 ۲۳/۰۱/۲۸
۲۳/۰۱/۲۸دوربینهای sCMOS توسن از تریگرهای TTL با رابط استاندارد SMA استفاده میکنند. این کار صرفاً نیاز به اتصال یک کابل تریگر با اتصال SMA از دوربین به پورت تریگر دستگاه خارجی شما دارد. دوربینهای زیر از این رابط استفاده میکنند:
● دیانا ۴۰۰BSI
● دیانا ۹۵
● دیانا ۴۰۰ دی
● دیانا ۶۰۶۰ و ۶۰۶۰BSI
● دیانا ۴۰۴۰ و ۴۰۴۰BSI
● دیانا XF95/XF400BSI
اگر دوربین شما Tucsen Dhyana 401D یا FL20-BW است، لطفاً دستورالعملهای خاص مربوط به این دوربینها را که در زیر آمده است، دنبال کنید.
نمودار پین اوت زیر محل اتصال کابل تریگر را روی دوربین شما نشان میدهد. پس از اتصال این کابل بین دوربین و دستگاه خارجی، آماده راهاندازی تریگر هستید!
نمودارهای کابل تریگر و پین اوت
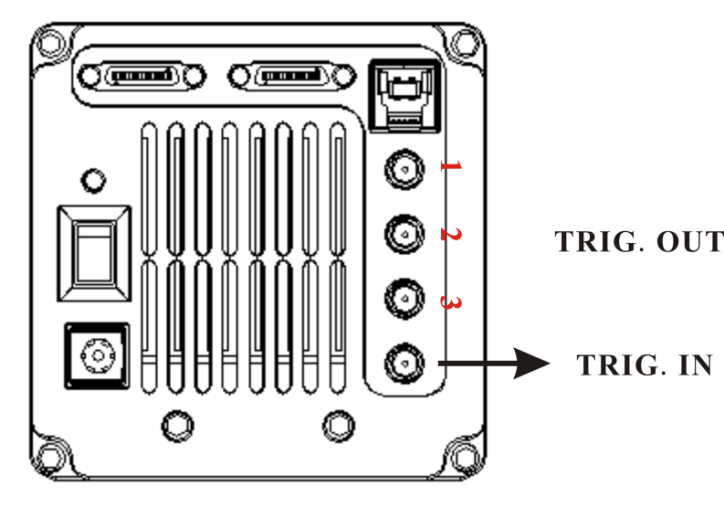
نمودار پین تریگر برای دوربینهای sCMOS با رابط تریگر SMA.
| پین SMA | نام پین | توضیح |
| ۱ | تریگ.این | فعال کردن سیگنال برای کنترل زمانبندی دریافت تصویر دوربین |
| ۲ | TRIG.OUT1 | تریگر اوت ۱ - قابل تنظیم، پیشفرض: سیگنال «پایان بازخوانی» |
| ۳ | TRIG.OUT2 | تریگر اوت ۲ - قابل تنظیم، پیشفرض: سیگنال «سراسری» |
| ۴ | TRIG.OUT3 | تریگر اوت ۳ - قابل تنظیم، پیشفرض: سیگنال «شروع نوردهی» |
محدوده ولتاژ برای فعالسازی
ولتاژ خروجی از تریگر SMA برابر با ۳.۳ ولت است.
محدوده ولتاژ ورودی قابل قبول برای تریگر بین ۳.۳ ولت و ۵ ولت است.
حالتهای فعالسازی و تنظیمات
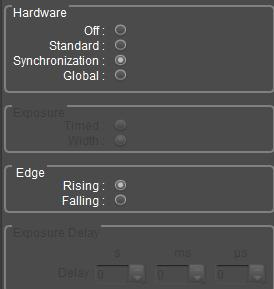
دوربینهای sCMOS توسن چندین حالت عملیاتی مختلف برای مدیریت محرکهای سختافزاری خارجی (سیگنالهای Trigger In) دارند، در کنار چند تنظیمات برای بهینهسازی و انتخاب برای کاربرد شما. این تنظیمات باید در بسته نرمافزاری شما موجود باشد. تصویر زیر نحوه نمایش این تنظیمات در نرمافزار Mosaic توسن را نشان میدهد.
