 ૨૫/૦૯/૧૧
૨૫/૦૯/૧૧વાયરલેસ કોમ્યુનિકેશનથી લઈને ડિજિટલ ફોટોગ્રાફી સુધીની કોઈપણ માપન પ્રણાલીમાં - સિગ્નલ-ટુ-નોઈઝ રેશિયો (SNR) ગુણવત્તાનો મૂળભૂત માપદંડ છે. ભલે તમે ટેલિસ્કોપ છબીઓનું વિશ્લેષણ કરી રહ્યા હોવ, માઇક્રોફોન રેકોર્ડિંગમાં સુધારો કરી રહ્યા હોવ, અથવા વાયરલેસ લિંકનું મુશ્કેલીનિવારણ કરી રહ્યા હોવ, SNR તમને જણાવે છે કે અનિચ્છનીય પૃષ્ઠભૂમિ અવાજમાંથી કેટલી ઉપયોગી માહિતી અલગ પડે છે.
પરંતુ SNR ની યોગ્ય ગણતરી કરવી હંમેશા સરળ હોતી નથી. સિસ્ટમ પર આધાર રાખીને, ડાર્ક કરંટ, રીડ નોઇઝ અથવા પિક્સેલ બિનિંગ જેવા વધારાના પરિબળોને ધ્યાનમાં લેવાની જરૂર પડી શકે છે. આ માર્ગદર્શિકા તમને સિદ્ધાંત, મુખ્ય સૂત્રો, સામાન્ય ભૂલો, એપ્લિકેશનો અને SNR ને સુધારવા માટેના વ્યવહારુ રસ્તાઓ દ્વારા માર્ગદર્શન આપે છે, ખાતરી કરે છે કે તમે તેને વિવિધ સંદર્ભોમાં સચોટ રીતે લાગુ કરી શકો છો.
સિગ્નલ-ટુ-નોઈઝ રેશિયો (SNR) શું છે?
તેના મૂળમાં, સિગ્નલ-ટુ-નોઈઝ રેશિયો ઇચ્છિત સિગ્નલની મજબૂતાઈ અને તેને અસ્પષ્ટ કરતા પૃષ્ઠભૂમિ અવાજ વચ્ચેના સંબંધને માપે છે.
● સિગ્નલ = અર્થપૂર્ણ માહિતી (દા.ત., કોલમાં અવાજ, ટેલિસ્કોપની છબીમાં તારો).
● ઘોંઘાટ = રેન્ડમ, અનિચ્છનીય વધઘટ જે સિગ્નલને વિકૃત કરે છે અથવા છુપાવે છે (દા.ત., સ્ટેટિક, સેન્સર અવાજ, વિદ્યુત હસ્તક્ષેપ).
ગાણિતિક રીતે, SNR ને આ રીતે વ્યાખ્યાયિત કરવામાં આવે છે:

કારણ કે આ ગુણોત્તર ઘણા બધા ક્રમમાં બદલાઈ શકે છે, SNR સામાન્ય રીતે ડેસિબલ્સ (dB) માં વ્યક્ત થાય છે:
● ઉચ્ચ SNR (દા.ત., 40 dB): સિગ્નલ પ્રભુત્વ ધરાવે છે, જેના પરિણામે સ્પષ્ટ અને વિશ્વસનીય માહિતી મળે છે.
● ઓછું SNR (દા.ત., 5 dB): અવાજ સિગ્નલને ભારે કરી નાખે છે, જેના કારણે અર્થઘટન મુશ્કેલ બને છે.
SNR ની ગણતરી કેવી રીતે કરવી
સિગ્નલ-ટુ-નોઈઝ રેશિયોની ગણતરી કયા અવાજ સ્ત્રોતોનો સમાવેશ થાય છે તેના આધારે ચોકસાઈના વિવિધ સ્તરો સાથે કરી શકાય છે. આ વિભાગમાં, બે સ્વરૂપો રજૂ કરવામાં આવશે: એક જે શ્યામ પ્રવાહ માટે જવાબદાર છે અને બીજું જે ધારે છે કે તેને અવગણી શકાય છે.
નોંધ: સ્વતંત્ર અવાજ મૂલ્યો ઉમેરવા માટે તેમને ચતુષ્કોણમાં ઉમેરવા જરૂરી છે. અવાજના દરેક સ્ત્રોતનો વર્ગ, સારાંશ અને કુલનો વર્ગમૂળ લેવામાં આવે છે.
