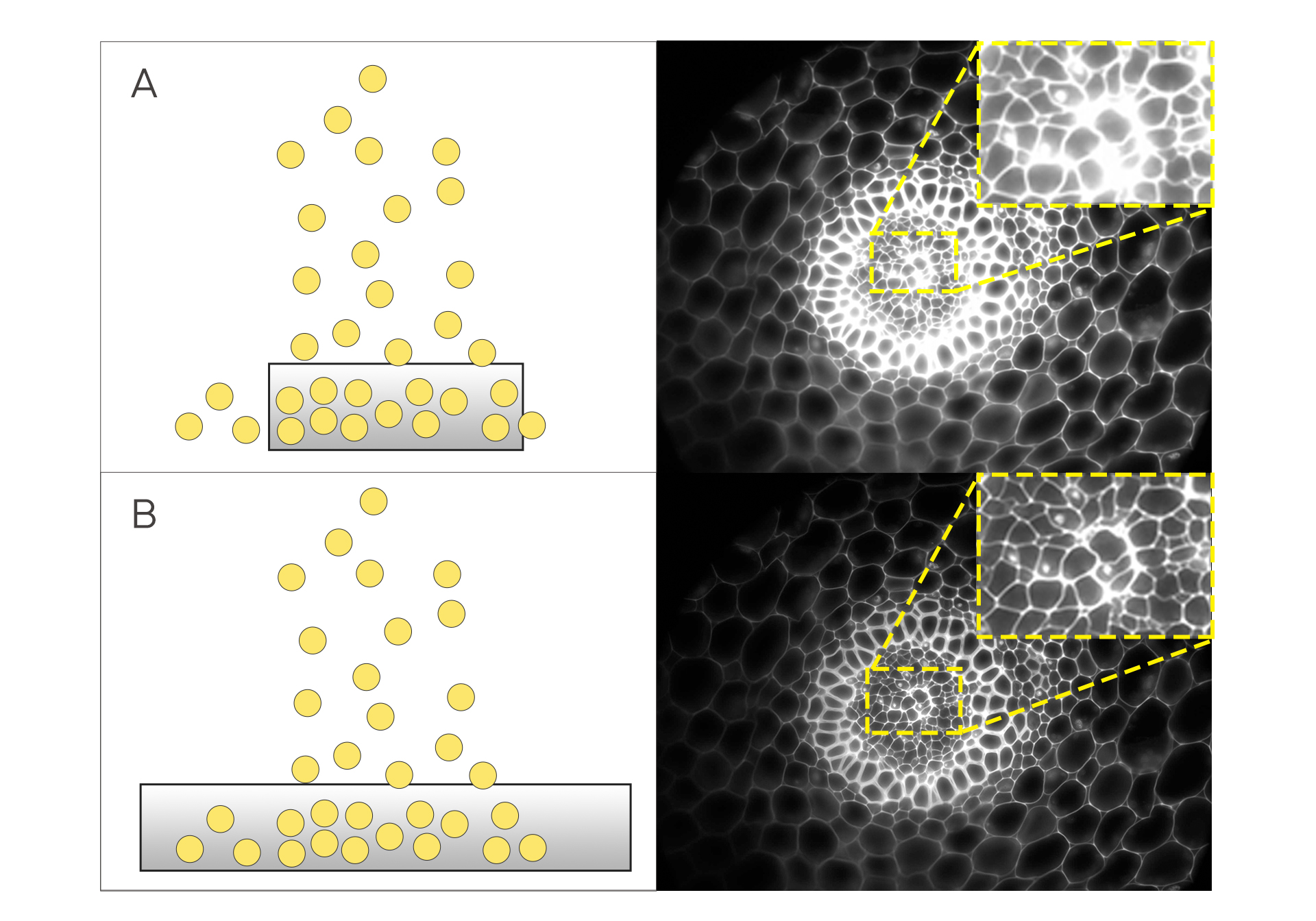
આકૃતિ 1 પૂર્ણ કૂવાની ક્ષમતા અને ગતિશીલ શ્રેણી વચ્ચેના સંબંધની કલ્પના કરે છે. આકૃતિ 1A: ઓછી પૂર્ણ કૂવાની ક્ષમતા છબીને તેજસ્વી સિગ્નલોની માહિતી ગુમાવવા દે છે. આકૃતિ 1B: ઉચ્ચ પૂર્ણ કૂવાની ક્ષમતા છબીને નબળાથી તેજસ્વી સિગ્નલો સુધીની સંપૂર્ણ માહિતી મેળવવા દે છે.
