 23.01.28
23.01.28Tucseni sCMOS-kaamerad kasutavad TTL-päästikuid standardse SMA-liidesega. Selleks tuleb lihtsalt ühendada SMA-ühendusega päästikukaabel kaamerast välise seadme päästiku sisendporti. Järgmised kaamerad kasutavad seda liidest:
● Dhyana 400BSI
● Dhyana 95
● Dhyana 400D
● Dhyana 6060 ja 6060BSI
● Dhyana 4040 ja 4040BSI
● Dhyana XF95/XF400BSI
Kui teie kaamera on Tucsen Dhyana 401D või FL20-BW, järgige palun allpool nende kaamerate jaoks mõeldud konkreetseid juhiseid.
Allolev kontaktide skeem näitab, kuhu kaamera päästikukaabel ühendada. Kui see on kaamera ja välise seadme vahele ühendatud, olete valmis päästiku seadistama!
Päästikukaabli ja kontaktide skeemid
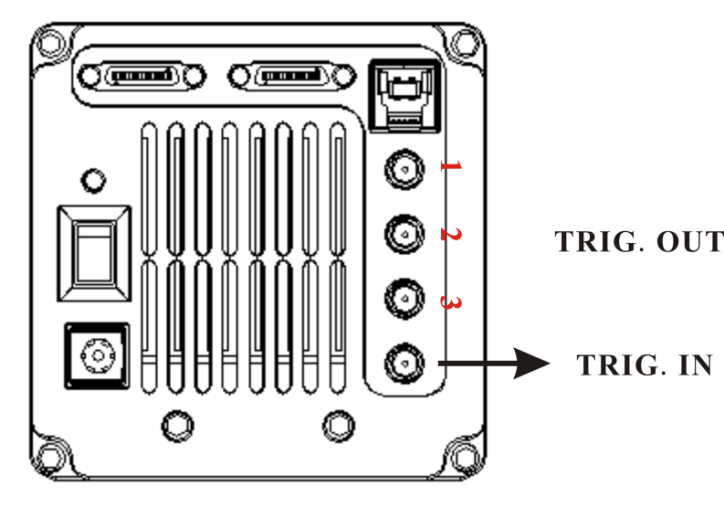
SMA päästikuliidesega sCMOS-kaamerate päästiku pistikute skeem.
| SMA-tihvt | PIN-koodi nimi | Selgitus |
| 1 | TRIG.SISSE | Kaamera omandamise ajastuse juhtimiseks mõeldud käivitussignaal |
| 2 | TRIG.VÄLJUN1 | Väljundlüliti 1 – konfigureeritav, vaikimisi: signaal „Näidu lõpp” |
| 3 | TRIG.VÄLJUNDI2 | Päästiku väljund 2 – konfigureeritav, vaikimisi: signaal „Globaalne” |
| 4 | TRIG.VÄLJUNDI3 | Päästiku väljund 3 – konfigureeritav, vaikimisi: särituse alguse signaal |
Käivituspinge vahemik
SMA päästiku väljundpinge on 3,3 V.
Päästiku sisendpinge vahemik on 3,3 V kuni 5 V.
Päästiku režiimid & Seaded
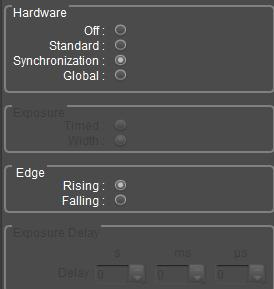
Tucseni sCMOS-kaameratel on mitu erinevat töörežiimi väliste riistvaraliste päästikute (päästiku sisendsignaalide) käsitlemiseks ning lisaks mõned optimeerimis- ja rakendusekohased seadistused. Need seadistused peaksid teie tarkvarapaketis saadaval olema. Allolev ekraanipilt näitab, kuidas need seadistused Tucseni Mosaic tarkvaras kuvatakse.
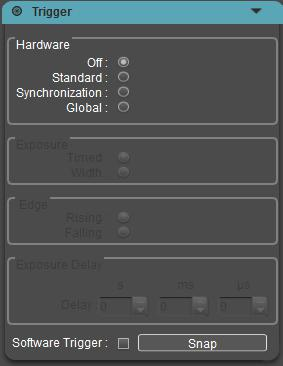
Riistvaralise päästiku seadistus
Sellel seadistusel on neli valikut, mis määravad, kuidas ja kas kaamera töötab oma sisemise ajastusega, mis on sõltumatu välistest käivitustest, või kas kaamera käitumist juhitakse väliste signaalide abil. Lisaks on võimalik kasutada tarkvaralist käivitust.