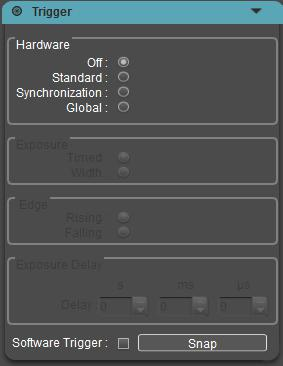
تنظیمات تریگر سختافزاری
چهار گزینه برای این تنظیم وجود دارد که تعیین میکند دوربین چگونه و آیا مستقل از محرکهای خارجی، بر اساس زمانبندی داخلی خود عمل خواهد کرد یا اینکه رفتار دوربین توسط سیگنالهای خارجی کنترل میشود. علاوه بر این، استفاده از یک محرک نرمافزاری نیز امکانپذیر است.
این تنظیمات در جدول زیر خلاصه شدهاند و اطلاعات بیشتر در بخشهای بعدی ارائه شده است.
| تنظیم | توضیح |
| خاموش | حالت زمانبندی داخلی. تمام محرکهای خارجی نادیده گرفته میشوند و دوربین با حداکثر سرعت ممکن کار میکند. |
| استاندارد | حالت عملیاتی ساده با محرک، که در آن هر سیگنال محرک، دریافت یک فریم را فعال میکند. |
| هماهنگشده | پس از یک سیگنال اولیهی «شروع»، دوربین به طور مداوم کار میکند و هر سیگنال جدید، پایان نوردهی فریم فعلی و شروع فریم بعدی را اعلام میکند. |
| جهانی | دوربین در حالت «شبه سراسری» اجرا خواهد شد تا از طریق هماهنگسازی با یک منبع نور، اثر شاتر سراسری را با یک دوربین با شاتر چرخشی شبیهسازی کند. |
| نرمافزار | یک حالت پیشرفته برای شبیهسازی سیگنال تریگر از طریق تابع SetGpio. |
توجه داشته باشیددر همه موارد، بین دریافت سیگنال Trigger In و شروع تصویربرداری، تأخیر بسیار جزئی وجود خواهد داشت. این تأخیر بین صفر تا یک زمان خط دوربین خواهد بود - یعنی زمانی که طول میکشد تا دوربین یک خط را بخواند. به عنوان مثال، برای Dhyana 95، زمان خط ۲۱ میکروثانیه است، بنابراین تأخیر بین ۰ تا ۲۱ میکروثانیه خواهد بود. این تأخیر برای سادگی در نمودارهای زمانی زیر نشان داده نشده است.
حالت «خاموش»
در این حالت، دوربین با حداکثر سرعت و بر اساس زمانبندی داخلی کار میکند و محرکهای خارجی را نادیده میگیرد.
حالت استاندارد
در حالت استاندارد، هر فریم از تصویربرداری دوربین به یک سیگنال تریگر خارجی نیاز دارد. مدت زمان نوردهی را میتوان یا توسط سیگنال تریگر (مانند 'Exposure: Width') یا توسط نرمافزار (مانند 'Exposure: Timed') تنظیم کرد.
مانند حالت تصویربرداری بدون نیاز به فعالسازی، دوربین قادر به کار در «حالت همپوشانی» است، به این معنی که شروع نوردهی فریم بعدی میتواند به محض اینکه اولین سطر فریم فعلی نوردهی و خوانش خود را به پایان رساند، شروع شود. این بدان معناست که بسته به نرخ سیگنالهای ورودی فعالسازی و زمان نوردهی مورد استفاده، تا نرخ فریم کامل دوربین در دسترس است.
