
 21/01/2026
21/01/2026En la obtención de imágenes científicas y la inspección industrial modernas, el tiempo ya no es un atributo secundario, sino una dimensión fundamental de cómo se desarrollan los experimentos, cómo se coordinan los dispositivos y cómo se interpretan los datos.
Una marca de tiempo determina cuándo se captura cada fotograma, lo que influye en todo, desde la reproducibilidad del experimento hasta la sincronización entre múltiples dispositivos y la validez de los análisis posteriores.
La capacidad de una cámara para ofrecer marcas de tiempo deterministas, de alta precisión y con baja fluctuación es ahora un indicador clave de sus capacidades profesionales.
01 | ¿Qué es una marca de tiempo?
Una marca de tiempo es un marcador digital que registra latiempo de captura realde cada fotograma de la imagen. Dependiendo del sistema, su precisión puede variar desde segundos hasta milisegundos, microsegundos o incluso nanosegundos.
Formatos comunes de marcas de tiempo
| Tipo | Formato de ejemplo | Descripción |
| Marca de tiempo UNIX (numérica) | 1733558400 (segundos) / 1733558400123 (ms) | Tiempo transcurrido desde el 1 de enero de 1970 UTC |
| ISO 8601 (formato legible) | 2025-12-07T12:30:45Z / +08:00 | Fecha, hora y zona horaria estándar |
| Superposición de marca de tiempo incrustada | 07/12/2025 12:30:45 | Marca de tiempo visible para el usuario en la propia imagen. |
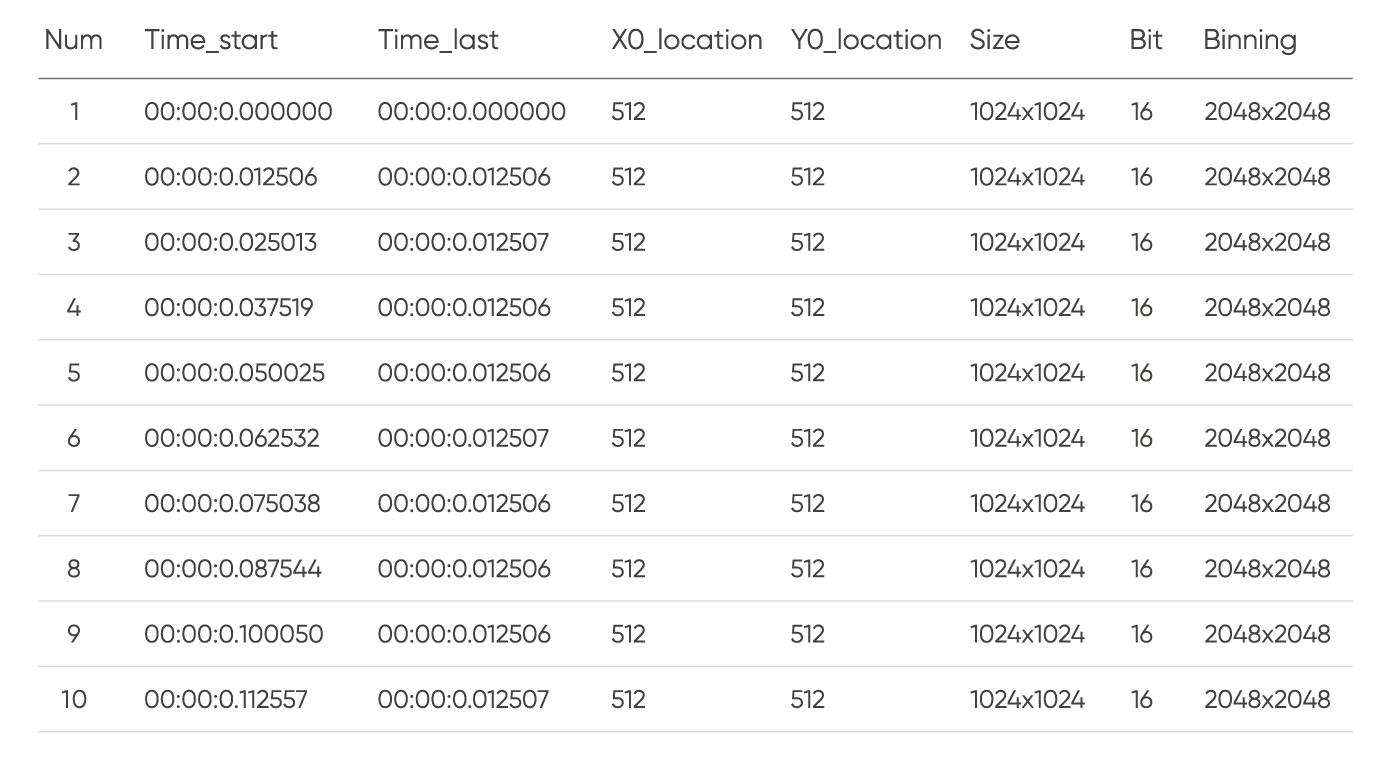
Archivos de ejemplo de la cámara Tucsen con marca de tiempo
02 | Marcas de tiempo de software frente a marcas de tiempo de hardware
Las marcas de tiempo del software se generan después de que el PC recibe los datos de la imagen, mientras que las marcas de tiempo del hardware se generan dentro de la cámara en el momento exacto de la exposición.