ઘેરા પ્રવાહ સાથે સિગ્નલ-થી-અવાજ ગુણોત્તર
જ્યાં ઘેરા પ્રવાહનો અવાજ સમાવેશની જરૂર પડે તેટલો મોટો હોય ત્યાં ઉપયોગમાં લેવા માટે નીચે મુજબનું સમીકરણ છે:

અહીં શબ્દોની વ્યાખ્યા છે:
સિગ્નલ (e-): આ ફોટોઈલેક્ટ્રોનમાં રસનો સંકેત છે, જેમાં ઘેરા પ્રવાહના સિગ્નલને બાદ કરવામાં આવે છે.

કુલ સિગ્નલ (e-) એ રસના પિક્સેલમાં ફોટોઇલેક્ટ્રોન ગણતરી હશે - ગ્રે સ્તરના એકમોમાં પિક્સેલ મૂલ્ય નહીં. સમીકરણના તળિયે સિગ્નલ (e-) નું બીજું ઉદાહરણ, ફોટોનશોટ અવાજ છે.
ઘેરો પ્રવાહ (DC):તે પિક્સેલ માટે ઘેરા પ્રવાહનું મૂલ્ય.
t: એક્સપોઝર સમય સેકન્ડમાં
σr:કેમેરા મોડમાં અવાજ વાંચો.
નગણ્ય શ્યામ પ્રવાહ માટે સિગ્નલ-થી-અવાજ ગુણોત્તર
ટૂંકા ગાળાના કિસ્સાઓમાં (< 1 સેકન્ડ) એક્સપોઝર સમય, વત્તા ઠંડા, ઉચ્ચ-પ્રદર્શન કેમેરા, શ્યામ પ્રવાહનો અવાજ સામાન્ય રીતે વાંચન અવાજ કરતા ઘણો ઓછો હશે, અને સલામત રીતે અવગણવામાં આવશે.
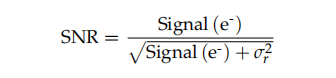
જ્યાં પદો ફરી એકવાર ઉપર વ્યાખ્યાયિત કર્યા મુજબ છે, અપવાદ સિવાય કે ડાર્ક કરંટ સિગ્નલની ગણતરી કરવાની અને સિગ્નલમાંથી બાદ કરવાની જરૂર નથી કારણ કે તે શૂન્ય બરાબર હોવું જોઈએ.
આ સૂત્રોની મર્યાદાઓ અને ગુમ થયેલ પદો
વિરુદ્ધ સૂત્રો ફક્ત CCD માટે સાચા જવાબો આપશે અનેCMOS કેમેરા. EMCCD અને તીવ્ર ઉપકરણો વધારાના અવાજ સ્ત્રોતો રજૂ કરે છે, તેથી આ સમીકરણોનો ઉપયોગ કરી શકાતો નથી. વધુ સંપૂર્ણ સિગ્નલ-ટુ-અવાજ ગુણોત્તર સમીકરણ માટે જે આ અને અન્ય યોગદાન માટે જવાબદાર છે.
SNR સમીકરણોમાં સામાન્ય રીતે સમાવવામાં આવતો (અથવા ઉપયોગમાં લેવાતો) બીજો અવાજ શબ્દ ફોટો-રિસ્પોન્સ નોન-યુનિફોર્મિટી (PRNU) છે, જેને ક્યારેક 'ફિક્સ્ડ પેટર્ન નોઇઝ' (FPN) પણ કહેવામાં આવે છે. આ સેન્સરમાં ગેઇન અને સિગ્નલ પ્રતિભાવની અસમાનતા દર્શાવે છે, જે જો પૂરતા મોટા હોય તો ઉચ્ચ સિગ્નલો પર પ્રબળ બની શકે છે, જે SNR ઘટાડે છે.