Need sätted on kokku võetud allolevas tabelis ja lisateavet leiate järgmistest osadest.
| Seadistamine | Selgitus |
| Väljas | Sisemine taimeri režiim. Kõiki väliseid käivitusi ignoreeritakse ja kaamera töötab maksimaalse võimaliku kiirusega. |
| Standardne | Lihtne käivitusrežiim, kus iga käivitussignaal käivitab kaadri hankimise. |
| Sünkroniseeritud | Pärast esialgset „start”-päästikusignaali töötab kaamera pidevalt, kusjuures iga uus päästikusignaal lõpetab praeguse kaadri särituse ja alustab järgmise kaadri pildistamist. |
| Globaalne | Kaamera töötab pseudoglobaalses olekus, et jäljendada valgusallikaga sünkroniseerimise kaudu globaalse katiku efekti rulluva katikuga kaameraga. |
| Tarkvara | Täiustatud režiim käivitussignaali simuleerimiseks selle SetGpio funktsiooni kaudu. |
MärkusKõigil juhtudel on käivitussignaali vastuvõtmise ja omandamise alguse vahel väga väike viivitus. See viivitus jääb nulli ja ühe kaamera reaaja vahele – st aeg, mis kulub kaameral ühe rea lugemiseks. Näiteks Dhyana 95 puhul on reaaeg 21 μs, seega on viivitus vahemikus 0 kuni 21 μs. Lihtsuse huvides ei ole seda viivitust allolevatel ajastusdiagrammidel näidatud.
Väljalülitatud režiim
Selles režiimis töötab kaamera sisemise taimeriga maksimaalse kiirusega, ignoreerides väliseid päästikuid.
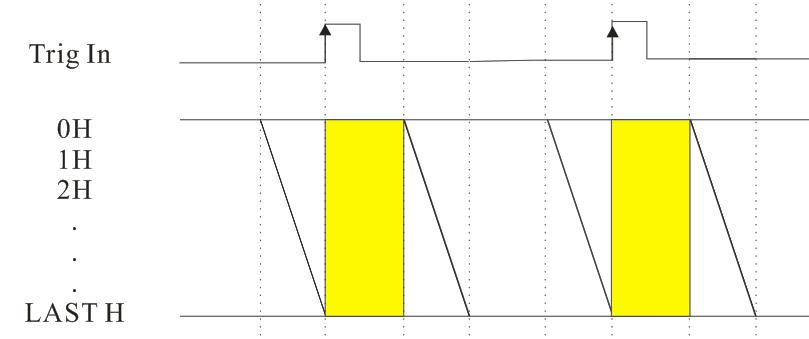
Standardrežiim
Standardrežiimis vajab kaamera iga kaadri jäädvustamine välist käivitussignaali. Särituse pikkust saab määrata kas käivitussignaali abil (nagu 'Exposure: Width' (Säritus: Laius) või tarkvara abil (nagu 'Exposure: Timed' (Säritus: Ajastatud)).
Nagu ka mitte-päästikulise särituse puhul, saab kaamera töötada kattuvusrežiimis, mis tähendab, et järgmise kaadri särituse algus saab toimuda kohe, kui praeguse kaadri esimene rida on särituse ja näidu lõpetanud. See tähendab, et saadaval on kuni kaamera täiskaadrisagedus, olenevalt sissetulevate päästikusignaalide kiirusest ja kasutatud säriajast.
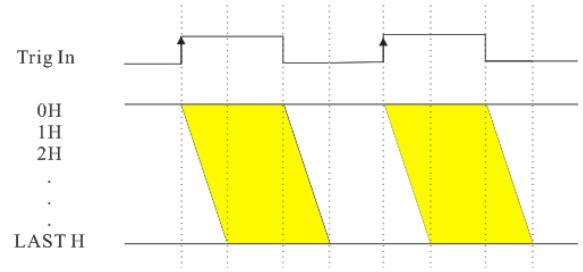
A: Päästiku käitumine standardrežiimis (säritus: laius, serv: tõusev).