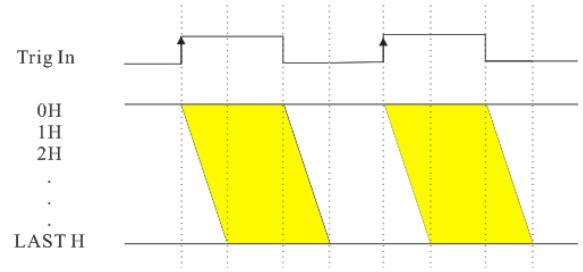
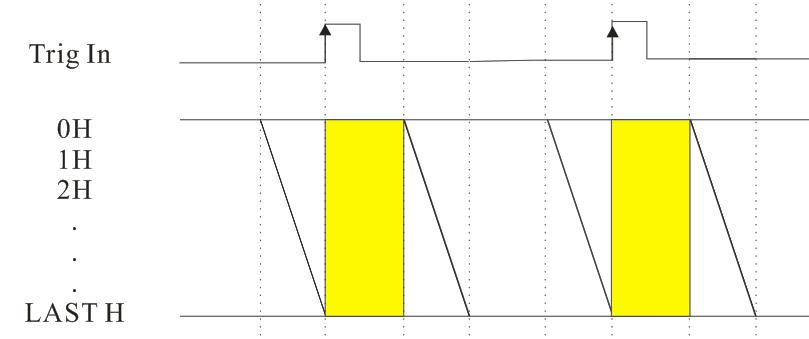
الف) فعال شدن در حالت استاندارد (نوردهی: عرض، لبه: افزایشی).
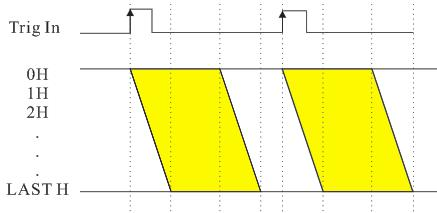
ب: رفتار تریگر در حالت استاندارد (نوردهی: زمان، لبه: افزایشی). شکلهای زرد نشاندهندهی نوردهی دوربین هستند. 0H، 1H، 2H… نشاندهندهی هر ردیف افقی دوربین هستند، با تأخیر از یک ردیف به ردیف بعدی به دلیل شاتر چرخشی دوربین CMOS. همانند ضبط «جریان» بدون تریگر، شروع فریم جدید ممکن است با بازخوانی فریم فعلی همپوشانی داشته باشد، به این معنی که اجزای مورب اشکال زرد ممکن است با یکدیگر در هم تنیده شوند.
حالت همگامسازی
حالت همگامسازی، حالت قدرتمندی است که میتواند برای مثال در میکروسکوپی کانفوکال دیسک چرخان برای همگامسازی تصویربرداری دوربین با چرخش دیسک و جلوگیری از ایجاد رگههای تصویر استفاده شود.
در این حالت، اولین سیگنال فعالکننده، نوردهی اولین فریم را آغاز میکند. سیگنال فعالکننده بعدی، نوردهی فریم فعلی را پایان میدهد و فرآیند بازخوانی را آغاز میکند و بلافاصله پس از آن، نوردهی بعدی آغاز میشود، همانطور که در نمودار زیر نشان داده شده است. این کار برای هر سیگنال فعالکننده بعدی تکرار میشود. توجه داشته باشید که این امر مستلزم ارسال یک پالس سیگنال بیشتر از تعداد تصاویر دریافتی است.
مدت زمان نوردهی در این حالت با توجه به مدت زمان بین یک سیگنال تریگر و سیگنال بعدی تنظیم میشود.
حداقل زمان بین سیگنالهای تریگر، زمان خواندن فریم است که با معکوس حداکثر نرخ فریم برای آن دوربین بدست میآید. برای یک Dhyana 95، با نرخ فریم ۲۴ فریم در ثانیه، حداقل زمان بین سیگنالها ۱۰۰۰ میلیثانیه / ۲۴ ≈ ۴۲ میلیثانیه خواهد بود. هر سیگنالی که قبل از این زمان ارسال شود، نادیده گرفته میشود.