જ્યારે ઇમેજ એક્સપોઝર દરમિયાન ફોટોન શોધી કાઢવામાં આવે છે, ત્યારે તેઓ સિલિકોનની અંદર ઇલેક્ટ્રોન મુક્ત કરે છે, જે પછી વાંચન પૂર્ણ થાય ત્યાં સુધી પિક્સેલમાં સંગ્રહિત થાય છે. પિક્સેલમાં મહત્તમ સંખ્યામાં ઇલેક્ટ્રોન હોય છે જે ભૌતિક સ્ટોર ભરાઈ જાય અથવા ડિજિટલ ઇમેજ ગ્રેસ્કેલ મૂલ્ય મહત્તમ પહોંચે તે પહેલાં સંગ્રહિત કરી શકાય છે. આદર્શરીતે, એક્સપોઝર સમય અને પ્રકાશ સ્તરો એવી રીતે સેટ કરવા જોઈએ કે આ ક્યારેય થવા ન દે. જો કે, એવા કિસ્સાઓમાં જ્યાં ઉચ્ચ અને નીચા બંને સિગ્નલો એક જ છબીમાં દેખાય છે, ઓછા એક્સપોઝર સમય અથવા પ્રકાશ સ્તરનો ઉપયોગ છબીના ઝાંખા ભાગોમાં અર્થપૂર્ણ શોધ અથવા માપન માટે ખૂબ ઓછા સિગ્નલો ઉત્પન્ન કરી શકે છે કારણ કે અવાજ નબળા સિગ્નલોમાં દખલ કરે છે. ઉચ્ચ પૂર્ણ કૂવાની ક્ષમતા ઉચ્ચ સિગ્નલોને સંતૃપ્ત કર્યા વિના, ઝાંખા સિગ્નલો શોધવા માટે વધુ એક્સપોઝર સમય અથવા પ્રકાશ સ્તરોને મંજૂરી આપે છે. ડાયનેમિક રેન્જ વિશે વધુ માહિતી માટે, 'ડાયનેમિક રેન્જ' શબ્દાવલિ વિભાગ જુઓ.
જો ફક્ત ઓછા પ્રકાશની સ્થિતિમાં કામ કરી રહ્યા હોવ, અથવા જો ગતિશીલ શ્રેણી તમારા ઇમેજિંગમાં મુખ્ય ચિંતાનો વિષય ન હોય, તો પૂર્ણ-કૂતરાની ક્ષમતા તમારા આદર્શ કેમેરા પરિમાણો નક્કી કરવામાં ઓછી ભૂમિકા ભજવશે. કેટલાક કેમેરામાં બહુવિધ રીડઆઉટ વિકલ્પો અને મોડ્સ હોય છે, જે વિવિધ ફ્રેમ રેટ, અવાજ લાક્ષણિકતાઓ અને પૂર્ણ-કૂતરાની ક્ષમતા પ્રદાન કરે છે. આ કેમેરા માટે, ઘણીવાર ટ્રેડ-ઓફ શક્ય હોય છે જ્યાં ઉચ્ચ ઝડપ, ઓછા પ્રકાશ ઇમેજિંગ દૃશ્યો માટે આદર્શ, સુલભ પૂર્ણ-કૂતરાની ક્ષમતા ઘટાડવાના બદલામાં ઉચ્ચ કેમેરા ફ્રેમ દર પ્રાપ્ત કરી શકાય છે.








