 25/09/11
25/09/11వైర్లెస్ కమ్యూనికేషన్ నుండి డిజిటల్ ఫోటోగ్రఫీ వరకు ఏ కొలత వ్యవస్థలోనైనా - సిగ్నల్-టు-నాయిస్ నిష్పత్తి (SNR) నాణ్యతకు ప్రాథమిక ప్రమాణం. మీరు టెలిస్కోప్ చిత్రాలను విశ్లేషిస్తున్నా, మైక్రోఫోన్ రికార్డింగ్లను మెరుగుపరుస్తున్నా లేదా వైర్లెస్ లింక్ను ట్రబుల్షూట్ చేస్తున్నా, అవాంఛిత నేపథ్య శబ్దం నుండి ఎంత ఉపయోగకరమైన సమాచారం నిలుస్తుందో SNR మీకు చెబుతుంది.
కానీ SNR ను సరిగ్గా లెక్కించడం ఎల్లప్పుడూ సులభం కాదు. సిస్టమ్పై ఆధారపడి, డార్క్ కరెంట్, రీడ్ నాయిస్ లేదా పిక్సెల్ బిన్నింగ్ వంటి అదనపు అంశాలను పరిగణనలోకి తీసుకోవలసి ఉంటుంది. ఈ గైడ్ SNR ను మెరుగుపరచడానికి సిద్ధాంతం, ప్రధాన సూత్రాలు, సాధారణ తప్పులు, అనువర్తనాలు మరియు ఆచరణాత్మక మార్గాల ద్వారా మిమ్మల్ని నడిపిస్తుంది, మీరు దానిని విస్తృత శ్రేణి సందర్భాలలో ఖచ్చితంగా వర్తింపజేయగలరని నిర్ధారిస్తుంది.
సిగ్నల్-టు-నాయిస్ నిష్పత్తి (SNR) అంటే ఏమిటి?
దాని ప్రధాన భాగంలో, సిగ్నల్-టు-నాయిస్ నిష్పత్తి కావలసిన సిగ్నల్ యొక్క బలం మరియు దానిని అస్పష్టం చేసే నేపథ్య శబ్దం మధ్య సంబంధాన్ని కొలుస్తుంది.
● సిగ్నల్ = అర్థవంతమైన సమాచారం (ఉదా. కాల్లో స్వరం, టెలిస్కోప్ చిత్రంలో నక్షత్రం).
● శబ్దం = సిగ్నల్ను వక్రీకరించే లేదా దాచే యాదృచ్ఛిక, అవాంఛిత హెచ్చుతగ్గులు (ఉదా., స్టాటిక్, సెన్సార్ శబ్దం, విద్యుత్ జోక్యం).
గణితశాస్త్రపరంగా, SNR ని ఇలా నిర్వచించారు:

ఈ నిష్పత్తులు అనేక పరిమాణాలలో మారవచ్చు కాబట్టి, SNR సాధారణంగా డెసిబెల్స్ (dB)లో వ్యక్తీకరించబడుతుంది:
● అధిక SNR (ఉదా., 40 dB): సిగ్నల్ ఆధిపత్యం చెలాయిస్తుంది, ఫలితంగా స్పష్టమైన మరియు నమ్మదగిన సమాచారం లభిస్తుంది.
● తక్కువ SNR (ఉదా., 5 dB): శబ్దం సిగ్నల్ను ముంచెత్తుతుంది, దీని వలన వివరణ కష్టమవుతుంది.
SNR ను ఎలా లెక్కించాలి
సిగ్నల్-టు-నాయిస్ నిష్పత్తిని లెక్కించడం అనేది శబ్ద మూలాలను చేర్చిన దానిపై ఆధారపడి వివిధ స్థాయిల ఖచ్చితత్వంతో నిర్వహించబడుతుంది. ఈ విభాగంలో, రెండు రూపాలు ప్రవేశపెట్టబడతాయి: ఒకటి డార్క్ కరెంట్ను పరిగణనలోకి తీసుకునేది మరియు మరొకటి దానిని విస్మరించవచ్చని భావించేది.
గమనిక: స్వతంత్ర శబ్ద విలువలను జోడించడానికి వాటిని క్వాడ్రేచర్లో జోడించడం అవసరం. ప్రతి శబ్ద మూలాన్ని వర్గీకరిస్తారు, సంగ్రహిస్తారు మరియు మొత్తం యొక్క వర్గమూలాన్ని తీసుకుంటారు.
