 25.08.21
25.08.21Digitaalse pildistamise maailmas mõjutavad pildikvaliteeti vähesed tehnilised tegurid nii palju kui sensori elektroonilise katiku tüüp. Olenemata sellest, kas jäädvustate kiireid tööstusprotsesse, filmitegelikke järjestusi või jäädvustate nõrku astronoomilisi nähtusi, mängib CMOS-kaamera katikutehnoloogia olulist rolli selles, milline lõplik pilt välja tuleb.
Kaks domineerivat CMOS-elektrooniliste katikutüüpi – globaalsed katikud ja rullkatikud – kasutavad andurilt valguse säritamiseks ja lugemiseks väga erinevaid lähenemisviise. Nende erinevuste, tugevuste ja kompromisside mõistmine on oluline, kui soovite oma pildisüsteemi rakendusega sobitada.
See artikkel selgitab, mis on CMOS-elektroonilised aknaluugid, kuidas globaalsed ja rull-aknaluugid töötavad, kuidas need reaalsetes olukordades toimivad ja kuidas otsustada, milline neist teile kõige paremini sobib.
Mis on CMOS elektroonilised aknaluugid?
CMOS-sensor on enamiku tänapäevaste kaamerate süda. See vastutab sissetuleva valguse muundamise eest elektrilisteks signaalideks, mida saab pildiks töödelda. "Katik" kaameras...CMOS-kaameraei ole tingimata mehaaniline kardin – paljud tänapäevased disainilahendused tuginevad elektroonilisele katikule, mis kontrollib, kuidas ja millal pikslid valgust püüavad.
Erinevalt mehaanilisest katikust, mis füüsiliselt blokeerib valgust, töötab elektrooniline katik iga piksli sees laenguvoo käivitamise ja peatamise teel. CMOS-pildistamisel on kaks peamist elektroonilise katiku arhitektuuri: globaalne katik ja rullkatik.
Miks on eristamine oluline? Sest särituse ja näidu meetod mõjutab otseselt:
● Liikumise renderdamine ja moonutused
● Pildi teravus
● Hämaras tundlikkus
● Kaadrisagedus ja latentsus
● Üldine sobivus erinevat tüüpi fotograafia, video ja teadusliku pildistamise jaoks
Globaalse katiku mõistmine
Allikas: GMAX3405 globaalne katikuandur
Kuidas globaalne katik töötab
CMOS Global katikuga kaamerad alustavad ja lõpetavad särituse samaaegselt kogu sensori ulatuses. See saavutatakse kasutades 5 või enamat transistorit piksli kohta ja „salvestuskoodi“, mis hoiab omandatud fotoelektronide laenguid lugemise ajal. Särituse järjestus on järgmine:
1. Alustage säritust samaaegselt igas pikslis, eemaldades omandatud laengud maandusest.
2. Oodake valitud säriaja saabumist.
3. Särituse lõpus teisaldage omandatud laengud iga piksli salvestussõlme, lõpetades selle kaadri särituse.
4. Liigutage elektronid rida-realt piksli lugemiskondensaatorisse ja edastage akumuleeritud pinge lugemisarhitektuurile, mis kulmineerub analoog-digitaalmuunduritega (ADC). Järgmise särituse saab tavaliselt teha selle sammuga samaaegselt.
Globaalse katiku eelised
● Liikumisest tingitud moonutuste puudumine – Liikuvad objektid säilitavad oma kuju ja geomeetria ilma järjestikuse lugemise puhul esineva kalduvuse või võnkumiseta.
● Kiire jäädvustamine – ideaalne liikumise jäädvustamiseks kiiresti liikuvates stseenides, näiteks spordis, robootikas või tootmise kvaliteedikontrollis.
● Madal latentsusaeg – Kõik pildiandmed on korraga saadaval, võimaldades täpset sünkroniseerimist väliste sündmustega, näiteks laserimpulsside või stroboskoopvalgusega.
Globaalse katiku piirangud
● Väiksem valgustundlikkus – Mõned globaalse katiku pikslite disainid ohverdavad valguse kogumise efektiivsust, et mahutada samaaegse särituse jaoks vajalikku vooluringi.
● Kõrgemad kulud ja keerukus – Valmistamine on keerulisem, mis sageli toob kaasa kõrgemad hinnad võrreldes rullakendega.
● Võimalik suurenenud müra – olenevalt sensori konstruktsioonist võib piksli kohta kasutatav lisaelektroonika põhjustada veidi suuremat lugemismüra.