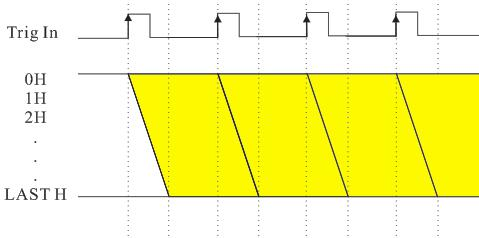
حالت جهانی
حالت سراسری (Global mode) در ترکیب با یک منبع نور قابل تحریک/پالسی به دوربین اجازه میدهد تا در حالت «شبه سراسری» عمل کند و از مشکلاتی که ممکن است در اثر شاتر چرخشی دوربین در انواع خاصی از تصویربرداری ایجاد شود، جلوگیری کند. برای اطلاعات بیشتر در مورد شاترهای شبه سراسری، به بخش «شاتر شبه سراسری» در انتهای این صفحه مراجعه کنید.
نحوه عملکرد حالت جهانی
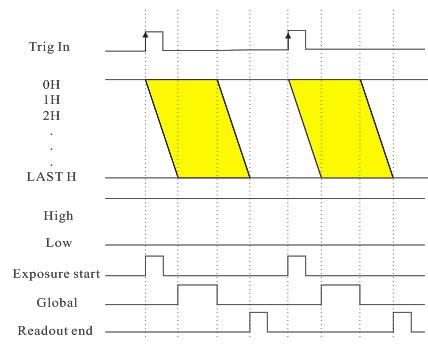
تریگر حالت سراسری در حال کار.
در حالت سراسری، با شروع فرآیند دریافت تصویر در نرمافزار، دوربین برای شروع نوردهی فریم «از پیش فعال» میشود تا امکان «چرخش» شروع نوردهی به سمت پایین حسگر فراهم شود. این مرحله باید در تاریکی و با غیرفعال بودن منبع نور رخ دهد.
پس از اتمام این فرآیند، دوربین آماده دریافت سیگنال فعالسازی برای شروع نوردهی «سراسری» است که در طی آن باید نور به دوربین ارسال شود. مدت زمان این مرحله نوردهی سراسری یا توسط نرمافزار (مانند «نوردهی: زمانبندیشده») یا توسط طول سیگنال فعالسازی دریافتی (مانند «نوردهی: عرض») تنظیم میشود.
در پایان این نوردهی، دوربین شروع به «چرخش» پایان نوردهی میکند و بلافاصله مرحلهی پیشنوردهی را برای فریم بعدی آغاز میکند - باز هم، این مرحله باید در تاریکی اتفاق بیفتد.
اگر منبع نور توسط یک سیگنال تریگر خارجی فعال شود، میتوان از این سیگنال برای فعال کردن دریافت تصویر توسط دوربین نیز استفاده کرد که امکان راهاندازی سختافزار سادهتر و راحتتر را فراهم میکند. از طرف دیگر، اگر منبع نور یک سیگنال تریگر برای نشان دادن روشن بودن خود ارسال کند، میتوان از آن برای فعال کردن دریافت تصویر توسط دوربین استفاده کرد.
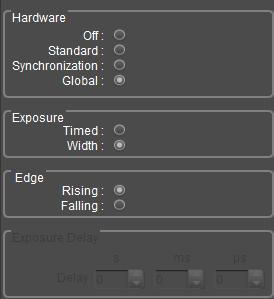
تنظیمات نوردهی
مدت زمان نوردهی دوربین را میتوان یا توسط نرمافزار یا توسط سختافزار خارجی از طریق مدت زمان سیگنال تریگر کنترل کرد. دو تنظیم برای نوردهی وجود دارد:
زمانبندی شده:نوردهی دوربین توسط نرمافزار تنظیم میشود.
عرضمدت زمان سیگنال بالا (در حالت لبه بالا رونده) یا سیگنال پایین (در حالت لبه پایین رونده) برای تعیین مدت زمان نوردهی دوربین استفاده میشود. این حالت گاهی اوقات به عنوان تریگر «سطح» یا «لامپ» نیز شناخته میشود.
تنظیم لبه
بسته به تنظیمات سختافزاری شما، دو گزینه برای این تنظیم وجود دارد:
در حال افزایش: دریافت تصویر دوربین توسط لبهی رو به افزایش سیگنال از پایین به بالا فعال میشود.
افتادن:دریافت تصویر توسط دوربین توسط لبه پایین رونده سیگنال بالا به پایین آغاز میشود.