જ્યારે શરૂઆતના કેમેરામાં PRNUનો સમાવેશ કરવા માટે પૂરતો નોંધપાત્ર સમાવેશ થતો હતો, ત્યારે મોટાભાગના આધુનિકવૈજ્ઞાનિક કેમેરાખાસ કરીને ઓન-બોર્ડ સુધારા લાગુ કર્યા પછી, ફોટોન શોટ અવાજ કરતા ઘણું ઓછું PRNU પ્રદાન કરવા માટે પૂરતું ઓછું છે. તેથી, હવે, સામાન્ય રીતે SNR ગણતરીઓમાં તેની અવગણના કરવામાં આવે છે. જો કે, PRNU હજુ પણ કેટલાક કેમેરા અને એપ્લિકેશનો માટે મહત્વપૂર્ણ છે, અને સંપૂર્ણતા માટે વધુ અદ્યતન SNR સમીકરણમાં શામેલ છે. આનો અર્થ એ છે કે પૂરા પાડવામાં આવેલ સમીકરણો મોટાભાગની CCD/CMOS સિસ્ટમો માટે ઉપયોગી છે પરંતુ તેને સાર્વત્રિક રીતે લાગુ પડતું નથી.
SNR ગણતરીઓમાં અવાજના પ્રકારો
SNR ની ગણતરી ફક્ત એક જ અવાજ મૂલ્ય સામે સિગ્નલની તુલના કરવા વિશે નથી. વ્યવહારમાં, બહુવિધ સ્વતંત્ર અવાજ સ્ત્રોતો ફાળો આપે છે, અને તેમને સમજવું જરૂરી છે.
શોટ નોઇઝ
● મૂળ: ફોટોન અથવા ઇલેક્ટ્રોનનું આંકડાકીય આગમન.
● સિગ્નલના વર્ગમૂળ સાથેના ભીંગડા.
● ફોટોન-મર્યાદિત ઇમેજિંગમાં પ્રબળ (ખગોળશાસ્ત્ર, ફ્લોરોસેન્સ માઇક્રોસ્કોપી).
થર્મલ અવાજ
● તેને જોહ્ન્સન-નાયક્વિસ્ટ અવાજ પણ કહેવામાં આવે છે, જે રેઝિસ્ટરમાં ઇલેક્ટ્રોન ગતિ દ્વારા ઉત્પન્ન થાય છે.
● તાપમાન અને બેન્ડવિડ્થ સાથે વધે છે.
● ઇલેક્ટ્રોનિક્સ અને વાયરલેસ સંચારમાં મહત્વપૂર્ણ.
ઘેરો પ્રવાહ અવાજ
● સેન્સરમાં ઘેરા પ્રવાહમાં રેન્ડમ ફેરફાર.
● લાંબા સંપર્કમાં અથવા ગરમ ડિટેક્ટરમાં વધુ નોંધપાત્ર.
● સેન્સર ઠંડુ કરીને ઘટાડો.
વાંચન અવાજ
● એમ્પ્લીફાયર અને એનાલોગ-થી-ડિજિટલ રૂપાંતરણમાંથી અવાજ.
● પ્રતિ રીડઆઉટ સ્થિર, ઓછા-સિગ્નલ શાસનમાં ખૂબ જ મહત્વપૂર્ણ.
ક્વોન્ટાઇઝેશન ઘોંઘાટ
● ડિજિટાઇઝેશન (ડિસ્ક્રીટ લેવલ સુધી રાઉન્ડિંગ) દ્વારા રજૂ કરાયેલ.
● ઓછી-બીટ-ડેપ્થ સિસ્ટમ્સ (દા.ત., 8-બીટ ઑડિઓ) માં મહત્વપૂર્ણ.
પર્યાવરણીય/સિસ્ટમ ઘોંઘાટ
● EMI, ક્રોસસ્ટોક, પાવર સપ્લાય રિપલ.
● જો શિલ્ડિંગ/ગ્રાઉન્ડિંગ નબળું હોય તો પ્રભુત્વ મેળવી શકે છે.
આમાંથી કયું પ્રબળ છે તે સમજવાથી યોગ્ય સૂત્ર અને શમન પદ્ધતિ પસંદ કરવામાં મદદ મળે છે.
