 25. 9. 2011
25. 9. 2011V akomkoľvek meracom systéme – od bezdrôtovej komunikácie až po digitálnu fotografiu – je pomer signálu k šumu (SNR) základným kritériom kvality. Či už analyzujete snímky z ďalekohľadu, vylepšujete nahrávky z mikrofónu alebo riešite problémy s bezdrôtovým spojením, SNR vám povie, koľko užitočných informácií vyniká na pozadí neželaného šumu.
Správny výpočet SNR však nie je vždy jednoduchý. V závislosti od systému môže byť potrebné zvážiť ďalšie faktory, ako je tmavý prúd, šum pri čítaní alebo zlučovanie pixelov. Táto príručka vás prevedie teóriou, základnými vzorcami, bežnými chybami, aplikáciami a praktickými spôsobmi, ako zlepšiť SNR, a zabezpečí, že ho budete môcť presne aplikovať v širokej škále kontextov.
Čo je pomer signálu k šumu (SNR)?
V jadre pomer signálu k šumu meria vzťah medzi silou požadovaného signálu a šumom pozadia, ktorý ho zakrýva.
● Signál = zmysluplná informácia (napr. hlas v hovore, hviezda na snímke z ďalekohľadu).
● Šum = náhodné, nechcené fluktuácie, ktoré skresľujú alebo zakrývajú signál (napr. statický šum, šum senzora, elektrické rušenie).
Matematicky je SNR definovaný ako:

Keďže tieto pomery sa môžu meniť v priebehu mnohých rádov, SNR sa zvyčajne vyjadruje v decibeloch (dB):
● Vysoký pomer signálu k šumu (napr. 40 dB): signál dominuje, čo vedie k jasným a spoľahlivým informáciám.
● Nízky pomer signálu k šumu (napr. 5 dB): šum prehlušuje signál, čo sťažuje interpretáciu.
Ako vypočítať pomer signálu k šumu (SNR)
Výpočet pomeru signálu k šumu je možné vykonať s rôznou úrovňou presnosti v závislosti od zahrnutých zdrojov šumu. V tejto časti budú predstavené dve formy: jedna, ktorá zohľadňuje tmavý prúd, a druhá, ktorá predpokladá, že ho možno zanedbať.
Poznámka: Sčítanie nezávislých hodnôt šumu vyžaduje ich kvadratúrne sčítanie. Každý zdroj šumu sa umocní, sčíta a z celkového súčtu sa vypočíta druhá odmocnina.
Pomer signálu k šumu s tmavým prúdom
Nasledujúca rovnica sa používa v situáciách, keď je šum tmavého prúdu dostatočne veľký na to, aby vyžadoval zahrnutie:

Tu je definícia pojmov:
Signál (e-): Toto je signál fotoelektrónov, ktoré nás zaujímajú, po odčítaní signálu tmavého prúdu.

Celkový signál (e-) bude počet fotoelektrónov v danom pixeli – nie striktne hodnota pixelu v jednotkách úrovní sivej. Druhým príkladom signálu (e-) v spodnej časti rovnice je šum fotónu.
Tmavý prúd (DC):Hodnota tmavého prúdu pre daný pixel.
t: Expozičný čas v sekundách
σr:Čítanie šumu v režime fotoaparátu.
Pomer signálu k šumu pre zanedbateľný tmavý prúd
V prípade krátkych (Pri expozičných časoch < 1 sekunda a chladených, vysokovýkonných kamerách bude šum tmavého prúdu vo všeobecnosti výrazne nižší ako šum pri čítaní a bezpečne sa bude zanedbávať.
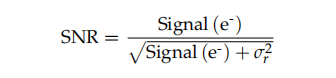
Kde sú výrazy opäť definované vyššie, s výnimkou, že signál tmavého prúdu nie je potrebné vypočítavať a odpočítavať od signálu, pretože by sa mal rovnať nule.
Obmedzenia týchto vzorcov a chýbajúce výrazy
Vzorce na opačnej strane poskytnú správne odpovede iba pre CCD aCMOS kameryEMCCD a zosilnené zariadenia zavádzajú ďalšie zdroje šumu, takže tieto rovnice nemožno použiť. Pre úplnejšiu rovnicu pomeru signálu k šumu, ktorá zohľadňuje tieto a ďalšie príspevky.
Ďalším šumovým pojmom, ktorý sa bežne používa (alebo používal) v rovniciach SNR, je nerovnomernosť fotoodozvy (PRNU), niekedy označovaná aj ako „šum s pevným vzorom“ (FPN). Predstavuje nerovnomernosť zosilnenia a odozvy signálu v celom senzore, ktorá sa môže stať dominantnou pri vysokých signáloch, ak sú dostatočne veľké, čím sa znižuje SNR.
