
 2022/06/15
2022/06/15يُعدّ التقاط الضوء غير المركز تحديًا أمام الحصول على صور واضحة وعالية التباين في العديد من تطبيقات التصوير. يوفر المجهر الضوئي الرقمي الماسح (DSLM) طريقة فعّالة للحدّ من التقاط الضوء غير المركز من خلال مزامنة الإضاءة مع "الغالق الدوار" لكاميرات CMOS الحديثة. مع ذلك، تتطلب هذه المزامنة الدقيقة تحكمًا كاملًا في تشغيل الغالق الدوار للكاميرا، وهي ميزة توفرها كاميرات Tucsen المزودة بوضع التحكم في الغالق الدوار.
ما هو نظام الغالق الدوار؟
الغالق هو الجزء المسؤول عن بدء وإيقاف تعريض الكاميرا للضوء. في السابق، كانت الكاميرات العلمية تستخدم غالقًا ميكانيكيًا، يُفتح لالتقاط الصورة ويُغلق لإنهاء التعريض. كانت الغالق الميكانيكية بطيئة وعرضة لمشاكل في الموثوقية مع الاستخدام المطول. أما الآن، فتستخدم الكاميرات العلمية غالقًا إلكترونيًا، وهو أسرع وأبسط وأكثر تنوعًا بشكل ملحوظ.
تبدأ كاميرات الغالق الدوار عملية التقاط الصور من أعلى المستشعر، ثم تنتقل الصور تدريجيًا سطرًا تلو الآخر إلى أسفل المستشعر. تتضمن هذه العملية ثلاث مراحل: إعادة ضبط الإشارة، والتعريض للضوء، وقراءة البيانات.
تبدأ عملية تصوير كل صف بإعادة ضبط إشارة كل بكسل. بعد انقضاء وقت التصوير المحدد للصف العلوي، ينتقل مؤشر القراءة، الذي يُشير إلى نهاية عملية التصوير، إلى الأسفل بنفس الطريقة. ينتج عن ذلك منطقة من البكسلات النشطة تمتد من أعلى الكاميرا إلى أسفلها، ويتحدد ارتفاعها بطول وقت التصوير. عند تشغيل الكاميرا بأقصى سرعة، يتراوح التأخير لكل سطر عادةً بين 5 و25 ميكروثانية لكل سطر من البكسلات، وذلك حسب سرعة الكاميرا.
للاستفادة من التقنيات البصرية التي تتطلب تزامن مسح الإضاءة مع الغالق الدوار للكاميرا، يكون هذا التأخير عادةً قصيرًا جدًا، مما يعني أن الغالق الدوار يعمل بسرعة كبيرة جدًا بحيث لا تستطيع الأجهزة الأخرى مواكبته. وهنا يأتي دور وضع التحكم بالغالق الدوار.