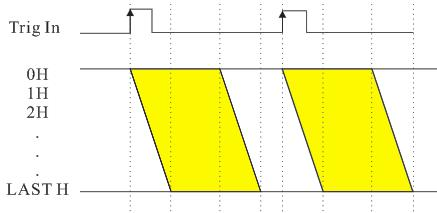
B: Päästiku käitumine standardrežiimis (säritus: aeg, serv: tõusev). Kollased kujundid tähistavad kaamera säritust. 0H, 1H, 2H… tähistavad iga horisontaalset kaamerarida, kusjuures CMOS-kaamera rulluva katiku tõttu on reast reani viivitus. Nagu ka mitte-päästikulise „voo” omandamise puhul, võib uue kaadri algus kattuda praeguse kaadri näiduga, mis tähendab, et kollaste kujundite diagonaalsed komponendid võivad omavahel põimuda.
Sünkroonimisrežiim
Sünkroniseerimisrežiim on võimas režiim, mida saab kasutada näiteks pöörleva ketta konfokaalses mikroskoopias kaamera pildistamise sünkroonimiseks ketta pöörlemisega, et vältida triibulisi artefakte.
Selles režiimis alustab esimene käivitussignaal esimese kaadri säritust. Järgmine käivitussignaal lõpetab praeguse kaadri särituse ja alustab lugemisprotsessi, millele järgneb kohe järgmise särituse algus, nagu on näidatud alloleval diagrammil. Seda korratakse iga järgneva käivitussignaali puhul. Pange tähele, et see nõuab ühe signaaliimpulsi saatmist rohkem kui on tehtud pilte.
Selles režiimis määrab särituse kestuse ühe päästikusignaali ja järgmise vahelise aja pikkus.
Minimaalne aeg käivitussignaalide vahel on kaadri lugemise aeg, mis on antud kaamera maksimaalse kaadrisageduse pöördväärtus. Dhyana 95 puhul, mille kaadrisagedus on 24 kaadrit sekundis, oleks minimaalne signaalidevaheline aeg seega 1000 ms / 24 ≈ 42 ms. Enne seda aega saadetud signaale ignoreeritakse.
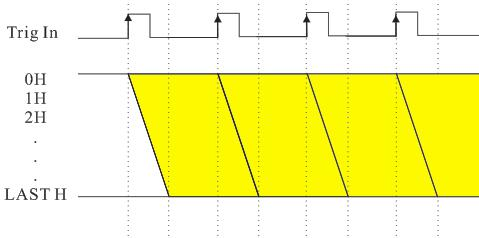
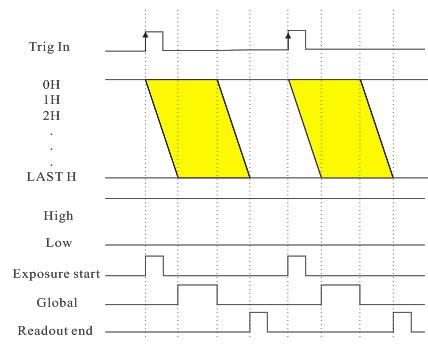
Globaalne režiim
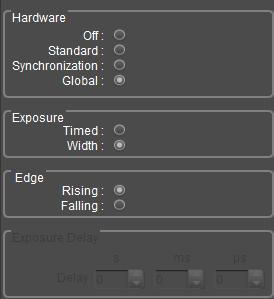
Koos käivitatava/pulseeriva valgusallikaga võimaldab globaalne režiim kaameral töötada „pseudoglobaalses“ olekus, vältides probleeme, mis võivad teatud tüüpi pildistamisel tekkida kaamera rullkatikuga. Lisateavet pseudoglobaalsete katiku kohta leiate selle lehe lõpus olevast jaotisest „Pseudoglobaalne katik“.
Kuidas globaalne režiim töötab
Globaalne režiim Päästik Töötab.
Globaalses režiimis käivitatakse tarkvaras särituse omandamise alustamisel kaamera kaadri särituse eelkäivitusel, et särituse algus saaks sensoril allapoole liikuda. See etapp peaks toimuma pimedas, valgusallikas välja lülitatuna.
