
 27. 12. 2025
27. 12. 2025Při pořizování snímku je klíčová přesná kontrola doby expozice. Nastavení fotoaparátu sice umožňuje definovat dobu expozice, ale samotný fotoelektrický jev nelze přímo zapnout ani vypnout. Fotony dopadající na pixel snímače budou nepřetržitě generovat fotoelektrony a tyto náboje se budou hromadit v jamce pixelu, pokud neexistuje mechanismus, který by definoval, kdy integrace začíná a končí.
Uzávěrka je mechanismus, který tuto kontrolu provádí. U vědeckých fotoaparátů se uzávěrka neomezuje pouze na blokování světla – definuje efektivní časové okno, během kterého mohou fotoelektrony přispívat k měřenému signálu. Způsob, jakým je toto okno implementováno, ať už mechanicky nebo elektronicky, a zda je aplikováno rovnoměrně na celý snímač nebo postupně v čase, má přímé důsledky pro zkreslení obrazu, synchronizaci a kvantitativní přesnost.
Tento článek zkoumá, jak je clonění implementováno ve vědeckých zobrazovacích kamerách, praktické rozdíly mezi rolovacím a globálním cloněním a jak tyto volby ovlivňují reálné zobrazovací aplikace.
Co je to clonění u vědeckých kamer?
Ve vědeckém zobrazování definuje uzávěrka časový interval, během kterého mohou fotoelektrony generované v senzoru přispívat k měřenému obrazovému signálu. Protože příchod fotonů a generování fotoelektronů probíhá nepřetržitě, uzávěrka neřídí, kdy světlo dosáhne senzoru – řídíkdy je nahromaděný náboj považován za platný údaj.
Na úrovni pixelu se fotoelektrony budou v pixelové jamce nadále hromadit, pokud aktivní mechanismus nestanoví jasný začátek a konec integrace. Tuto časovou bránu poskytuje uzávěrka, která definuje efektivní expoziční okno pro každý snímek obrazu.
Důležité je, že bednění vvědecké kameryje spíše funkcí na úrovni systému než jednoduchým nastavením expozice. Je určena architekturou senzoru a časováním odečtu a může být aplikována buď rovnoměrně na celý senzor, nebo postupně v čase. Tyto rozdíly ovlivňují časové zarovnání v obrazu a mohou způsobit zkreslení, problémy se synchronizací nebo časové posuny, které jsou kritické ve vědeckých a kvantitativních zobrazovacích aplikacích.
Jak se provádí bednění: Mechanické vs. elektronické
Mechanické okenice

Obrázek 1. Mechanická závěrka
Mechanická závěrka se používá k fyzickému zablokování většího množství světla, které by se dostalo k senzoru a ukončilo se tak expozice snímku, a umožňuje tak proces čtení snímku probíhat ve tmě. Jejich pohyby se často odehrávají rychleji, než lidské oko dokáže zaznamenat.
Historicky bylo nežádoucí světlo na snímači blokováno mechanickou závěrkou, která fyzicky zakrývala detektor před expozicí a po ní. V takových systémech se závěrka otevře na začátku zvoleného času expozice a znovu se zavře, aby se integrace ukončila. Tento přístup je stále běžný u mnoha spotřebitelských digitálních zrcadlovek a bezzrcadlovek.
Ve vědeckém zobrazování však mechanické závěrky představují zásadní omezení. Přítomnost pohyblivých částí způsobuje vibrace, omezuje opakovací frekvenci a ukládá omezení údržby a životnosti. A co je důležitější, mechanické závěrky se špatně hodí pro krátké expozice, vysoké snímkové frekvence a přesné řízení časování, které je vyžadováno v mnoha vědeckých aplikacích. V důsledku toho se v moderních vědeckých fotoaparátech zřídka používají jako primární mechanismus řízení expozice.
Elektronické okenice
Elektronická závěrka řeší tato omezení řízením expozice na úrovni pixelů pomocí tranzistorů integrovaných do architektury senzoru. Elektronické závěrky místo fyzického blokování světla řídí tok fotoelektronů v každém pixelu.