Rulluva aknaluugi mõistmine
Kuidas rull-luuk töötab
Kasutades ainult nelja transistorit ja ilma salvestussõlmeta, viib see lihtsam CMOS-pikslite disain keerukama elektroonilise katiku tööni. Rulluva katiku pikslid käivitavad ja peatavad sensori särituse üks rida korraga, "rulludes" sensoril allapoole. Iga särituse puhul järgitakse vastupidist järjestust (mis on samuti joonisel näidatud):
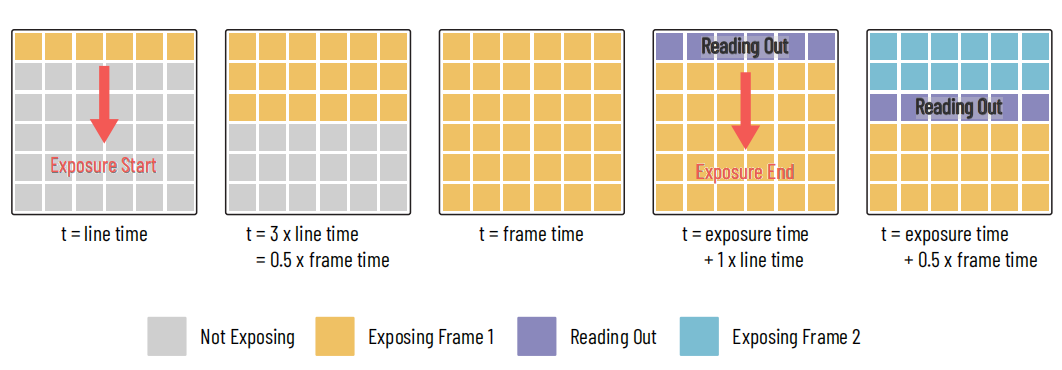
Joonis: 6x6 pikslise kaamerasensori rullkatiku protsess
Esimene kaader alustab säritust (kollane) sensori ülaosast, liikudes allapoole kiirusega üks rida rea kohta. Kui ülemise rea säritus on lõppenud, liigub näit (lilla) ja seejärel järgmise särituse algus (sinine) sensoril allapoole.
1. Alustage anduri ülemise rea kokkupuudet, suunates omandatud laengud maapinnale.
2. Pärast reaaja möödumist liikuge anduri teisele reale ja alustage säritust, korrates seda anduril allapoole.
3. Kui ülemise rea jaoks nõutud säriaeg on lõppenud, lõpetage säritus, saates omandatud laengud läbi lugemisarhitektuuri. Selleks kuluv aeg on „rea aeg“.
4. Niipea kui rea lugemine on lõppenud, on seade valmis säritust 1. sammust uuesti alustama, isegi kui see tähendab kattumist teiste ridadega, mis eelmist säritust tegid.
Rull-aknaluugi eelised
●Parem jõudlus hämaras valguses– Pikslite disainid saavad valguse kogumist prioritiseerida, parandades signaali-müra suhet hämarates tingimustes.
●Kõrgem dünaamiline ulatus– Järjestikuse lugemise disainid suudavad eredamaid esiletõstetud alasid ja tumedamaid varje graatsilisemalt käsitleda.
●Taskukohasem– Rullkatikuga CMOS-sensorid on levinumad ja nende tootmine on kulutõhusam.
Rulluva aknaluugi piirangud
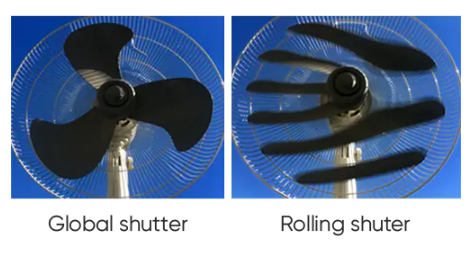
●Liikumisartefaktid– Kiiresti liikuvad objektid võivad tunduda viltu või painutatud, seda nimetatakse „rulluva katiku efektiks“.
●Jello efekt videos– Käestvaadatult filmitud videote vibratsioon või kiire panoraamimine võib põhjustada pildil värinat.
●Sünkroniseerimisprobleemid– Vähem ideaalne rakenduste jaoks, mis nõuavad täpset ajastamist väliste sündmuste korral.
