 25/09/11
25/09/11Trong bất kỳ hệ thống đo lường nào — từ truyền thông không dây đến nhiếp ảnh kỹ thuật số — tỷ lệ tín hiệu trên nhiễu (SNR) là một chuẩn mực cơ bản về chất lượng. Cho dù bạn đang phân tích hình ảnh từ kính viễn vọng, cải thiện bản ghi âm từ micro hay xử lý sự cố liên kết không dây, SNR cho bạn biết mức độ thông tin hữu ích nổi bật so với nhiễu nền không mong muốn.
Tuy nhiên, việc tính toán SNR chính xác không phải lúc nào cũng dễ dàng. Tùy thuộc vào hệ thống, các yếu tố bổ sung như dòng tối, nhiễu đọc hoặc phân tách điểm ảnh (pixel binning) có thể cần được xem xét. Hướng dẫn này sẽ hướng dẫn bạn về lý thuyết, công thức cốt lõi, các lỗi thường gặp, ứng dụng và các phương pháp thực tế để cải thiện SNR, đảm bảo bạn có thể áp dụng chính xác trong nhiều bối cảnh khác nhau.
Tỷ lệ tín hiệu trên nhiễu (SNR) là gì?
Về cơ bản, tỷ lệ tín hiệu trên nhiễu đo lường mối quan hệ giữa cường độ của tín hiệu mong muốn và tiếng ồn nền làm lu mờ tín hiệu đó.
● Tín hiệu = thông tin có ý nghĩa (ví dụ: giọng nói trong cuộc gọi, ngôi sao trong hình ảnh kính viễn vọng).
● Nhiễu = các biến động ngẫu nhiên, không mong muốn làm méo hoặc che giấu tín hiệu (ví dụ: tĩnh điện, nhiễu cảm biến, nhiễu điện).
Về mặt toán học, SNR được định nghĩa như sau:

Vì các tỷ lệ này có thể thay đổi theo nhiều cấp độ nên SNR thường được biểu thị bằng decibel (dB):
● SNR cao (ví dụ: 40 dB): tín hiệu chiếm ưu thế, mang lại thông tin rõ ràng và đáng tin cậy.
● SNR thấp (ví dụ: 5 dB): nhiễu lấn át tín hiệu, khiến việc giải thích trở nên khó khăn.
Cách tính SNR
Việc tính toán tỷ số tín hiệu trên nhiễu có thể được thực hiện với các mức độ chính xác khác nhau tùy thuộc vào nguồn nhiễu nào được đưa vào. Trong phần này, hai dạng sẽ được giới thiệu: một dạng tính đến dòng tối và một dạng giả định rằng nó có thể được bỏ qua.
Lưu ý: Việc cộng các giá trị nhiễu độc lập yêu cầu phải cộng chúng theo phương pháp tích phân. Mỗi nguồn nhiễu được bình phương, cộng lại và lấy căn bậc hai của tổng.
Tỷ lệ tín hiệu trên nhiễu với dòng tối
Sau đây là phương trình được sử dụng trong trường hợp nhiễu dòng tối đủ lớn để cần phải đưa vào:

Sau đây là định nghĩa của các thuật ngữ:
Tín hiệu (e-): Đây là tín hiệu quan tâm trong quang điện tử, với tín hiệu dòng tối được trừ đi

Tổng tín hiệu (e-) sẽ là số lượng quang điện tử trong điểm ảnh quan tâm – hoàn toàn không phải là giá trị điểm ảnh tính theo đơn vị mức xám. Trường hợp thứ hai của Tín hiệu (e-), ở cuối phương trình, là nhiễu photonshot.
Dòng điện tối (DC):Giá trị hiện tại tối cho pixel đó.
t: Thời gian phơi sáng tính bằng giây
σr:Đọc tiếng ồn ở chế độ camera.
Tỷ lệ tín hiệu trên nhiễu đối với dòng điện tối không đáng kể
Trong trường hợp ngắn (Thời gian phơi sáng < 1 giây), cộng với máy ảnh hiệu suất cao được làm mát, nhiễu dòng tối thường sẽ thấp hơn nhiều so với nhiễu đọc và có thể bỏ qua một cách an toàn.