تنظیم تأخیر
میتوان از لحظه دریافت تریگر تا شروع نوردهی دوربین، یک تأخیر اضافه کرد. این تأخیر را میتوان بین ۰ تا ۱۰ ثانیه تنظیم کرد و مقدار پیشفرض آن ۰ ثانیه است.
نکتهای در مورد زمانبندی فعالسازی: مطمئن شوید که فعالسازیها از قلم نیفتند.
در هر حالت، مدت زمان بین فعالسازیها (که از مدت زمان سیگنال بالا به علاوه سیگنال پایین بدست میآید) باید به اندازه کافی طولانی باشد تا دوربین دوباره آماده دریافت تصویر شود. در غیر این صورت، فعالسازیهایی که قبل از آماده شدن مجدد دوربین برای دریافت تصویر ارسال میشوند، نادیده گرفته میشوند.
برای اطلاع از الزامات زمانبندی آن حالت، توضیحات حالتهای بالا را بررسی کنید.
حالتها و تنظیمات فعالسازی
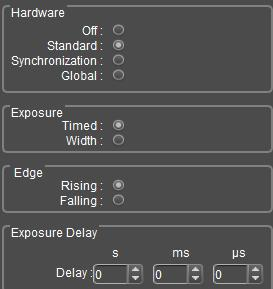
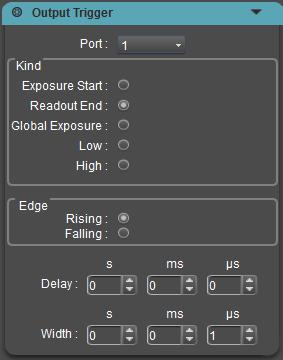
با اتصال کابلهای Trigger Out بین سختافزار خارجی و پورت(های) Trigger Out دوربین، همانطور که در بخش «نمودارهای کابل Trigger و Pin-out» در بالا نشان داده شده است، آماده پیکربندی دوربین برای خروجی سیگنالهای Trigger مناسب برای تنظیمات خود هستید. تنظیمات لازم برای پیکربندی این مورد باید در بسته نرمافزاری شما موجود باشد. تصویر زیر نحوه نمایش این تنظیمات در نرمافزار Mosaic شرکت Tucsen را نشان میدهد.
پورتهای فعالسازی
دوربینهای sCMOS توسن دارای سه پورت Trigger Out هستند که هر کدام پین Trigger Out مخصوص به خود را دارند - TRIG.OUT1، TRIG.OUT2 و TRIG.OUT3. هر کدام میتوانند به طور مستقل پیکربندی شوند، به طور مستقل عمل کنند و به دستگاههای خارجی جداگانه متصل شوند.
نوع فعالسازی
پنج گزینه برای اینکه خروجی تریگر چه مرحلهای از عملکرد دوربین را نشان دهد، وجود دارد:
شروع نوردهیدر لحظهای که نوردهی در ردیف اول فریم شروع میشود، یک تریگر (از پایین به بالا در مورد تریگرهای «Rising Edge») ارسال میکند. عرض سیگنال تریگر با تنظیم «Width» تعیین میشود.
پایان بازخوانینشان میدهد که چه زمانی آخرین ردیف دوربین، خوانش خود را به پایان میرساند. عرض سیگنال تریگر با تنظیم «عرض» تعیین میشود.
قرار گرفتن در معرض دید جهانیمرحلهای از نوردهی را نشان میدهد که در طی آن، تمام ردیفهای دوربین، پس از «چرخش» شروع نوردهی و قبل از «چرخش» پایان نوردهی و بازخوانی، به طور همزمان نوردهی میکنند. اگر برای کنترل منبع نور یا رویداد دیگری در آزمایش خود استفاده کنید، میتواند یک «شاتر شبه سراسری» ایجاد کند. این امر امکان دریافت همزمان دادهها از طریق حسگر دوربین را بدون تأثیر شاتر چرخشی sCMOS فراهم میکند. برای اطلاعات بیشتر در مورد شاتر شبه سراسری، به بخش «شاتر شبه سراسری» در زیر مراجعه کنید.