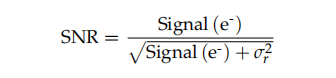
డార్క్ కరెంట్తో సిగ్నల్-టు-నాయిస్ నిష్పత్తి
డార్క్ కరెంట్ శబ్దం చేర్చాల్సినంత ఎక్కువగా ఉన్న సందర్భాల్లో ఉపయోగించాల్సిన సమీకరణం క్రిందిది:

పదాల నిర్వచనం ఇక్కడ ఉంది:
సిగ్నల్ (e-): ఇది ఫోటోఎలక్ట్రాన్లలో ఆసక్తిని సూచించే సంకేతం, డార్క్ కరెంట్ సిగ్నల్ తీసివేయబడుతుంది.

మొత్తం సిగ్నల్ (e-) అనేది ఆసక్తి ఉన్న పిక్సెల్లోని ఫోటోఎలక్ట్రాన్ కౌంట్ అవుతుంది - ఖచ్చితంగా బూడిద స్థాయిల యూనిట్లలోని పిక్సెల్ విలువ కాదు. సమీకరణం దిగువన ఉన్న సిగ్నల్ (e-) యొక్క రెండవ ఉదాహరణ ఫోటోన్షాట్ శబ్దం.
డార్క్ కరెంట్ (DC):ఆ పిక్సెల్ యొక్క డార్క్ కరెంట్ విలువ.
t: సెకన్లలో ఎక్స్పోజర్ సమయం
σr: (σr)కెమెరా మోడ్లో శబ్దాన్ని చదవండి.
అతితక్కువ డార్క్ కరెంట్ కోసం సిగ్నల్-టు-నాయిస్ నిష్పత్తి
చిన్న సందర్భాలలో (< 1 సెకను) ఎక్స్పోజర్ సమయాలు, ప్లస్ కూల్డ్, హై-పెర్ఫార్మెన్స్ కెమెరాలు, డార్క్ కరెంట్ శబ్దం సాధారణంగా రీడ్ శబ్దం కంటే చాలా తక్కువగా ఉంటుంది మరియు సురక్షితంగా విస్మరించబడుతుంది.
డార్క్ కరెంట్ సిగ్నల్ను లెక్కించాల్సిన అవసరం లేదు మరియు సిగ్నల్ నుండి తీసివేయవలసిన అవసరం లేదు కాబట్టి అది సున్నాకి సమానంగా ఉండాలి అనే మినహాయింపుతో, పదాలు మరోసారి పైన నిర్వచించబడ్డాయి.
ఈ సూత్రాల పరిమితులు మరియు తప్పిపోయిన పదాలు
ఎదురుగా ఉన్న సూత్రాలు CCD కి సరైన సమాధానాలను మాత్రమే అందిస్తాయి మరియుCMOS కెమెరాలు. EMCCD మరియు తీవ్రతరం చేసిన పరికరాలు అదనపు శబ్ద వనరులను పరిచయం చేస్తాయి, కాబట్టి ఈ సమీకరణాలను ఉపయోగించలేము. వీటిని మరియు ఇతర సహకారాలను వివరించే మరింత పూర్తి సిగ్నల్-టు-శబ్ద నిష్పత్తి సమీకరణం కోసం.
SNR సమీకరణాలలో సాధారణంగా చేర్చబడే (లేదా గతంలో ఉండే) మరొక శబ్ద పదం ఫోటో-రెస్పాన్స్ నాన్-యూనిఫారిటీ (PRNU), దీనిని కొన్నిసార్లు 'ఫిక్స్డ్ ప్యాటర్న్ నాయిస్' (FPN) అని కూడా పిలుస్తారు. ఇది సెన్సార్ అంతటా లాభం మరియు సిగ్నల్ ప్రతిస్పందన యొక్క అసమానతను సూచిస్తుంది, ఇది తగినంత పెద్దదిగా ఉంటే అధిక సిగ్నల్ల వద్ద ఆధిపత్యం చెలాయిస్తుంది, SNRను తగ్గిస్తుంది.