Zatiaľ čo skoré kamery mali dostatočne významný PRNU na to, aby si vyžadovali jeho zahrnutie, väčšina modernýchvedecké kamerymajú dostatočne nízky PRNU, aby bol jeho príspevok výrazne nižší ako príspevok fotónového šumu, najmä po aplikácii integrovaných korekcií. Preto sa v súčasnosti pri výpočtoch SNR zvyčajne zanedbáva. PRNU je však stále dôležitý pre niektoré fotoaparáty a aplikácie a pre úplnosť je zahrnutý v pokročilejšej rovnici SNR. To znamená, že uvedené rovnice sú užitočné pre väčšinu systémov CCD/CMOS, ale nemali by sa považovať za univerzálne použiteľné.
Typy šumu vo výpočtoch SNR
Výpočet SNR nie je len o porovnaní signálu s jednou hodnotou šumu. V praxi prispieva viacero nezávislých zdrojov šumu a ich pochopenie je nevyhnutné.
Hluk z výstrelu
● Pôvod: štatistický príchod fotónov alebo elektrónov.
● Škáluje sa druhou odmocninou signálu.
● Dominantné v zobrazovaní s obmedzeným počtom fotónov (astronómia, fluorescenčná mikroskopia).
Tepelný šum
● Nazýva sa aj Johnsonov-Nyquistov šum a vzniká v dôsledku pohybu elektrónov v rezistoroch.
● Zvyšuje sa s teplotou a šírkou pásma.
● Dôležité v elektronike a bezdrôtovej komunikácii.
Šum temného prúdu
● Náhodné zmeny tmavého prúdu v senzoroch.
● Výraznejšie pri dlhých expozíciách alebo teplých detektoroch.
● Znížené chladením snímača.
Čítanie šumu
● Šum zo zosilňovačov a analógovo-digitálneho prevodu.
● Fixné na odčítanie, takže je kritické v režimoch s nízkym signálom.
Kvantizačný šum
● Zavedené digitalizáciou (zaokrúhľovanie na diskrétne úrovne).
● Dôležité v systémoch s nízkou bitovou hĺbkou (napr. 8-bitový zvuk).
Hluk prostredia/systému
● EMI, presluchy, zvlnenie napájania.
● Môže dominovať, ak je tienenie/uzemnenie slabé.
Pochopenie toho, ktorý z nich je dominantný, pomáha pri výbere správneho zloženia a metódy zmierňovania.
Bežné chyby pri výpočte SNR
Je ľahké nájsť mnoho „skrátených“ metód na odhad pomeru signálu k šumu pri zobrazovaní. Tieto metódy bývajú buď menej zložité ako rovnice na opačnej strane, umožňujú jednoduchšie odvodenie zo samotného obrazu a nevyžadujú znalosť parametrov kamery, ako je napríklad šum pri čítaní, alebo oboje. Bohužiaľ, je pravdepodobné, že každá z týchto metód je nesprávna a povedie k skresleným a neužitočným výsledkom. Dôrazne sa odporúča, aby sa vo všetkých prípadoch používala rovnica na opačnej strane (alebo pokročilá verzia).
Medzi najbežnejšie falošné skratky patria:
1. Porovnanie intenzity signálu s intenzitou pozadia v odtieňoch sivej. Tento prístup sa pokúša posúdiť citlivosť kamery, silu signálu alebo pomer signálu k šumu porovnaním špičkovej intenzity s intenzitou pozadia. Tento prístup je hlboko chybný, pretože vplyv posunu kamery môže ľubovoľne nastaviť intenzitu pozadia, zosilnenie môže ľubovoľne nastaviť intenzitu signálu a nezohľadňuje sa žiadny príspevok šumu, či už v signále alebo v pozadí.
2. Vydelenie vrcholov signálu štandardnou odchýlkou oblasti pixelov pozadia. Alebo porovnanie hodnôt vrcholov s vizuálnym šumom v pozadí odhaleným profilom čiary. Za predpokladu, že posun je správne odčítaný od hodnôt pred delením, najvýznamnejším nebezpečenstvom pri tomto prístupe je prítomnosť svetla pozadia. Akékoľvek svetlo pozadia bude typicky dominovať šumu v pixeloch pozadia. Okrem toho sa šum v sledovanom signále, ako napríklad šum výstrelov, v skutočnosti vôbec nezohľadňuje.
3. Priemerný signál v sledovaných pixeloch vs. štandardná odchýlka hodnôt pixelov: Porovnanie alebo pozorovanie toho, o koľko sa mení špičkový signál v susedných pixeloch alebo po sebe nasledujúcich snímkach, je bližšie k správnosti ako iné skrátené metódy, ale je nepravdepodobné, že sa tým zabráni iným vplyvom skresľujúcim hodnoty, ako je napríklad zmena signálu, ktorá nepochádza zo šumu. Táto metóda môže byť tiež nepresná kvôli nízkemu počtu pixelov v porovnaní. Nesmie sa zabudnúť ani na odčítanie hodnoty posunu.