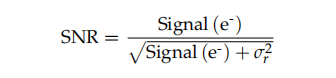
Trong đó các thuật ngữ một lần nữa được định nghĩa như trên, ngoại trừ tín hiệu dòng tối không cần phải được tính toán và trừ đi khỏi tín hiệu vì nó phải bằng không.
Những hạn chế của các công thức này và các điều khoản còn thiếu
Các công thức đối diện sẽ chỉ cung cấp câu trả lời đúng cho CCD vàMáy ảnh CMOS. Thiết bị EMCCD và thiết bị tăng cường tạo ra các nguồn nhiễu bổ sung, do đó không thể sử dụng các phương trình này. Để có một phương trình tỷ số tín hiệu trên nhiễu hoàn chỉnh hơn, hãy tính đến những nguồn nhiễu này và các nguồn nhiễu khác.
Một thuật ngữ nhiễu khác thường được (hoặc đã từng được) đưa vào các phương trình SNR là độ không đồng đều đáp ứng quang (PRNU), đôi khi còn được gọi là "nhiễu mẫu cố định" (FPN). Điều này thể hiện sự không đồng đều về độ khuếch đại và đáp ứng tín hiệu trên toàn bộ cảm biến, có thể trở nên chiếm ưu thế ở tín hiệu cao nếu đủ lớn, làm giảm SNR.
Trong khi các máy ảnh đời đầu có PRNU đủ quan trọng để yêu cầu đưa nó vào, hầu hết các máy ảnh hiện đạimáy ảnh khoa họccó PRNU đủ thấp để đóng góp của nó thấp hơn nhiều so với nhiễu photon, đặc biệt là sau khi áp dụng các hiệu chỉnh tích hợp. Do đó, hiện nay, PRNU thường bị bỏ qua trong các tính toán SNR. Tuy nhiên, PRNU vẫn quan trọng đối với một số máy ảnh và ứng dụng, và được đưa vào phương trình SNR nâng cao hơn để hoàn thiện. Điều này có nghĩa là các phương trình được cung cấp hữu ích cho hầu hết các hệ thống CCD/CMOS nhưng không nên được coi là có thể áp dụng phổ biến.
Các loại nhiễu trong tính toán SNR
Việc tính toán SNR không chỉ đơn thuần là so sánh tín hiệu với một giá trị nhiễu duy nhất. Trên thực tế, có nhiều nguồn nhiễu độc lập góp phần tạo nên điều này, và việc hiểu rõ chúng là điều cần thiết.
Tiếng ồn của Shot
● Nguồn gốc: sự xuất hiện thống kê của các photon hoặc electron.
● Tỷ lệ thuận với căn bậc hai của tín hiệu.
● Chiếm ưu thế trong chụp ảnh giới hạn bởi photon (thiên văn học, kính hiển vi huỳnh quang).
Tiếng ồn nhiệt
● Nó còn được gọi là nhiễu Johnson–Nyquist, được tạo ra bởi chuyển động của electron trong điện trở.
● Tăng theo nhiệt độ và băng thông.
● Quan trọng trong điện tử và truyền thông không dây.
Tiếng ồn dòng điện tối
● Sự thay đổi ngẫu nhiên của dòng điện tối bên trong các cảm biến.
● Quan trọng hơn trong các máy dò phơi sáng lâu hoặc ấm.
● Giảm bằng cách làm mát cảm biến.
Đọc tiếng ồn
● Tiếng ồn từ bộ khuếch đại và chuyển đổi tín hiệu tương tự sang tín hiệu số.
● Cố định trên mỗi lần đọc, rất quan trọng trong chế độ tín hiệu yếu.
Tiếng ồn lượng tử hóa
● Được giới thiệu bằng cách số hóa (làm tròn đến mức rời rạc).
● Quan trọng trong các hệ thống có độ sâu bit thấp (ví dụ: âm thanh 8 bit).
Tiếng ồn môi trường/hệ thống
● EMI, nhiễu xuyên âm, gợn sóng nguồn điện.
● Có thể chiếm ưu thế nếu khả năng che chắn/tiếp đất kém.
Hiểu được yếu tố nào chiếm ưu thế sẽ giúp lựa chọn công thức và phương pháp giảm thiểu phù hợp.