ప్రారంభ కెమెరాలు దాని చేర్చడానికి అవసరమైనంత గణనీయమైన PRNU కలిగి ఉండగా, చాలా ఆధునికమైనవిశాస్త్రీయ కెమెరాలుఫోటాన్ షాట్ శబ్దం కంటే చాలా తక్కువ PRNU కలిగి ఉండటం వలన, ముఖ్యంగా ఆన్-బోర్డ్ దిద్దుబాట్లు వర్తింపజేసిన తర్వాత, దాని సహకారాన్ని ఫోటాన్ షాట్ శబ్దం కంటే చాలా తక్కువగా చేస్తుంది. కాబట్టి, ఇప్పుడు ఇది సాధారణంగా SNR గణనలలో నిర్లక్ష్యం చేయబడుతుంది. అయినప్పటికీ, PRNU ఇప్పటికీ కొన్ని కెమెరాలు మరియు అప్లికేషన్లకు ముఖ్యమైనది మరియు పరిపూర్ణత కోసం మరింత అధునాతన SNR సమీకరణంలో చేర్చబడింది. దీని అర్థం అందించిన సమీకరణాలు చాలా CCD/CMOS వ్యవస్థలకు ఉపయోగకరంగా ఉంటాయి కానీ విశ్వవ్యాప్తంగా వర్తించేవిగా పరిగణించకూడదు.
SNR గణనలలో శబ్ద రకాలు
SNRను లెక్కించడం అంటే ఒక సిగ్నల్ను ఒకే శబ్ద విలువతో పోల్చడం మాత్రమే కాదు. ఆచరణలో, బహుళ స్వతంత్ర శబ్ద వనరులు దోహదం చేస్తాయి మరియు వాటిని అర్థం చేసుకోవడం చాలా అవసరం.
షాట్ శబ్దం
● మూలం: ఫోటాన్లు లేదా ఎలక్ట్రాన్ల గణాంక రాక.
● సిగ్నల్ యొక్క వర్గమూలంతో స్కేల్స్.
● ఫోటాన్-పరిమిత ఇమేజింగ్లో ఆధిపత్యం (ఖగోళ శాస్త్రం, ఫ్లోరోసెన్స్ మైక్రోస్కోపీ).
థర్మల్ శబ్దం
● దీనిని జాన్సన్-నైక్విస్ట్ శబ్దం అని కూడా పిలుస్తారు, ఇది రెసిస్టర్లలో ఎలక్ట్రాన్ కదలిక ద్వారా ఉత్పత్తి అవుతుంది.
● ఉష్ణోగ్రత మరియు బ్యాండ్విడ్త్తో పెరుగుతుంది.
● ఎలక్ట్రానిక్స్ మరియు వైర్లెస్ కమ్యూనికేషన్లో ముఖ్యమైనది.
డార్క్ కరెంట్ శబ్దం
● సెన్సార్లలోని డార్క్ కరెంట్లో యాదృచ్ఛిక వైవిధ్యం.
● ఎక్కువసేపు ఎక్స్పోజర్లు లేదా వెచ్చని డిటెక్టర్లలో మరింత ముఖ్యమైనది.
● సెన్సార్ను చల్లబరచడం ద్వారా తగ్గించబడింది.
శబ్దం చదవండి
● యాంప్లిఫైయర్ల నుండి శబ్దం మరియు అనలాగ్-టు-డిజిటల్ మార్పిడి.
● ప్రతి రీడౌట్కు స్థిరంగా ఉంటుంది, తక్కువ-సిగ్నల్ పాలనలలో ఇది చాలా కీలకం.
క్వాంటైజేషన్ నాయిస్
● డిజిటలైజేషన్ ద్వారా పరిచయం చేయబడింది (వివిక్త స్థాయిలకు చుట్టుముట్టడం).
● తక్కువ-బిట్-డెప్త్ సిస్టమ్లలో ముఖ్యమైనది (ఉదా., 8-బిట్ ఆడియో).
పర్యావరణ/వ్యవస్థ శబ్దం
● EMI, క్రాస్స్టాక్, విద్యుత్ సరఫరా అలలు.
● షీల్డింగ్/గ్రౌండింగ్ పేలవంగా ఉంటే ఆధిపత్యం చెలాయించగలదు.
వీటిలో ఏది ప్రబలంగా ఉందో అర్థం చేసుకోవడం సరైన సూత్రం మరియు ఉపశమన పద్ధతిని ఎంచుకోవడంలో సహాయపడుతుంది.