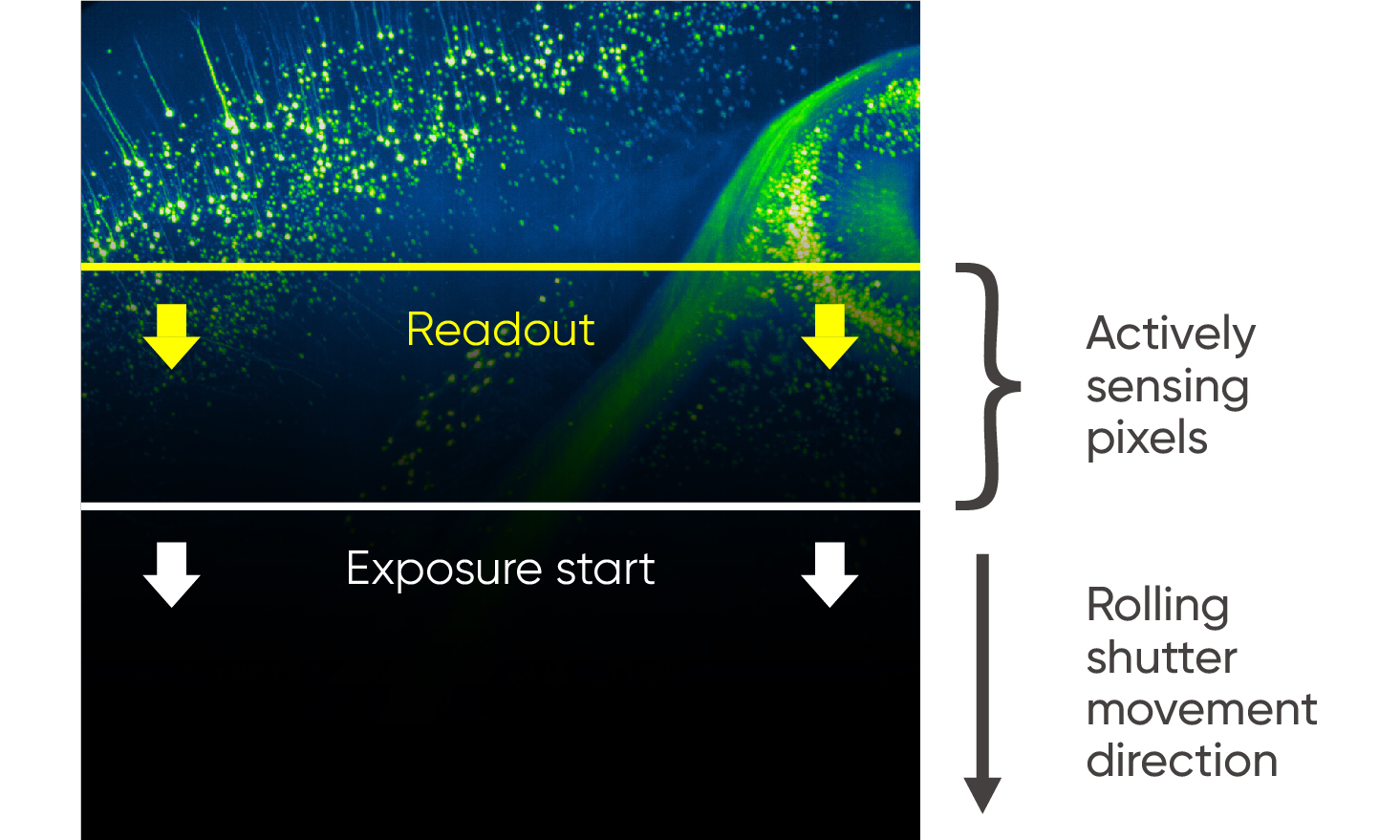
الشكل 1: رسم تخطيطي لعملية تشغيل المصراع الدوار
كيف يعمل وضع التحكم في الغالق الدوار
بفضل تقنية الذكاء المدمجة في كاميرات توكسن، يمكن ضبط آلية الغالق الدوار للكاميرا بدقة متناهية لتتزامن مع الأجهزة الخارجية. ومن خلال إضافة تأخير بسيط بين إعادة الضبط وقراءة كل سطر، يمكن التحكم في الوقت الذي تستغرقه منطقة البكسل النشطة لمسح المستشعر، مما يسمح بهذا التزامن.
علاوة على ذلك، يمكن ضبط "ارتفاع الشق" للمنطقة النشطة الممسوحة ضوئيًا بدقة. يؤدي طول مدة التعريض أو قصر زمن تأخير الخط إلى زيادة ارتفاع الشق. في حالة المجهر الرقمي الماسح الضوئي (DSLM)، يمكن استخدام ذلك لمطابقة المنطقة المضاءة من العينة فقط، مما يحقق توازنًا بين تعريض البكسلات لأقصى مدة ممكنة لالتقاط الإشارة بفعالية، وتقليل الضوء غير المركز.
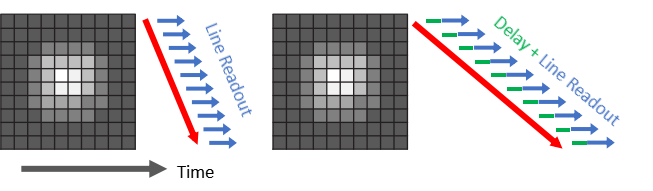
شكل2اليسار: رسم تخطيطي لعملية الغالق الدوار عند سرعة الكاميرا الكاملة. اليمين: رسم تخطيطي يوضح سرعة الغالق الدوار مع وضع التحكم بالغالق الدوار الذي يضيف تأخيرًا إضافيًا بين كل سطر للسماح بالمزامنة مع الأجهزة الأخرى.
مع هذا التأخير الاختياري، هناك الآن ثلاثة متغيرات مهمة يجب فهمها والتي تحدد تشغيل الغالق الدوار، مما يشير إلى ارتفاع منطقة البكسلات "النشطة"، ومدى سرعة اجتيازها للمستشعر.
وقت الخطهذا هو الوقت الافتراضي الذي يستغرقه المستشعر لقراءة صف واحد والانتقال إلى الصف التالي. وهو يحدد "السرعة" الأصلية لمستشعر الكاميرا، ويمكن تحديده في برنامج الكاميرا، أو تقريبه لمنطقة اهتمام معينة (ROI) ووضع كاميرا معين من خلال:

حيث يشير مصطلح "الحد الأقصى لمعدل إطارات الكاميرا" إلى معدل الإطارات عندما لا يكون محدودًا بطول وقت التعريض أو معدل التشغيل الخارجي.
