
 2022/06/21
2022/06/21I moderne vitenskapelig avbildning og industriell inspeksjon er tid ikke lenger en sekundær egenskap – det er en grunnleggende dimensjon av hvordan eksperimenter kjøres, hvordan enheter koordineres og hvordan data tolkes.
Et tidsstempel bestemmer når hver ramme blir tatt, og former alt fra reproduserbarhet av eksperimenter til synkronisering mellom flere enheter og gyldigheten av nedstrømsanalyser.
Hvorvidt et kamera kan levere høypresisjons-, lav-jitter- og deterministiske tidsstempler er nå en nøkkelindikator på dets profesjonelle evner.
01 | Hva er et tidsstempel?
Et tidsstempel er en digital markør som registrererfaktisk opptakstidav hvert bilderamme. Avhengig av systemet kan presisjonen variere fra sekunder ned til millisekunder, mikrosekunder eller til og med nanosekunder.
Vanlige tidsstempelformater
| Type | Eksempelformat | Beskrivelse |
| UNIX-tidsstempel (numerisk) | 1733558400 (sekunder) / 1733558400123 (ms) | Tid som har gått siden 1970-01-01 UTC |
| ISO 8601 (lesbart format) | 2025-12-07T12:30:45Z / +08:00 | Standard dato, klokkeslett og tidssone |
| Innebygd tidsstempeloverlegg | 2025/12/07 12:30:45 | Menneskelig synlig tidsstempel på selve bildet |
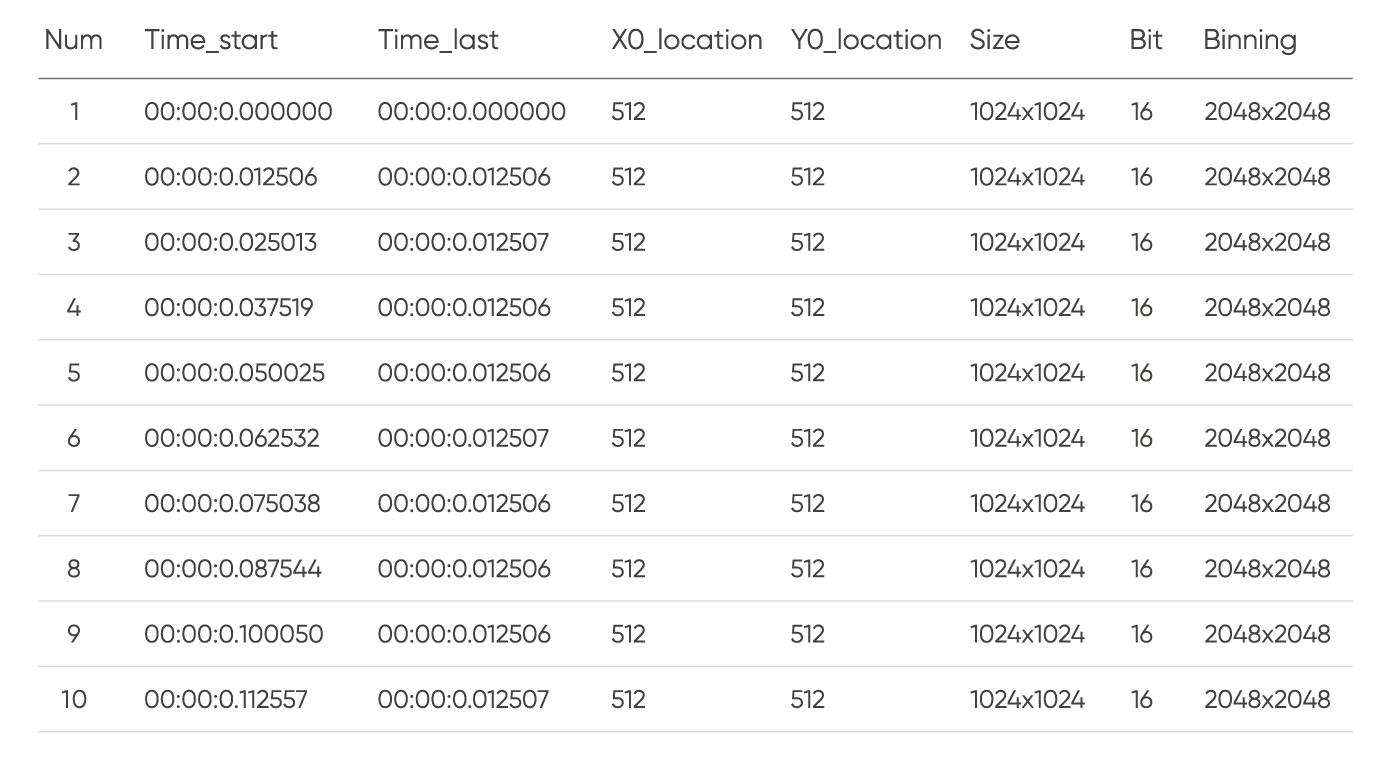
Eksempelfiler for tidsstempel fra Tucsen-kamera
02 | Programvaretidsstempler kontra maskinvaretidsstempler
Programvaretidsstempler genereres etter at PC-en mottar bildedataene, mens maskinvaretidsstempler genereres inne i kameraet ved den nøyaktige eksponeringshendelsen.