SNR ની ગણતરીમાં સામાન્ય ભૂલો
ઇમેજિંગમાં સિગ્નલ-ટુ-નોઇઝ રેશિયોનો અંદાજ કાઢવા માટે ઘણી 'શોર્ટકટ' પદ્ધતિઓનો સામનો કરવો સરળ છે. આ પદ્ધતિઓ કાં તો વિરુદ્ધ સમીકરણો કરતાં ઓછી જટિલ હોય છે, રીડ નોઇઝ જેવા કેમેરા પરિમાણોના જ્ઞાનની જરૂર પડવાને બદલે છબીમાંથી જ સરળ વ્યુત્પત્તિ માટે પરવાનગી આપે છે, અથવા બંને. કમનસીબે, સંભવ છે કે આમાંની દરેક પદ્ધતિ ખોટી છે, અને તે વિકૃત અને બિનઉપયોગી પરિણામો તરફ દોરી જશે. એવી ભારપૂર્વક સલાહ આપવામાં આવે છે કે બધા કિસ્સાઓમાં વિરુદ્ધ સમીકરણો (અથવા અદ્યતન સંસ્કરણ) નો ઉપયોગ કરવો જોઈએ.
કેટલાક સૌથી સામાન્ય ખોટા શોર્ટકટ્સમાં શામેલ છે:
૧, ગ્રે લેવલમાં સિગ્નલ ઇન્ટેન્સિટી અને બેકગ્રાઉન્ડ ઇન્ટેન્સિટીની સરખામણી કરવી. આ અભિગમ કેમેરાની સંવેદનશીલતા, સિગ્નલ સ્ટ્રેન્થ અથવા સિગ્નલ ટુ નોઇઝ રેશિયોને પીક ઇન્ટેન્સિટીની સરખામણી બેકગ્રાઉન્ડ ઇન્ટેન્સિટી સાથે કરીને નક્કી કરવાનો પ્રયાસ કરે છે. આ અભિગમ ખૂબ જ ખામીયુક્ત છે કારણ કે કેમેરા ઓફસેટનો પ્રભાવ મનસ્વી રીતે બેકગ્રાઉન્ડ ઇન્ટેન્સિટી સેટ કરી શકે છે, ગેઇન મનસ્વી રીતે સિગ્નલ ઇન્ટેન્સિટી સેટ કરી શકે છે, અને સિગ્નલ કે બેકગ્રાઉન્ડમાં અવાજના કોઈ યોગદાનને ધ્યાનમાં લેવામાં આવતું નથી.
2, પૃષ્ઠભૂમિ પિક્સેલ્સના ક્ષેત્રફળના પ્રમાણભૂત વિચલન દ્વારા સિગ્નલ શિખરોને વિભાજીત કરવા. અથવા, રેખા પ્રોફાઇલ દ્વારા જાહેર કરાયેલ પૃષ્ઠભૂમિમાં દ્રશ્ય અવાજ સાથે ટોચ મૂલ્યોની તુલના કરવી. ધારી રહ્યા છીએ કે વિભાજન પહેલાંના મૂલ્યોમાંથી ઓફસેટ યોગ્ય રીતે બાદ કરવામાં આવ્યો છે, આ અભિગમમાં સૌથી મહત્વપૂર્ણ ભય પૃષ્ઠભૂમિ પ્રકાશની હાજરી છે. કોઈપણ પૃષ્ઠભૂમિ પ્રકાશ સામાન્ય રીતે પૃષ્ઠભૂમિ પિક્સેલ્સમાં અવાજ પર પ્રભુત્વ ધરાવે છે. વધુમાં, રસના સિગ્નલમાં અવાજ, જેમ કે શોટ અવાજ, ખરેખર ધ્યાનમાં લેવામાં આવતો નથી.
૩, રસના પિક્સેલ્સમાં સરેરાશ સિગ્નલ વિરુદ્ધ પિક્સેલ મૂલ્યોના પ્રમાણભૂત વિચલન: પડોશી પિક્સેલ અથવા ક્રમિક ફ્રેમ્સમાં પીક સિગ્નલ કેટલો બદલાય છે તેની તુલના કરવી અથવા તેનું નિરીક્ષણ કરવું એ અન્ય શોર્ટકટ પદ્ધતિઓ કરતાં સાચા હોવાની નજીક છે, પરંતુ મૂલ્યોને વિકૃત કરતા અન્ય પ્રભાવોને ટાળવાની શક્યતા નથી, જેમ કે સિગ્નલમાં ફેરફાર જે અવાજથી પ્રાપ્ત થતો નથી. સરખામણીમાં ઓછી પિક્સેલ ગણતરીને કારણે આ પદ્ધતિ પણ અચોક્કસ હોઈ શકે છે. ઓફસેટ મૂલ્યની બાદબાકી પણ ભૂલવી જોઈએ નહીં.