Globaalne vs. Rolling Shutter: kõrvuti võrdlus
Siin on üldine ülevaade rull- ja globaalsete aknaluukidest:
| Funktsioon | Rulluv katik | Globaalne katik |
| Piksli disain | 4-transistor (4T), salvestussõlm puudub | 5+ transistorit, sisaldab salvestussõlme |
| Valgustundlikkus | Kõrgem täitetegur, hõlpsasti kohandatav taustvalgustusega formaadile → kõrgem QE | Madalam täitetegur, BSI keerukam |
| Müra jõudlus | Üldiselt madalam lugemismüra | Lisatud vooluringide tõttu võib müra olla veidi kõrgem |
| Liikumise moonutus | Võimalik (viltus, võnkumine, želeeefekt) | Puudub – kõik pikslid säritatakse samaaegselt |
| Kiiruse potentsiaal | Võib kattuda säritustega ja lugeda mitut rida; mõnes disainis sageli kiiremini | Piiratud täiskaadrilise näiduga, kuigi jagatud näit võib aidata |
| Maksumus | Madalamad tootmiskulud | Kõrgemad tootmiskulud |
| Parimad kasutusjuhud | Hämaras pildistamine, kinematograafia, üldine fotograafia | Kiire liikumise jäädvustamine, tööstuslik kontroll, täppismetroloogia |
Põhilised jõudluse erinevused
Rullkatiku pikslid kasutavad tavaliselt 4-transistorilist (4T) disaini ilma salvestussõlmeta, samas kui globaalsed katikud vajavad 5 või enamat transistorit piksli kohta pluss täiendavat vooluringi fotoelektronide salvestamiseks enne lugemist.
●Täitetegur ja tundlikkus– Lihtsam 4T arhitektuur võimaldab suuremat pikslite täitetegurit, mis tähendab, et iga piksli pinnast on suurem osa pühendatud valguse kogumisele. See disain koos asjaoluga, et rull-katiku andureid saab hõlpsamini taustvalgustusega vormingule kohandada, annab sageli suurema kvanttõhususe.
●Müra jõudlus– Väiksem transistoride arv ja lihtsam vooluring tähendavad üldiselt, et rull-katikutel on madalam lugemismüra, mistõttu sobivad need paremini hämaras valguses kasutamiseks.
●Kiiruse potentsiaal– Rulluksed võivad teatud arhitektuurides olla kiiremad, kuna need võimaldavad särituse ja näidu kattumist, kuigi see sõltub suuresti anduri disainist ja näidu elektroonikast.
Kulud ja tootmine – rull-katiku pikslite lihtsus tähendab tavaliselt madalamaid tootmiskulusid võrreldes globaalsete katikega.
Täiustatud kaalutlused ja tehnikad
Pseudoglobaalne katik
Olukordades, kus saate täpselt kontrollida, millal valgus sensorile jõuab – näiteks riistvara abil käivitatava LED- või laservalgusallika kasutamisel –, saate rullkatiku abil saavutada „globaalseid“ tulemusi. See pseudoglobaalse katiku meetod sünkroniseerib valgustuse säriaknaga, minimeerides liikumisega seotud artefakte ilma tõelist globaalset katiku disaini vajamata.
Pildi kattumine
Rulluva katiku andurid saavad järgmise kaadri säritamist alustada enne, kui praeguse kaadri lugemine on lõppenud. See kattuv säritus parandab töötsüklit ja on kasulik kiirete rakenduste jaoks, kus maksimaalse kaadrite arvu jäädvustamine sekundis on kriitilise tähtsusega, kuid võib keerulisemaks muuta ajastustundlikke katseid.
Mitme rea näit
Paljud kiired CMOS-kaamerad suudavad korraga lugeda rohkem kui ühte pikslirida. Mõnes režiimis loetakse ridu paaridena; täiustatud konstruktsioonides saab samaaegselt lugeda kuni nelja rida, mis vähendab tõhusalt kaadri lugemise koguaega.
Jagatud andurite arhitektuur
Nii rull- kui ka globaalsed aknaluugid saavad kasutada jagatud anduri paigutust, kus pildisensor on vertikaalselt jagatud kaheks pooleks, millel mõlemal on oma ADC-de rida.
● Rulluva katikuga sensorite puhul algab lugemine sageli keskelt ja liigub väljapoole nii üles kui ka alla, vähendades veelgi latentsusaega.
● Globaalse katiku disainides saab jagatud näidu abil parandada kaadrisagedust ilma särituse samaaegsust muutmata.
Kuidas valida oma rakenduse jaoks: rull- või globaalkatik?