Forskjellen mellom de to kan påvirke tidsnøyaktigheten, synkroniseringens pålitelighet og integriteten til dynamiske målinger betydelig.
1. Programvaretidsstempler
Programvaretidsstempler produseres av PC-driveren eller -applikasjonen når bildet allerede har ankommet verten. De gjenspeiler dataankomsttid, ikke eksponeringstid.
Fordeler – universell og enkel å implementere
• Uavhengig av kameraets maskinvaredesign
• Fungerer med alle større grensesnitt (USB, GigE, CameraLink osv.)
• Enkel å generere fra systemtid i programvare
• Godt egnet for rask utvikling, feilsøking og logging
• Lav integrasjonskostnad og høy kompatibilitet
Begrensninger – Ikke egnet for presisjonstidtaking
Programvaretidsstempler påvirkes av hele dataoverføringskjeden:
Kamera → Grensesnitt (USB/GigE/CXP) → Vertsdriver → OS-planlegging → Programvare
Enhver forsinkelse, bufring eller CPU-planleggingshendelse kan introdusere ikke-deterministisk feil på ms-nivå.
Etter hvert som bildefrekvensen øker utover ~50 fps, vokser disse variasjonene raskt og kan undergrave påliteligheten til tidsstempelet alvorlig.
Typiske brukstilfeller (<30 fps lavhastighetsavbildning)
| Søknadsscenario | Rollen til programvaretidsstempel |
Anbefalte kameraer
|
| Biologisk mikroskopi (rutinemessig fluorescens-/vevsavbildning) | Datahåndtering, rammesortering, justering i analyseprogramvare |
|
| Industriell mikroskopi (materialinspeksjon / metallografi) | Støtter batchsporing, bildesporbarhet og grunnleggende QC-logging |
2. Tidsstempler for maskinvare
Maskinvaretidsstempler genereres i kameraets FPGA eller tidskrets i det nøyaktige start- eller sluttøyeblikket for eksponeringen. De representerer den sanne fysiske opptakstiden, upåvirket av overføring eller OS-forsinkelse.
Fordeler – Høy presisjon og deterministisk timing
Maskinvaretidsstempler tilbyr:
• Presisjon fra mikrosekund (µs) til submikrosekund
• Null avhengighet av dataoverføringstidspunktet
• Stabile, repeterbare, jitterfrie utganger
• 1:1-korrespondanse med faktisk sensoreksponeringstid
Dette gjør dem essensielle for høyhastighetsavbildning, synkroniserte eksperimenter og tidskritiske målinger.
Begrensninger – Avhengig av maskinvare og design
Maskinvaretidsstempler krever:
• Presisjonstidslogikk i FPGA/ASIC
• Høystabilitetsoscillatorer (TCXO/OCXO)
• Nøyaktig eksponeringstid og forsinkelseskompensasjon
• Synkronisert datastrømkoding
• Konsistens med SDK-/driverparseringsformater
Fordi implementeringer varierer mellom produsenter, kan integrering på tvers av systemer kreve ytterligere kalibrering eller dokumentasjonsgjennomgang.
Utviklingskostnader og kompleksitet er høyere enn tidsstempler for programvare.
Typiske høyhastighetsapplikasjoner (>50 fps)
| Bruksområder | Hvordan maskinvaretidsstempler hjelper | Anbefalte kameraer |
| Biovitenskap(høyhastighets kalsium- eller spenningsavbildning) | Registrerer faktiske eksponeringstider; synkroniserer lasere via Trigger Out |
|
| Fysiske vitenskaper(bevegelsesopptak i høy hastighet) | Gir absolutt timing på µs-nivå for nøyaktig rekonstruksjon av baner | |
| Halvlederinspeksjon (inspeksjon av wafer og panel) | Tidsstempelbasert kamerasynkronisering; muliggjør koderbasert tid-posisjonskartlegging | |
| Instrumentintegrasjon(kamera + laser + motorisert scene) | Fungerer som en systemomfattende absolutt tidsreferanse; muliggjør koordinering på µs-nivå |