La diferencia entre ambos puede afectar significativamente la precisión temporal, la fiabilidad de la sincronización y la integridad de las mediciones dinámicas.
1. Marcas de tiempo del software
Las marcas de tiempo del software son generadas por el controlador o la aplicación del PC una vez que la imagen ha llegado al host. Reflejan la hora de llegada de los datos, no el tiempo de exposición.
Ventajas: Universal y fácil de implementar.
• Independiente del diseño del hardware de la cámara
• Funciona con todas las interfaces principales (USB, GigE, CameraLink, etc.)
• Fácil de generar a partir de la hora del sistema en el software.
• Muy adecuado para el desarrollo, la depuración y el registro rápidos.
• Bajo coste de integración y alta compatibilidad
Limitaciones: No apto para sincronización de precisión.
Las marcas de tiempo del software se ven afectadas por toda la cadena de transmisión de datos:
Cámara → Interfaz (USB/GigE/CXP) → Controlador de host → Programación del sistema operativo → Aplicación
Cualquier retraso, almacenamiento en búfer o evento de planificación de la CPU puede introducir un error no determinista a nivel de milisegundos.
A medida que la velocidad de fotogramas supera los ~50 fps, estas variaciones crecen rápidamente y pueden comprometer gravemente la fiabilidad de la marca de tiempo.
Casos de uso típicos (Imágenes de baja velocidad (<30 fps)
| Escenario de aplicación | Función del software Marca de tiempo |
Cámaras recomendadas
|
| Microscopía biológica (fluorescencia de rutina / imágenes de tejidos) | Gestión de datos, clasificación de marcos, alineación en software de análisis |
|
| Microscopía industrial (inspección de materiales / metalografía) | Admite el seguimiento de lotes, la trazabilidad de imágenes y el registro básico de control de calidad. |
2. Marcas de tiempo del hardware
Las marcas de tiempo del hardware se generan dentro del FPGA o los circuitos de temporización de la cámara en el momento exacto de inicio o finalización de la exposición. Representan el tiempo real de adquisición física, sin verse afectadas por la latencia de transmisión o del sistema operativo.
Ventajas: Alta precisión y sincronización determinista.
Las marcas de tiempo del hardware ofrecen:
• Precisión de microsegundos (µs) a submicrosegundos
• Dependencia nula de la sincronización de la transmisión de datos.
• Salidas estables, repetibles y sin fluctuaciones.
• Correspondencia 1:1 con la temporización real de la exposición del sensor.
Esto las convierte en elementos esenciales para la obtención de imágenes de alta velocidad, experimentos sincronizados y mediciones que requieren una sincronización precisa.
Limitaciones: dependen del hardware y del diseño.
Las marcas de tiempo del hardware requieren:
• Lógica de temporización de precisión en FPGA/ASIC
• Osciladores de alta estabilidad (TCXO/OCXO)
• Sincronización precisa de la exposición y compensación de retardo
• Codificación de flujo de datos sincronizada
• Consistencia con los formatos de análisis del SDK/controlador
Debido a que las implementaciones varían entre los fabricantes, la integración entre sistemas puede requerir una calibración adicional o una revisión de la documentación.
El coste y la complejidad del desarrollo son mayores que las marcas de tiempo del software.
Aplicaciones típicas de alta velocidad (>50 fps)
| Aplicaciones | Cómo ayudan las marcas de tiempo del hardware | Cámaras recomendadas |
| Ciencias de la vida(Imágenes de calcio o voltaje de alta velocidad) | Registra los tiempos de exposición reales; sincroniza los láseres mediante Trigger Out. |
|
| Ciencias físicas(captura de movimiento de alta velocidad) | Proporciona una sincronización absoluta a nivel de microsegundos para una reconstrucción precisa de la trayectoria. | |
| Inspección de semiconductores (Inspección de obleas y paneles) | Sincronización de cámara basada en marcas de tiempo; permite el mapeo de tiempo y posición basado en codificador. | |
| Integración de instrumentos(cámara + láser + plataforma motorizada) | Sirve como referencia de tiempo absoluta para todo el sistema; permite la coordinación a nivel de microsegundos. |