SNR లెక్కించడంలో సాధారణ తప్పులు
ఇమేజింగ్లో సిగ్నల్-టు-నాయిస్ నిష్పత్తిని అంచనా వేయడానికి అనేక 'షార్ట్కట్' పద్ధతులను సులభంగా చూడవచ్చు. ఇవి వ్యతిరేక సమీకరణాల కంటే తక్కువ సంక్లిష్టంగా ఉంటాయి, రీడ్ నాయిస్ వంటి కెమెరా పారామితుల జ్ఞానం అవసరం కాకుండా చిత్రం నుండే సులభంగా ఉత్పన్నం చేయడానికి అనుమతిస్తాయి లేదా రెండూ ఉంటాయి. దురదృష్టవశాత్తు, ఈ పద్ధతుల్లో ప్రతి ఒక్కటి తప్పుగా ఉండే అవకాశం ఉంది మరియు వక్రీకరించబడిన మరియు సహాయపడని ఫలితాలకు దారి తీస్తుంది. అన్ని సందర్భాల్లోనూ వ్యతిరేక సమీకరణాలను (లేదా అధునాతన వెర్షన్) ఉపయోగించాలని గట్టిగా సలహా ఇస్తున్నారు.
అత్యంత సాధారణ తప్పుడు సత్వరమార్గాలలో కొన్ని:
1、బూడిద స్థాయిలలో సిగ్నల్ తీవ్రత vs నేపథ్య తీవ్రతను పోల్చడం. ఈ విధానం కెమెరా సున్నితత్వం, సిగ్నల్ బలం లేదా సిగ్నల్ టు నాయిస్ నిష్పత్తిని అంచనా వేయడానికి ప్రయత్నిస్తుంది, ఎందుకంటే గరిష్ట తీవ్రతను నేపథ్య తీవ్రతతో పోల్చవచ్చు. కెమెరా ఆఫ్సెట్ ప్రభావం ఏకపక్షంగా నేపథ్య తీవ్రతను సెట్ చేయగలదు, లాభం ఏకపక్షంగా సిగ్నల్ తీవ్రతను సెట్ చేయగలదు మరియు సిగ్నల్ లేదా నేపథ్యంలో శబ్దం యొక్క సహకారాన్ని పరిగణించరు కాబట్టి ఈ విధానం చాలా లోపభూయిష్టంగా ఉంది.
2、బ్యాక్గ్రౌండ్ పిక్సెల్ల వైశాల్యం యొక్క ప్రామాణిక విచలనం ద్వారా సిగ్నల్ శిఖరాలను విభజించడం. లేదా, లైన్ ప్రొఫైల్ ద్వారా వెల్లడైన నేపథ్యంలోని దృశ్య శబ్దంతో శిఖర విలువలను పోల్చడం. విభజనకు ముందు విలువల నుండి ఆఫ్సెట్ సరిగ్గా తీసివేయబడిందని ఊహిస్తే, ఈ విధానంలో అత్యంత ముఖ్యమైన ప్రమాదం నేపథ్య కాంతి ఉనికి. ఏదైనా నేపథ్య కాంతి సాధారణంగా నేపథ్య పిక్సెల్లలోని శబ్దాన్ని ఆధిపత్యం చేస్తుంది. ఇంకా, షాట్ శబ్దం వంటి ఆసక్తికర సిగ్నల్లోని శబ్దాన్ని వాస్తవానికి అస్సలు పరిగణించరు.
3、 ఆసక్తి ఉన్న పిక్సెల్లలో సగటు సిగ్నల్ vs పిక్సెల్ విలువల ప్రామాణిక విచలనం: పొరుగు పిక్సెల్లు లేదా వరుస ఫ్రేమ్లలో పీక్ సిగ్నల్ ఎంత మారుతుందో పోల్చడం లేదా గమనించడం ఇతర షార్ట్కట్ పద్ధతుల కంటే సరైనదిగా ఉండటానికి దగ్గరగా ఉంటుంది, కానీ శబ్దం నుండి ఉద్భవించని సిగ్నల్లో మార్పు వంటి విలువలను వక్రీకరించే ఇతర ప్రభావాలను నివారించే అవకాశం లేదు. పోలికలో తక్కువ పిక్సెల్ గణనలు ఉన్నందున ఈ పద్ధతి కూడా సరికాదు. ఆఫ్సెట్ విలువ యొక్క తీసివేతను కూడా మర్చిపోకూడదు.