وقت التعرض:يحدد هذا المدة التي يكون فيها كل صف من البكسل نشطًا، وبالتالي يحدد ارتفاع المنطقة النشطة لوقت خط معين ووقت تأخير معين.
تأخير وقت الخط:هذا هو مقدار التأخير الإضافي الذي يضيفه وضع التحكم في الغالق الدوار. يسمح وضع التحكم في الغالق الدوار بإضافة التأخير.بمضاعفات صحيحة لوقت الخطعلى سبيل المثال، إذا كان زمن الخط للكاميرا 10 ميكروثانية، فإن التأخير الإضافي لكل خط هو 1 أو 2 أو...يمكن إضافة ما يصل إلى 8928، مما يشير إلى عدد مضاعفات 10 ميكروثانية.
ومن المهم أيضًا ارتفاع منطقة الاهتمام (ROI) المستخدمة، حيث سيحدد ذلك عدد الخطوط التي يجب أن تمسحها المنطقة النشطة قبل إعادة التعيين.
أوضاع مزامنة وضع التحكم في الغالق الدوار
يوجد وضعان للتشغيل في وضع التحكم في الستائر الدوارة، وذلك حسب المتغير الأكثر أهمية للتحكم فيه.
In وضع تأخير وقت الخطيمكنك ضبط وقت التأخير كما هو موضح أعلاه. بعد ذلك، يمكن للبرنامج أن يُشير، بالنسبة لوقت التعريض المحدد، إلى ارتفاع الفتحة الناتج - أي ارتفاع البكسلات النشطة في الغالق الدوار.
In ارتفاع البكسل النشط / ارتفاع الفتحةفي هذا الوضع، يمكنك تحديد عدد صفوف المستشعر التي ترغب في تفعيلها أثناء مسح الغالق الدوار. سيتم استخدام وقت التعريض الذي حددته لحساب تأخير الخط المطلوب لتوفير ارتفاع الفتحة هذا تلقائيًا.
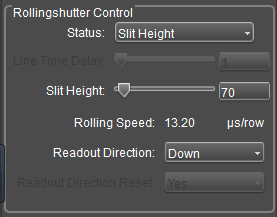
إعداد وضع التحكم في الغالق الدوار في البرنامج
عناصر التحكم في وضع التشغيل (الحالة)
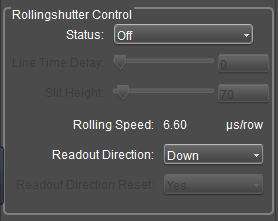
الشكل 3: مثال على واجهة التحكم في وضع التحكم في الستائر الدوارة من برنامج Tucsen Mosaic. جميع الخيارات متوفر عبر Micro-Manager و SDK.
تتوفر ثلاثة أوضاع تشغيلية:Off, تأخير وقت الخط, ارتفاع الفتحة.
• عند ضبطه علىعن، يتصرف المستشعر بشكل طبيعي دون إضافة أي تأخير إضافي.
• عند ضبطه علىتأخير وقت الخطفي الوضع، يمكنك تحديد تأخير وقت الخط بوحدات وقت الخط، كما هو موضح أعلاه.
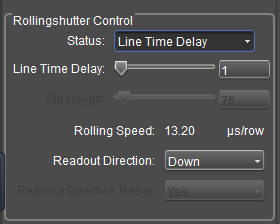
الشكل 4: خيارات برنامج تأخير وقت الخط. مثالواجهة من برنامج Tucsen Mosaic. جميع الخيارات متاحة عبر Micro-Manager وSDK.
يختلف عدد دورات زمن الخط التي يمكن إضافتها إلى التأخير القابل للتكوين من كاميرا إلى أخرى. ويكون زمن الخط الجديد للكاميرا، بعد إضافة التأخير، كما يلي:
زمن الفاصل الزمني بين الخطوط = زمن الخط(مستشعر)+ (وقت الخط)(مستشعر)× تأخير وقت الخط
قيمة المعامل لـسرعة التدحرجيساويفاصل زمني بين الخطوط.
إذن، يكون إجمالي وقت قراءة الصورة كما يلي:
Rاقرأوقت الاستراحة(صورة)= وقت الفاصل الزمني بين الأسطر×Nصفوف.
Nصفوفيمثل العدد الإجمالي لصفوف وحدات البكسل في منطقة الاهتمام. يعتمد معدل الإطارات عند التصوير في هذا الوضع على عدد الخطوط المراد تصويرها وزمن دورة الخط.