4, ફોટોઈલેક્ટ્રોનના તીવ્રતા એકમોમાં રૂપાંતરિત કર્યા વિના અથવા ઓફસેટ દૂર કર્યા વિના SNR ની ગણતરી કરવી: ફોટોન શોટ અવાજ સામાન્ય રીતે સૌથી મોટો અવાજ સ્ત્રોત હોવાથી અને માપન માટે કેમેરાના ઓફસેટ અને ગેઇનના જ્ઞાન પર આધાર રાખે છે, તેથી SNR ગણતરીઓ માટે ફોટોઈલેક્ટ્રોન પર પાછા ગણતરી ટાળવી શક્ય નથી.
5, આંખ દ્વારા SNR નું મૂલ્યાંકન કરવું: જ્યારે કેટલીક પરિસ્થિતિઓમાં આંખ દ્વારા SNR નું મૂલ્યાંકન અથવા તુલના કરવી ઉપયોગી થઈ શકે છે, ત્યારે અણધારી મુશ્કેલીઓ પણ છે. ઉચ્ચ મૂલ્યના પિક્સેલ્સમાં SNR નું મૂલ્યાંકન કરવું ઓછા મૂલ્ય અથવા પૃષ્ઠભૂમિ પિક્સેલ કરતાં વધુ મુશ્કેલ હોઈ શકે છે. વધુ સૂક્ષ્મ અસરો પણ ભૂમિકા ભજવી શકે છે: ઉદાહરણ તરીકે, વિવિધ કમ્પ્યુટર મોનિટર ખૂબ જ અલગ કોન્ટ્રાસ્ટ સાથે છબીઓ રેન્ડર કરી શકે છે. વધુમાં, સોફ્ટવેરમાં વિવિધ ઝૂમ સ્તરો પર છબીઓ પ્રદર્શિત કરવાથી અવાજના દ્રશ્ય દેખાવ પર નોંધપાત્ર અસર પડી શકે છે. જો વિવિધ ઑબ્જેક્ટ સ્પેસ પિક્સેલ કદવાળા કેમેરાની તુલના કરવાનો પ્રયાસ કરવામાં આવે તો આ ખાસ કરીને સમસ્યારૂપ છે. છેલ્લે, પૃષ્ઠભૂમિ પ્રકાશની હાજરી SNR ને દૃષ્ટિની રીતે નક્કી કરવાના કોઈપણ પ્રયાસને રદ કરી શકે છે.
SNR ના ઉપયોગો
SNR એ એક સાર્વત્રિક મેટ્રિક છે જેમાં વ્યાપક એપ્લિકેશનો છે:
● ઑડિઓ અને સંગીત રેકોર્ડિંગ: રેકોર્ડિંગની સ્પષ્ટતા, ગતિશીલ શ્રેણી અને વફાદારી નક્કી કરે છે.
● વાયરલેસ કોમ્યુનિકેશન: SNR સીધા બીટ એરર રેટ (BER) અને ડેટા થ્રુપુટ સાથે સંબંધિત છે.
● વૈજ્ઞાનિક છબી: ખગોળશાસ્ત્રમાં, પૃષ્ઠભૂમિ આકાશના તેજ સામે ઝાંખા તારાઓ શોધવા માટે ઉચ્ચ SNR ની જરૂર પડે છે.
● તબીબી સાધનો: ECG, MRI અને CT સ્કેન શારીરિક અવાજથી સંકેતોને અલગ પાડવા માટે ઉચ્ચ SNR પર આધાર રાખે છે.
● કેમેરા અને ફોટોગ્રાફી: ગ્રાહક કેમેરા અને વૈજ્ઞાનિક CMOS સેન્સર બંને ઓછા પ્રકાશમાં પ્રદર્શનને માપવા માટે SNR નો ઉપયોગ કરે છે.
SNR માં સુધારો
SNR એ એક મહત્વપૂર્ણ માપદંડ હોવાથી, તેને સુધારવા માટે નોંધપાત્ર પ્રયાસો કરવા પડે છે. વ્યૂહરચનાઓમાં શામેલ છે:
હાર્ડવેર અભિગમો
● ઓછા ડાર્ક કરંટવાળા વધુ સારા સેન્સરનો ઉપયોગ કરો.
● EMI ઘટાડવા માટે શિલ્ડિંગ અને ગ્રાઉન્ડિંગ લાગુ કરો.