بالا: این حالت باعث میشود که پین یک سیگنال ثابت بالا را خروجی دهد.
کم:این حالت باعث میشود که پین یک سیگنال ثابت پایین را خروجی دهد.
لبه ماشه
این قطبیت ماشه را تعیین میکند:
در حال افزایش:لبه بالارونده (از ولتاژ پایین به ولتاژ بالا) برای نشان دادن رویدادها استفاده میشود.
افتادن:لبه پایین رونده (از ولتاژ بالا به پایین) برای نشان دادن رویدادها استفاده میشود.
تأخیر
میتوان یک تأخیر قابل تنظیم به زمانبندی تریگر اضافه کرد که تمام سیگنالهای رویداد Trigger Out را تا زمان مشخص شده، از ۰ تا ۱۰ ثانیه، به تأخیر میاندازد. این تأخیر به طور پیشفرض روی ۰ ثانیه تنظیم شده است.
عرض ماشه
این، پهنای سیگنال تریگر مورد استفاده برای نشان دادن رویدادها را تعیین میکند. پهنای پیشفرض ۵ میلیثانیه است و میتوان آن را بین ۱ میکروثانیه تا ۱۰ ثانیه تنظیم کرد.
کرکرههای شبه سراسری
برای برخی از کاربردهای تصویربرداری، عملکرد دوربین شاتر چرخشی میتواند باعث ایجاد مصنوعات، ناکارآمدی در زمانبندی یا دوز نور به نمونه یا تداخل بین تصاویر شود که در آن تغییرات سختافزاری بین فریمها رخ میدهد. عملکرد شبهسراسری میتواند بر این چالشها غلبه کند.
چگونهشبه گلوبالل شاتر ورکس
با شروع نوردهی یک فریم، شروع نوردهی برای هر ردیف در دوربین به صورت «غلتان» (roll) انجام میشود تا زمانی که هر ردیف نوردهی شود. اگر در طول این فرآیند، منبع نور خاموش شود و هیچ نوری به دوربین نرسد، هیچ اطلاعاتی در طول مرحله «غلتان» دریافت نخواهد شد. به محض اینکه نوردهی هر ردیف شروع شد، دوربین اکنون به صورت «سراسری» رفتار میکند و هر قسمت از دوربین آماده دریافت نور بدون هیچ گونه گذر زمانی از حسگر است.
اگر منبع نور یک بار دیگر خاموش شود در حالی که «غلتان» پایان نوردهی و خوانش هر ردیف در حسگر به سمت پایین حرکت میکند، بار دیگر هیچ اطلاعاتی در این مرحله غیرکلی به دست نمیآید.
بنابراین مدت زمان پالس منبع نور، نوردهی مؤثر دوربین، یعنی زمانی که نور جمعآوری میشود، را تعیین میکند.
دوربینهای sCMOS توسن میتوانند از دو طریق به شاتر شبه سراسری دست یابند: یا از طریق فعال کردن دوربین و یک منبع نور از طریق زمانبندی خارجی (به بخش تنظیمات سختافزاری فعالسازی: سراسری در بالا مراجعه کنید)، یا از طریق کنترل یک منبع نور قابل فعالسازی از طریق پورتهای خروجی فعالسازی دوربین که روی نوع خروجی فعالسازی: سراسری تنظیم شدهاند.
زمانبندی برای عملیات جهانی
توجه داشته باشید که هنگام کار با شاتر شبه سراسری، نرخ فریم دوربین به دلیل نیاز به گنجاندن مرحله بازخوانی/شروع نوردهی در بین فریمها کاهش مییابد. مدت زمان این مرحله توسط زمان بازخوانی دوربین تنظیم میشود، به عنوان مثال حدود ۴۲ میلیثانیه برای فریم کامل یک دوربین Dhyana 95.
زمان کل هر فریم از این زمان فریم، به علاوه زمان نوردهی «کلی»، به علاوه هرگونه تأخیر بین پایان بازخوانی فریم قبلی و شروع دریافت فریم بعدی، به دست میآید.