Những sai lầm thường gặp khi tính SNR
Rất dễ dàng tìm thấy nhiều phương pháp "ngắn gọn" để ước tính tỷ lệ tín hiệu trên nhiễu trong chụp ảnh. Những phương pháp này thường ít phức tạp hơn các phương trình đối diện, cho phép suy ra kết quả dễ dàng hơn từ chính hình ảnh thay vì đòi hỏi phải biết các thông số của máy ảnh như nhiễu đọc, hoặc cả hai. Đáng tiếc là, rất có thể mỗi phương pháp này đều không chính xác và sẽ dẫn đến kết quả bị sai lệch và không hữu ích. Chúng tôi đặc biệt khuyến nghị nên sử dụng các phương trình đối diện (hoặc phiên bản nâng cao) trong mọi trường hợp.
Một số lối tắt sai lầm phổ biến nhất bao gồm:
1、So sánh cường độ tín hiệu với cường độ nền, theo mức xám. Phương pháp này cố gắng đánh giá độ nhạy của camera, cường độ tín hiệu hoặc tỷ lệ tín hiệu trên nhiễu bằng cách so sánh cường độ đỉnh với cường độ nền. Phương pháp này có nhiều sai sót nghiêm trọng vì ảnh hưởng của độ lệch camera có thể tùy ý thiết lập cường độ nền, độ khuếch đại có thể tùy ý thiết lập cường độ tín hiệu, và không xem xét đến sự đóng góp của nhiễu trong tín hiệu hoặc nền.
2、Chia các đỉnh tín hiệu cho độ lệch chuẩn của một vùng điểm ảnh nền. Hoặc, so sánh các giá trị đỉnh với nhiễu thị giác trong nền được hiển thị bởi đường nét. Giả sử độ lệch được trừ chính xác khỏi các giá trị trước khi chia, mối nguy hiểm đáng kể nhất trong phương pháp này là sự hiện diện của ánh sáng nền. Bất kỳ ánh sáng nền nào cũng thường sẽ chi phối nhiễu trong các điểm ảnh nền. Hơn nữa, nhiễu trong tín hiệu quan tâm, chẳng hạn như nhiễu ảnh, thực tế không được xem xét.
3、Tín hiệu trung bình theo pixel quan tâm so với độ lệch chuẩn của giá trị pixel: Việc so sánh hoặc quan sát mức độ thay đổi của tín hiệu đỉnh trên các pixel lân cận hoặc các khung hình liên tiếp gần đúng hơn so với các phương pháp rút gọn khác, nhưng khó có thể tránh khỏi các ảnh hưởng khác làm sai lệch giá trị, chẳng hạn như sự thay đổi tín hiệu không bắt nguồn từ nhiễu. Phương pháp này cũng có thể không chính xác do số lượng pixel trong phép so sánh thấp. Việc trừ đi giá trị offset cũng không được quên.
4、Tính toán SNR mà không cần chuyển đổi sang đơn vị cường độ của quang điện tử hoặc không loại bỏ độ lệch: Vì nhiễu của photon thường là nguồn nhiễu lớn nhất và dựa vào kiến thức về độ lệch và độ khuếch đại của camera để đo lường nên không thể tránh khỏi việc tính toán ngược lại quang điện tử để tính toán SNR.
5、Đánh giá SNR bằng mắt: Mặc dù trong một số trường hợp, việc đánh giá hoặc so sánh SNR bằng mắt có thể hữu ích, nhưng cũng có những cạm bẫy không ngờ tới. Việc đánh giá SNR ở các điểm ảnh có giá trị cao có thể khó khăn hơn so với các điểm ảnh có giá trị thấp hơn hoặc ở nền. Những hiệu ứng tinh tế hơn cũng có thể đóng một vai trò: Ví dụ, các màn hình máy tính khác nhau có thể hiển thị hình ảnh với độ tương phản rất khác nhau. Hơn nữa, việc hiển thị hình ảnh ở các mức thu phóng khác nhau trong phần mềm có thể ảnh hưởng đáng kể đến hình ảnh nhiễu. Điều này đặc biệt gây khó khăn khi so sánh các máy ảnh có kích thước điểm ảnh không gian vật thể khác nhau. Cuối cùng, sự hiện diện của ánh sáng nền có thể làm mất hiệu lực bất kỳ nỗ lực nào để đánh giá SNR bằng mắt.