● થર્મલ અવાજને દબાવવા માટે કૂલ ડિટેક્ટર.
સોફ્ટવેર અભિગમો
● અનિચ્છનીય ફ્રીક્વન્સીઝ દૂર કરવા માટે ડિજિટલ ફિલ્ટર્સ લાગુ કરો.
● બહુવિધ ફ્રેમ્સમાં સરેરાશનો ઉપયોગ કરો.
● ઇમેજિંગ અથવા ઑડિઓ પ્રોસેસિંગમાં અવાજ ઘટાડવાના અલ્ગોરિધમ્સનો ઉપયોગ કરો.
પિક્સેલ બિનિંગ અને SNR પર તેની અસર
સિગ્નલ-ટુ-નોઈઝ રેશિયો પર બિનિંગની અસર કેમેરા ટેકનોલોજી અને સેન્સર વર્તણૂક પર આધાર રાખે છે, કારણ કે બિન કરેલા અને અનબિન કરેલા કેમેરાના અવાજ પ્રદર્શનમાં નોંધપાત્ર ફેરફાર થઈ શકે છે.
CCD કેમેરા 'ચિપ પર' અડીને આવેલા પિક્સેલના ચાર્જનો સરવાળો કરી શકે છે. રીડઆઉટ અવાજ ફક્ત એક જ વાર થાય છે, જોકે દરેક પિક્સેલમાંથી આવતા ડાર્ક કરંટ સિગ્નલનો પણ સરવાળો કરવામાં આવશે.
મોટાભાગના CMOS કેમેરા ઓફ-ચિપ બિનિંગ કરે છે, જેનો અર્થ છે કે મૂલ્યો પહેલા માપવામાં આવે છે (અને વાંચન અવાજ રજૂ કરવામાં આવે છે), અને પછી ડિજિટલ રીતે સારાંશ આપવામાં આવે છે. આવા સારાંશ માટે વાંચન અવાજ સારાંશ કરાયેલા પિક્સેલ્સની સંખ્યાના વર્ગમૂળ દ્વારા ગુણાકાર દ્વારા વધે છે, એટલે કે 2x2 બિનિંગ માટે 2 ના અવયવ દ્વારા.
સેન્સર્સનું અવાજનું વર્તન જટિલ હોઈ શકે છે, તેથી જથ્થાત્મક એપ્લિકેશનો માટે કેમેરાના ઓફસેટ, ગેઇન અને રીડ અવાજને બિન્ડ મોડમાં માપવાની સલાહ આપવામાં આવે છે, અને સિગ્નલ-ટુ-નોઈઝ રેશિયો સમીકરણ માટે આ મૂલ્યોનો ઉપયોગ કરો.
નિષ્કર્ષ
સિગ્નલ-ટુ-નોઈઝ રેશિયો (SNR) એ વિજ્ઞાન, એન્જિનિયરિંગ અને ટેકનોલોજીમાં સૌથી મહત્વપૂર્ણ માપદંડોમાંનું એક છે. ફોન કૉલ્સમાં સ્પષ્ટતાને વ્યાખ્યાયિત કરવાથી લઈને દૂરના તારાવિશ્વોની શોધને સક્ષમ કરવા સુધી, SNR માપન અને સંદેશાવ્યવહાર પ્રણાલીઓની ગુણવત્તાને ટેકો આપે છે. SNR માં નિપુણતા મેળવવી એ ફક્ત સૂત્રો યાદ રાખવા વિશે નથી - તે ધારણાઓ, મર્યાદાઓ અને વાસ્તવિક દુનિયાના વેપાર-વિવાદોને સમજવા વિશે છે. આ દ્રષ્ટિકોણથી, એન્જિનિયરો અને સંશોધકો વધુ વિશ્વસનીય માપન કરી શકે છે અને એવી સિસ્ટમો ડિઝાઇન કરી શકે છે જે ઘોંઘાટીયા પરિસ્થિતિઓમાં પણ અર્થપૂર્ણ આંતરદૃષ્ટિ મેળવે છે.
વધુ જાણવા માંગો છો? સંબંધિત લેખો પર એક નજર નાખો:
ટક્સેન ફોટોનિક્સ કંપની લિમિટેડ. સર્વાધિકાર સુરક્ષિત. ટાંકતી વખતે, કૃપા કરીને સ્રોત સ્વીકારો:www.tucsen.com