4. Výpočet SNR bez prevodu na jednotky intenzity fotoelektrónov alebo bez odstránenia ofsetu: Keďže šum fotónového výboja je zvyčajne najväčším zdrojom šumu a pri meraní sa spolieha na znalosť ofsetu a zisku kamery, nie je možné vyhnúť sa výpočtu SNR späť na fotoelektróny.
5. Posudzovanie SNR okom: Zatiaľ čo za určitých okolností môže byť posudzovanie alebo porovnávanie SNR okom užitočné, existujú aj neočakávané úskalia. Posudzovanie SNR v pixeloch s vysokou hodnotou môže byť ťažšie ako v pixeloch s nízkou hodnotou alebo v pixeloch pozadia. Úlohu môžu zohrávať aj jemnejšie efekty: Napríklad rôzne počítačové monitory môžu vykresľovať obrázky s veľmi odlišným kontrastom. Okrem toho, zobrazovanie obrázkov s rôznymi úrovňami priblíženia v softvéri môže výrazne ovplyvniť vizuálny vzhľad šumu. To je obzvlášť problematické pri porovnávaní kamier s rôznymi veľkosťami pixelov v objektovom priestore. Nakoniec, prítomnosť svetla pozadia môže znemožniť akýkoľvek pokus o vizuálne posúdenie SNR.
Aplikácie signálu od šumu (SNR)
SNR je univerzálna metrika so širokým spektrom aplikácií:
● Nahrávanie zvuku a hudby: Určuje čistotu, dynamický rozsah a vernosť nahrávok.
● Bezdrôtová komunikácia: Pomer signálu k šumu (SNR) priamo súvisí s mierou chybovosti bitov (BER) a priepustnosťou dát.
● Vedecké zobrazovanie: V astronómii si detekcia slabých hviezd na pozadí žiary oblohy vyžaduje vysoký pomer signálu k šumu (SNR).
● Zdravotnícke vybavenie: EKG, MRI a CT vyšetrenia sa spoliehajú na vysoký pomer signálu k šumu (SNR) na rozlíšenie signálov od fyziologického šumu.
● Fotoaparáty a fotografia: Spotrebiteľské fotoaparáty aj vedecké CMOS snímače používajú pomer signálu k šumu (SNR) na porovnávanie výkonu pri slabom osvetlení.
Zlepšenie signálu od šumu (SNR)
Keďže pomer signálu k šumu (SNR) je takým kritickým ukazovateľom, vynakladá sa značné úsilie na jeho zlepšenie. Stratégie zahŕňajú:
Hardvérové prístupy
● Používajte lepšie senzory s nižším tmavým prúdom.
● Na zníženie elektromagnetického rušenia použite tienenie a uzemnenie.
● Chladné detektory na potlačenie tepelného šumu.
Softvérové prístupy
● Na odstránenie nežiaducich frekvencií použite digitálne filtre.
● Použite priemerovanie naprieč viacerými snímkami.
● Využívajte algoritmy na redukciu šumu pri spracovaní obrazu alebo zvuku.
Združovanie pixelov a jeho vplyv na signál od šumu (SNR)
Vplyv binningu na pomer signálu k šumu závisí od technológie kamery a správania snímača, pretože šumový výkon binningových a nebinovaných kamier sa môže výrazne líšiť.
CCD kamery dokážu sčítať náboj susedných pixelov „na čipe“. Šum pri čítaní vzniká iba raz, hoci sa sčíta aj signál tmavého prúdu z každého pixelu.
Väčšina CMOS kamier vykonáva binning mimo čipu, čo znamená, že hodnoty sa najprv merajú (zavádza sa šum pri čítaní) a potom sa digitálne sčítajú. Šum pri čítaní sa pri takýchto sčítaniach zvyšuje vynásobením druhou odmocninou z počtu sčítaných pixelov, t. j. dvojnásobne pri binningu 2x2.
Keďže šumové správanie senzorov môže byť komplikované, pre kvantitatívne aplikácie je vhodné merať ofset, zisk a šum čítania kamery v režime binned a tieto hodnoty použiť pre rovnicu pomeru signálu k šumu.
Záver
Pomer signálu k šumu (SNR) je jednou z najdôležitejších metrík vo vede, technike a technológii. Od definovania jasnosti telefonických hovorov až po umožnenie detekcie vzdialených galaxií, SNR podporuje kvalitu meracích a komunikačných systémov. Zvládnutie SNR nie je len o zapamätaní si vzorcov – ide o pochopenie predpokladov, obmedzení a kompromisov v reálnom svete. Z tohto hľadiska môžu inžinieri a výskumníci vykonávať spoľahlivejšie merania a navrhovať systémy, ktoré získavajú zmysluplné poznatky aj v hlučných podmienkach.
Chcete sa dozvedieť viac? Pozrite si súvisiace články:
Tucsen Photonics Co., Ltd. Všetky práva vyhradené. Pri citovaní uveďte zdroj:www.tucsen.com