4, ఫోటోఎలక్ట్రాన్ల తీవ్రత యూనిట్లుగా మార్చకుండా లేదా ఆఫ్సెట్ను తొలగించకుండా SNRను గణించడం: ఫోటాన్ షాట్ శబ్దం సాధారణంగా అతిపెద్ద శబ్ద మూలం మరియు కొలత కోసం కెమెరా ఆఫ్సెట్ మరియు లాభం యొక్క జ్ఞానంపై ఆధారపడి ఉంటుంది కాబట్టి, SNR గణనల కోసం ఫోటోఎలక్ట్రాన్లకు తిరిగి గణనను నివారించడం సాధ్యం కాదు.
5, కంటి ద్వారా SNR ను అంచనా వేయడం: కొన్ని పరిస్థితులలో SNR ను అంచనా వేయడం లేదా పోల్చడం ఉపయోగకరంగా ఉంటుంది, అయితే ఊహించని లోపాలు కూడా ఉన్నాయి. తక్కువ విలువ లేదా నేపథ్య పిక్సెల్ల కంటే అధిక విలువ పిక్సెల్లలో SNR ను నిర్ణయించడం కష్టం. మరింత సూక్ష్మ ప్రభావాలు కూడా పాత్ర పోషిస్తాయి: ఉదాహరణకు, వేర్వేరు కంప్యూటర్ మానిటర్లు చాలా భిన్నమైన కాంట్రాస్ట్తో చిత్రాలను రెండర్ చేయగలవు. ఇంకా, సాఫ్ట్వేర్లో వేర్వేరు జూమ్ స్థాయిలలో చిత్రాలను ప్రదర్శించడం శబ్దం యొక్క దృశ్య రూపాన్ని గణనీయంగా ప్రభావితం చేస్తుంది. వేర్వేరు ఆబ్జెక్ట్ స్పేస్ పిక్సెల్ పరిమాణాలతో కెమెరాలను పోల్చడానికి ప్రయత్నిస్తే ఇది చాలా సమస్యాత్మకం. చివరగా, నేపథ్య కాంతి ఉనికి SNR ను దృశ్యమానంగా నిర్ధారించే ఏ ప్రయత్నాన్నైనా రద్దు చేస్తుంది.
SNR యొక్క అనువర్తనాలు
SNR అనేది విస్తృత శ్రేణి అనువర్తనాలతో కూడిన సార్వత్రిక మెట్రిక్:
● ఆడియో & మ్యూజిక్ రికార్డింగ్: రికార్డింగ్ల స్పష్టత, డైనమిక్ పరిధి మరియు విశ్వసనీయతను నిర్ణయిస్తుంది.
● వైర్లెస్ కమ్యూనికేషన్: SNR నేరుగా బిట్ ఎర్రర్ రేట్లు (BER) మరియు డేటా థ్రూపుట్కు సంబంధించినది.
● శాస్త్రీయ ఇమేజింగ్: ఖగోళ శాస్త్రంలో, నేపథ్య ఆకాశ కాంతికి వ్యతిరేకంగా మసక నక్షత్రాలను గుర్తించడానికి అధిక SNR అవసరం.
● వైద్య పరికరాలు: ECG, MRI మరియు CT స్కాన్లు శారీరక శబ్దం నుండి సంకేతాలను వేరు చేయడానికి అధిక SNRపై ఆధారపడతాయి.
● కెమెరాలు & ఫోటోగ్రఫీ: తక్కువ కాంతిలో పనితీరును బెంచ్మార్క్ చేయడానికి కన్స్యూమర్ కెమెరాలు మరియు శాస్త్రీయ CMOS సెన్సార్లు రెండూ SNRని ఉపయోగిస్తాయి.
SNR ను మెరుగుపరచడం
SNR అనేది చాలా కీలకమైన కొలత కాబట్టి, దానిని మెరుగుపరచడానికి గణనీయమైన కృషి జరుగుతుంది. వ్యూహాలలో ఇవి ఉన్నాయి:
హార్డ్వేర్ విధానాలు
● తక్కువ డార్క్ కరెంట్తో మెరుగైన సెన్సార్లను ఉపయోగించండి.
● EMI తగ్గించడానికి షీల్డింగ్ మరియు గ్రౌండింగ్ వర్తించండి.
● ఉష్ణ శబ్దాన్ని అణిచివేసేందుకు కూల్ డిటెక్టర్లు.