Globaalne katik võib rakendustele kasuks tulla
● Nõuab sündmuste ülitäpset ajastust
● Nõuab väga lühikest säritusaega
● Nõua enne omandamise algust sündmusega sünkroonimiseks millisekundilist viivitust
● Jäädvustage suuremahulist liikumist või dünaamikat sarnasel või kiiremal ajaskaalal nagu rullkatikul.
● Nõuab sensori samaaegset pildistamist, kuid ei saa valgusallikaid juhtida pseudoglobaalse katiku kasutamiseks suurel alal
Rulluks võib olla kasulik rakenduste jaoks
● Keerulised hämaras valguses rakendused: rull-katikuga kaamerate täiendav kvanttõhusus ja madalam müra parandavad sageli signaali-müra suhet (SNR).
● Kiired rakendused, kus anduri täpne samaaegsus pole oluline või viivitus on eksperimentaalsete ajaskaaladega võrreldes väike
● Muud üldisemad rakendused, kus rull-katikuga kaamerate tootmise lihtsus ja madalam hind on kasulikud
Levinud väärarusaamad
1. "Rullkatiku kasutamine on alati halb."
See ei ole tõsi – rullkardinad sobivad ideaalselt paljudeks kasutusjuhtudeks ja ületavad sageli globaalseid aknakatteid hämaras ja dünaamilises vahemikus.
2. "Globaalne katik on alati parem."
Kuigi moonutusteta jäädvustamine on eelis, võivad kulude, müra ja tundlikkuse kompromissid kaaluda üles aeglasema pildistamistempoga pildistamise eelised.
3. "Rullkatikuga ei saa videot filmida."
Paljud tipptasemel kinokaamerad kasutavad rull-katikuid tõhusalt; hoolikad pildistamistehnikad võivad artefakte minimeerida.
4. "Globaalsed katikud kõrvaldavad igasuguse liikumisest tingitud hägususe."
Need hoiavad ära geomeetrilise moonutuse, kuid pikkade säriaegade tõttu võib siiski tekkida liikumisest tingitud hägusus.
Kokkuvõte
CMOS-kaamera globaalse ja rullkatiku tehnoloogia vahel valimine taandub tasakaalule liikumiskäitluse, valgustundlikkuse, hinna ja teie konkreetsete rakenduse vajaduste vahel.
● Kui vajate kiirelt liikuvate stseenide puhul moonutusteta jäädvustamist, on globaalne katik selge valik.
● Kui eelistate hämaras valguses pildistamist, dünaamilist ulatust ja eelarvet, annab rullkatik sageli parimaid tulemusi.
Nende erinevuste mõistmine tagab, et saate valida õige tööriista – olgu see siis teaduslikuks pildistamiseks, tööstuslikuks jälgimiseks või loominguliseks tootmiseks.
KKK
Milline katiku tüüp sobib paremini aerofotograafia või drooniga kaardistamise jaoks?
Kaardistamisel, mõõdistamise ja kontrolli puhul, kus geomeetriline täpsus on ülioluline, eelistatakse moonutuste vältimiseks globaalset katikut. Loomingulise õhust video puhul võib aga rullkatik siiski suurepäraseid tulemusi anda, kui liikumist kontrollitakse.
Kuidas mõjutab katiku valik pildistamist hämaras?
Rull-akendel on üldiselt eelis hämaras toimivuses, kuna nende pikslite disainilahendused saavad seada esikohale valguse kogumise efektiivsuse. Globaalsed aknaluugid võivad vajada keerukamat vooluringi, mis võib tundlikkust veidi vähendada, kuigi tänapäevased disainid seda lõhet täidavad.
Kuidas katiku tüüp mõjutabteaduskaamera?
Kiirete teaduslike kujutiste puhul – näiteks osakeste jälgimise, rakkude dünaamika või ballistika puhul – on globaalne katik sageli liikumise moonutuste vältimiseks hädavajalik. Kuid hämaras valguses fluorestsentsmikroskoopia puhul onsCMOS-kaameraTundlikkuse ja dünaamilise ulatuse maksimeerimiseks võib valida rulluva katikuga pildi.
Kumb on tööstuslikuks kontrolliks parem?
Enamikus tööstuslikes kontrolliülesannetes – eriti nendes, mis hõlmavad liikuvaid konveierilinte, robootikat või masinnägemist – on globaalne katik turvalisem valik, et tagada täpsed mõõtmised ilma liikumisest tingitud geomeetriliste vigadeta.
Tucsen Photonics Co., Ltd. Kõik õigused kaitstud. Tsiteerides palun viidata allikale:www.tucsen.com