Kui see protsess on lõppenud, on kaamera valmis vastu võtma käivitussignaali, et alustada „globaalset” säritust, mille jooksul peaks kaamerasse valgust suunatama. Selle globaalse särituse faasi kestus määratakse kas tarkvaraliselt (nagu „Säritus: ajastatud”) või vastuvõetud käivitussignaali pikkuse järgi (nagu „Säritus: laius”).
Selle särituse lõpus alustab kaamera särituse lõpu „veeretamist“ ja alustab kohe järgmise kaadri eelsärituse faasi – jällegi peaks see etapp toimuma pimedas.
Kui valgusallikas aktiveeritakse välise käivitussignaaliga, saab seda signaali kasutada ka kaamera omandamise käivitamiseks, mis võimaldab lihtsamat ja mugavamat riistvara seadistamist. Teise võimalusena, kui valgusallikas väljastab käivitussignaali, mis näitab selle sisselülitamist, saab seda kasutada kaamera omandamise käivitamiseks.
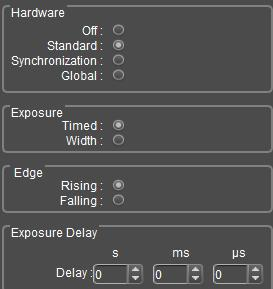
Särituse seadistus
Kaamera säriaega saab juhtida kas tarkvara või välise riistvara abil käivitussignaali kestuse abil. Särituse jaoks on kaks seadet:
Ajastatud:Kaamera särituse määrab tarkvara.
LaiusKaamera särituse kestuse määramiseks kasutatakse kõrge signaali kestust (tõusva serva režiimi puhul) või madala signaali kestust (langeva serva režiimi puhul). Seda režiimi nimetatakse mõnikord ka „taseme” või „pirni” päästikuks.
Serva seadistamine
Sellel seadistusel on kaks valikut, olenevalt teie riistvara seadistusest:
TõusevKaamera signaali omandamise käivitab madalast kõrgele nihkumise signaali tõusev serv.
Kukkumine:Kaamera hõivamine käivitub kõrgest madalaks signaali langeva serva poolt.
Viivituse seadistamine
Päästiku vastuvõtmise hetkest kuni kaamera särituse alustamiseni saab lisada viivituse. Selle saab määrata vahemikus 0 kuni 10 sekundit ja vaikeväärtus on 0 sekundit.
Märkus päästiku ajastuse kohta: veenduge, et päästikuid ei jäetaks kasutamata
Igas režiimis peab päästikute vaheline ajavahemik (mis on antud kõrge ja madala signaali kestuse alusel) olema piisavalt pikk, et kaamera oleks taas pildi salvestamiseks valmis. Vastasel juhul ignoreeritakse päästikke, mis saadetakse enne kaamera uut pildi salvestamiseks valmisolekut.
Režiimi ajastusnõuete kohta vaadake ülaltoodud režiimi kirjeldusi.
Päästiku režiimid ja sätted
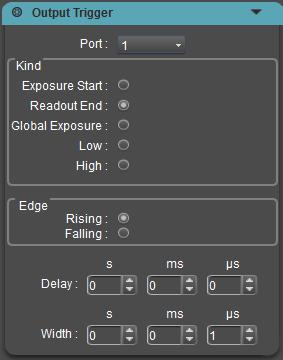
Kui Trigger Out kaablid on ühendatud välise riistvara ja kaamera Trigger Out pordi(de) vahele, nagu on näidatud ülaltoodud jaotises „Päästikukaabel ja kontaktide skeemid”, olete valmis kaamera konfigureerima nii, et see väljastaks teie seadistusele sobivaid päästiksignaale. Selle konfigureerimise sätted peaksid teie tarkvarapaketis saadaval olema. Allolev ekraanipilt näitab, kuidas need sätted Tucseni Mosaic tarkvaras kuvatakse.
Päästiku väljundpordid
Tucseni sCMOS-kaameratel on kolm Trigger Out porti, millel kõigil on oma Trigger Out tihvtid - TRIG.OUT1, TRIG.OUT2 ja TRIG.OUT3. Igaüht neist saab iseseisvalt konfigureerida, iseseisvalt töötada ja ühendada eraldi väliste seadmetega.