సాఫ్ట్వేర్ విధానాలు
● అవాంఛిత ఫ్రీక్వెన్సీలను తొలగించడానికి డిజిటల్ ఫిల్టర్లను వర్తింపజేయండి.
● బహుళ ఫ్రేమ్లలో సగటును ఉపయోగించండి.
● ఇమేజింగ్ లేదా ఆడియో ప్రాసెసింగ్లో శబ్ద తగ్గింపు అల్గారిథమ్లను అమలు చేయండి.
పిక్సెల్ బిన్నింగ్ మరియు SNR పై దాని ప్రభావం
బిన్ చేయబడిన మరియు అన్బిన్ చేయబడిన కెమెరాల శబ్ద పనితీరు గణనీయంగా మారవచ్చు కాబట్టి, సిగ్నల్-టు-నాయిస్ నిష్పత్తిపై బిన్నింగ్ ప్రభావం కెమెరా టెక్నాలజీ మరియు సెన్సార్ ప్రవర్తనపై ఆధారపడి ఉంటుంది.
CCD కెమెరాలు ప్రక్కనే ఉన్న పిక్సెల్ల ఛార్జ్ను 'ఆన్-చిప్'లో సంగ్రహించగలవు. రీడౌట్ శబ్దం ఒక్కసారి మాత్రమే వస్తుంది, అయితే ప్రతి పిక్సెల్ నుండి వచ్చే డార్క్ కరెంట్ సిగ్నల్ కూడా సంగ్రహించబడుతుంది.
చాలా CMOS కెమెరాలు ఆఫ్-చిప్ బిన్నింగ్ను నిర్వహిస్తాయి, అంటే విలువలను మొదట కొలుస్తారు (మరియు రీడ్ నాయిస్ ప్రవేశపెట్టబడుతుంది), ఆపై డిజిటల్గా సంగ్రహిస్తారు. అటువంటి సమ్మషన్ల కోసం రీడ్ నాయిస్, సంగ్రహించబడిన పిక్సెల్ల సంఖ్య యొక్క వర్గమూలం ద్వారా గుణించడం ద్వారా పెరుగుతుంది, అంటే 2x2 బిన్నింగ్ కోసం 2 కారకం ద్వారా.
సెన్సార్ల శబ్ద ప్రవర్తన సంక్లిష్టంగా ఉంటుంది కాబట్టి, పరిమాణాత్మక అనువర్తనాల కోసం బిన్డ్ మోడ్లో కెమెరా యొక్క ఆఫ్సెట్, గెయిన్ మరియు రీడ్ నాయిస్ను కొలవడం మంచిది మరియు సిగ్నల్-టు-నాయిస్ నిష్పత్తి సమీకరణం కోసం ఈ విలువలను ఉపయోగించడం మంచిది.
ముగింపు
సైన్స్, ఇంజనీరింగ్ మరియు టెక్నాలజీలో సిగ్నల్-టు-నాయిస్ నిష్పత్తి (SNR) అత్యంత ముఖ్యమైన కొలమానాల్లో ఒకటి. ఫోన్ కాల్స్లో స్పష్టతను నిర్వచించడం నుండి సుదూర గెలాక్సీలను గుర్తించడం వరకు, SNR కొలత మరియు కమ్యూనికేషన్ వ్యవస్థల నాణ్యతను బలపరుస్తుంది. SNRలో నైపుణ్యం సాధించడం అంటే సూత్రాలను గుర్తుంచుకోవడం మాత్రమే కాదు - ఇది అంచనాలు, పరిమితులు మరియు వాస్తవ-ప్రపంచ ట్రేడ్-ఆఫ్లను అర్థం చేసుకోవడం. ఈ దృక్కోణం నుండి, ఇంజనీర్లు మరియు పరిశోధకులు శబ్దం లేని పరిస్థితులలో కూడా అర్థవంతమైన అంతర్దృష్టులను సేకరించే మరింత నమ్మదగిన కొలతలు మరియు డిజైన్ వ్యవస్థలను చేయవచ్చు.
మరింత తెలుసుకోవాలనుకుంటున్నారా? సంబంధిత కథనాలను చూడండి:
టక్సెన్ ఫోటోనిక్స్ కో., లిమిటెడ్. అన్ని హక్కులూ ప్రత్యేకించుకోవడమైనది. ఉదహరించేటప్పుడు, దయచేసి మూలాన్ని గుర్తించండి:www.టక్సెన్.కామ్