معدل الإطارات = 1 / (زمن القراءة)(صورة)+ وقت التعريض)
•عند ضبطه علىارتفاع الفتحة mيمكنك ضبط odeحجم المنطقة النشطة التي تم مسحها ضوئيًا، ويُعطى بواسطة tعدد صفوف البكسل بين إشارة "إعادة الضبط" وإشارة "القراءة".يتراوح ارتفاع الفتحة بين 1 و2048 بكسل. لتحويل هذا إلى حجم فعلي، اضرب هذه القيمة في حجم البكسل المذكور في ورقة مواصفات الكاميرا.
الشكل 5: خيارات التحكم في وضع ارتفاع الفتحة. مثالواجهة من برنامج Tucsen Mosaic. جميع الخيارات متاحة عبر Micro-Manager وSDK.
سيقوم البرنامج تلقائيًا بحساب وقت تأخير الخط ووقت فاصل الخط المطلوبين، والصيغة كالتالي:
تأخير وقت الخط = وقت التعريض(أسطر)/ ارتفاع الفتحة(أسطر)
في وضع السرعة العالية (وضع كسب الكاميرا)، لا يمكن ضبط نطاق ارتفاع الفتحة إلا على عدد زوجي، حيث تُقرأ الخطوط في هذا الوضع اثنين اثنين. تُحسب المعلمات في وضع السرعة العالية كما يلي.
تأخير وقت الخط = وقت التعريض(أسطر)/ ارتفاع الفتحة ½(أسطر)
ارتفاع الفتحة = (وقت التعرض(أسطر)(÷ تأخير وقت الخط) × 2
عناصر التحكم في اتجاه المسح
هناك ثلاثة خيارات لاتجاه الستارة الدوارة:
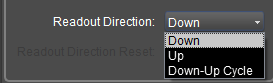
Dملكاتجاه المسح لأسفل هو اتجاه المسح الافتراضي لكاميرات sCMOS. يبدأ الغالق الدوار من الصف الأول في أعلى المستشعر ويمسح لأسفل حتى الصف الأخير في الأسفل. تبدأ كل عملية التقاط إطار لاحقة من الصف الأول في الأعلى.
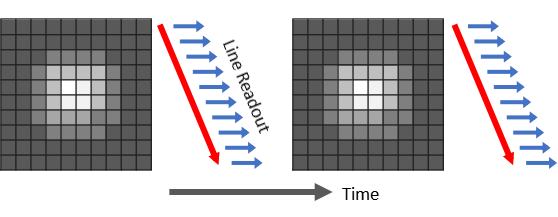
الشكل 6: رسم تخطيطي لوضع المسح الهابط
Up":"في وضع المسح التصاعدي، يبدأ الغالق الدوار من الصف السفلي ويمسح حتى الصف العلوي من الصف الأول. تبدأ كل عملية التقاط إطار لاحقة من الصف السفلي. على الرغم من أن ترتيب التقاط البيانات على الكاميرا معكوس الآن، إلا أن الصورة الناتجة التي تُرسل إلى البرنامج ستظل تُظهر الاتجاه الأصلي، أي أن الصورة لن تُقلب عموديًا مقارنةً بوضع المسح التنازلي.
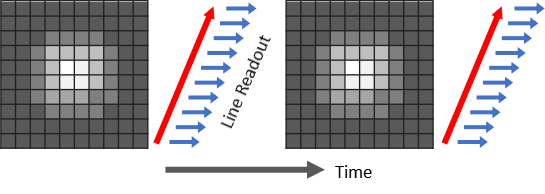
الشكل 7: رسم تخطيطي لوضع المسح الصاعد
دورة الصعود والهبوطعند المسح بالتناوب لأعلى ولأسفل، يبدأ الغالق الدوار من الصف الأول في الأعلى وينزل إلى الصف الأخير في الأسفل. في الإطار التالي، يبدأ الغالق الدوار من الصف السفلي ويمسح لأعلى حتى الصف العلوي، وهكذا. يكون اتجاه الصورة الملتقطة في هذا الوضع مماثلاً لاتجاه المسح لأسفل.

الشكل 8: مخطط وضع المسح الضوئي لدورة الصعود والهبوط
• Reaإعادة ضبط اتجاه عدم الاتصال
هذه الوظيفة متاحة فقط في وضع دورة الصعود والهبوط.
الإعداد الافتراضي لهذه المعلمة هو "نعم"، مما يضمن أن الإطار الأول من كل تسلسل اكتساب جديد سيبدأ من الصف العلوي ويمسح لأسفل.
عند ضبط هذا الخيار على "لا"، سيبدأ الإطار الأول من كل عملية تصوير جديدة من موضع الإطار الأخير في التسلسل السابق. إذا انتهى الإطار الأخير في الصف السفلي، فسيبدأ الإطار الأول من عمليات التصوير اللاحقة من الصف السفلي وينتقل إلى الأعلى.