Päästiku välja liik
Kaamera tööfaasi käivitusväljundi näitamiseks on viis valikut:
Särituse algussaadab päästiku („Tõusva serva” päästikute puhul madalast kõrgeni) hetkel, kui kaadri esimene rida hakkab säritama. Päästikusignaali laiuse määrab säte „Laius”.
Näidu lõppnäitab, millal kaamera viimane rida oma näidu lõpetab. Päästikusignaali laiuse määrab säte „Laius”.
Globaalne kokkupuudeNäitab särituse faasi, mille jooksul kõik kaamera read säritavad samaaegselt, pärast särituse algust ja enne särituse lõpu ja näidu „veeremist“. Kui seda kasutatakse valgusallika või muu sündmuse juhtimiseks teie katses, võib see anda tulemuseks „pseudoglobaalse katiku“. See võimaldab andmeid samaaegselt kogu kaamera sensorilt hankida ilma sCMOS-i rulluva katiku mõjutamata. Lisateavet pseudoglobaalse katiku kohta leiate allpool olevast jaotisest „Pseudoglobaalne katik“.
Kõrge: See režiim põhjustab pinni pideva kõrge signaali väljundi.
Madal:See režiim põhjustab pinni pideva madala signaali väljastamise.
Päästiku serv
See määrab päästiku polaarsuse:
Tõusev:Tõusvat serva (madalast kõrgele pingele) kasutatakse sündmuste näitamiseks
Kukkumine:Langevat serva (kõrgest pingest madalale) kasutatakse sündmuste näitamiseks
Viivitus
Päästiku ajastusele saab lisada kohandatava viivituse, mis lükkab kõik Päästiku väljundi sündmuse signaalid edasi määratud aja võrra vahemikus 0 kuni 10 sekundit. Vaikimisi on viivitus seatud väärtusele 0 sekundit.
Päästiku laius
See määrab sündmuste tähistamiseks kasutatava käivitussignaali laiuse. Vaikimisi laius on 5 ms ja laiust saab kohandada vahemikus 1 μs kuni 10 sekundit.
Pseudoglobaalsed aknaluugid
Mõnede pildindusrakenduste puhul võib rullkatikuga kaamera töö põhjustada artefakte, ebaefektiivsust ajastuses või valgusdoosis proovis või piltide vahelist üleminekut, kus kaadrite vahel toimuvad riistvaralised muudatused. Pseudoglobaalne töö aitab neist väljakutsetest üle saada.
KuidasPseudo global Katiku töö
Kaadri särituse alguses "veereb" iga rea särituse algus kaameras allapoole, kuni iga rida säritab. Kui selle protsessi käigus lülitatakse valgusallikas välja ja kaamerasse ei jõua valgust, siis "veeremise" faasis infot ei koguta. Kui iga rida on särituse alustanud, käitub kaamera nüüd "globaalselt" ja iga kaamera osa on valmis valgust vastu võtma ilma sensoril viibimata.
Kui valgusallikas lülitatakse uuesti välja särituse lõpu „veeremise“ ja iga rea näidu sensoril allapoole liikumise ajal, siis selle mitteglobaalse faasi käigus jällegi mingit teavet ei koguta.
Valgusallika impulsi kestus määrab seega kaamera efektiivse särituse ehk aja, mille jooksul valgust kogutakse.
Tucseni sCMOS-kaamerad saavad pseudoglobaalse katiku saavutada kahel meetodil: kas kaamera ja valgusallika käivitamise teel välise ajastuse abil (vt eespool jaotist „Trigger In riistvaraline trigeri seadistus: globaalne“) või käivitatava valgusallika juhtimise teel kaamera Trigger Out portide kaudu, mis on sätteks „Trigger Out tüüp: globaalne“.
Globaalse operatsiooni ajastus
Pane tähele, et pseudoglobaalse katikuga töötades väheneb kaamera kaadrisagedus, kuna kaadrite vahele on vaja lisada lugemise/särituse alustamise faas. Selle faasi kestuse määrab kaamera lugemisaeg, näiteks Dhyana 95 täiskaadri puhul umbes 42 ms.
Kaadri koguaeg on antud selle kaadriaja, „globaalse” säriaja ja mis tahes viivituse võrra eelmise kaadri lugemise lõpu ja järgmise kaadri salvestamise alustamise vahel.