Ứng dụng của SNR
SNR là một số liệu phổ biến có nhiều ứng dụng:
● Ghi âm thanh và nhạc: Xác định độ rõ nét, dải động và độ trung thực của bản ghi âm.
● Truyền thông không dây: SNR liên quan trực tiếp đến tỷ lệ lỗi bit (BER) và thông lượng dữ liệu.
● Chụp ảnh khoa học: Trong thiên văn học, việc phát hiện các ngôi sao mờ trên nền trời sáng cần có SNR cao.
● Thiết bị y tế: Điện tâm đồ, MRI và CT dựa vào SNR cao để phân biệt tín hiệu với nhiễu sinh lý.
● Máy ảnh & Nhiếp ảnh: Máy ảnh tiêu dùng và cảm biến CMOS khoa học đều sử dụng SNR để đánh giá hiệu suất trong điều kiện ánh sáng yếu.
Cải thiện SNR
Vì SNR là một thước đo quan trọng nên cần phải nỗ lực đáng kể để cải thiện nó. Các chiến lược bao gồm:
Phương pháp tiếp cận phần cứng
● Sử dụng cảm biến tốt hơn với dòng điện tối thấp hơn.
● Áp dụng che chắn và nối đất để giảm EMI.
● Làm mát các đầu dò để ngăn chặn nhiễu nhiệt.
Phương pháp tiếp cận phần mềm
● Áp dụng bộ lọc kỹ thuật số để loại bỏ tần số không mong muốn.
● Sử dụng tính trung bình trên nhiều khung hình.
● Sử dụng thuật toán giảm nhiễu trong xử lý hình ảnh hoặc âm thanh.
Pixel Binning và tác động của nó lên SNR
Tác động của việc phân loại lên tỷ lệ tín hiệu trên nhiễu phụ thuộc vào công nghệ camera và hành vi của cảm biến, vì hiệu suất nhiễu của camera phân loại và không phân loại có thể thay đổi đáng kể.
Camera CCD có thể cộng điện tích của các điểm ảnh liền kề 'trên chip'. Nhiễu đọc chỉ phát sinh một lần, mặc dù tín hiệu dòng tối từ mỗi điểm ảnh cũng sẽ được cộng lại.
Hầu hết các máy ảnh CMOS đều thực hiện phân loại ngoài chip, nghĩa là các giá trị được đo trước (nhiễu đọc được đưa vào), sau đó được cộng lại bằng kỹ thuật số. Nhiễu đọc cho các phép cộng như vậy tăng lên theo phép nhân với căn bậc hai của số điểm ảnh được cộng lại, tức là tăng gấp 2 lần đối với phân loại 2x2.
Vì hành vi nhiễu của cảm biến có thể phức tạp, đối với các ứng dụng định lượng, nên đo độ lệch, độ khuếch đại và độ nhiễu đọc của camera ở chế độ phân loại và sử dụng các giá trị này cho phương trình tỷ lệ tín hiệu trên nhiễu.
Phần kết luận
Tỷ số tín hiệu trên nhiễu (SNR) là một trong những chỉ số quan trọng nhất trong khoa học, kỹ thuật và công nghệ. Từ việc xác định độ rõ nét của các cuộc gọi điện thoại đến việc cho phép phát hiện các thiên hà xa xôi, SNR là nền tảng cho chất lượng của các hệ thống đo lường và truyền thông. Nắm vững SNR không chỉ là việc ghi nhớ các công thức — mà còn là việc hiểu các giả định, hạn chế và sự đánh đổi trong thế giới thực. Từ góc độ này, các kỹ sư và nhà nghiên cứu có thể thực hiện các phép đo đáng tin cậy hơn và thiết kế các hệ thống có thể rút ra những hiểu biết có ý nghĩa ngay cả trong điều kiện nhiễu.
Muốn tìm hiểu thêm? Hãy xem các bài viết liên quan:
Công ty TNHH Tucsen Photonics. Bản quyền thuộc về. Vui lòng ghi rõ nguồn khi trích dẫn:www.tucsen.com