Tím, že fungují jako elektronicky řízené spínače, mohou pixelové tranzistory směrovat nashromážděný náboj do země (resetování pixelu), do úložiště nebo maskované oblasti (jako u globálního senzoru závěrkys) nebo do odečítacího obvodu pro měření. Tímto způsobem elektronická závěrka přesouvá řízení expozice z mechanické bariéry napřesné, vysokorychlostní řízení časování v oblasti náboje, což umožňuje expoziční strategie potřebné pro moderní vědecké zobrazování.
Rolovací vs. globální závěrka: Rozdíly v načasování a expozici
Elektronická závěrka definuje, jak se expozice aplikuje na snímač v čase. U vědeckých zobrazovacích fotoaparátů jsou dvěma dominantními strategiemi časování rolovací závěrka a globální závěrka a rozdíl mezi nimi nespočívá v délce trvání expozice, alekdyž jsou různé pixely exponovány vůči sobě navzájem.
Rolovací závěrka
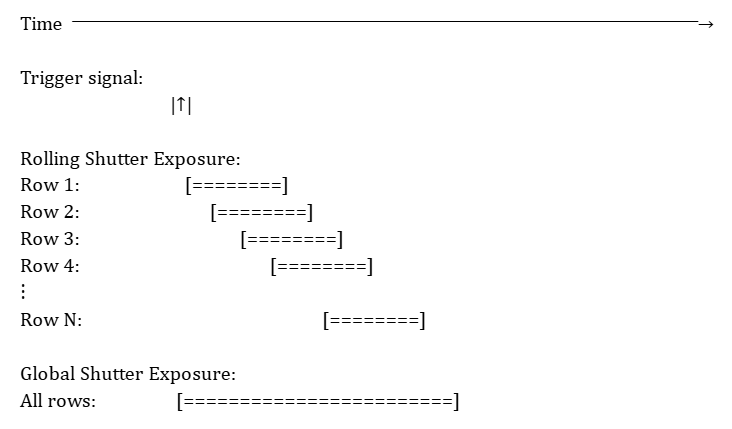
V architektuře rolovací závěrky se expozice aplikuje postupně, obvykle řádek po řádku. Každá řada pixelů začíná a končí svou integraci v mírně odlišném čase, po pevném časovém posunu, kdy se závěrka „roluje“ po snímači. Ačkoli všechny řady mohou sdílet stejnou nominální dobu expozice, jejich integrační okna jsou…časově nesouladné napříč senzorem.
Toto sekvenční časování má několik důležitých důsledků. Pohyb ve scéně nebo změny osvětlení během čtení mohou vést ke geometrickým zkreslením, zkosení nebo pruhovým artefaktům. Ve statických nebo pomalu se měnících scénách však mohou být tyto efekty zanedbatelné. Konstrukce s rolovací závěrkou jsou také často upřednostňovány pro své jednodušší pixelové struktury, které mohou nabídnout vyšší faktor výplně a citlivost – výhody, které jsou obzvláště důležité ve vědeckých aplikacích za slabého osvětlení.
Globální závěrka
Globální závěrka aplikuje expoziční okno na všechny pixely současně. Každý pixel začíná integrovat ve stejném okamžiku a ve stejném okamžiku integrovat přestává, čímž je zajištěna časová uniformita v celém obrazu. Tento přístup zachovává geometrickou integritu při zobrazování rychle se pohybujících objektů nebo v případě, že je vyžadováno přesné časové sladění.
Aby toho bylo dosaženo, senzory s globální závěrkou obvykle obsahují další obvody v pixelech, jako jsou uzly pro ukládání náboje nebo maskované oblasti, které umožňují dočasné zadržení shromážděných fotoelektronů před načtením. I když tato zvýšená složitost může snížit efektivní činitel vyplnění nebo citlivost ve srovnání s konstrukcemi s postupnou závěrkou, poskytuje deterministické časování, které je nezbytné pro vysokorychlostní zobrazování, synchronizované osvětlení a systémy s více kamerami.
Jak rolovací, tak i globální expoziční metoda představují různé přístupy k aplikaci časování expozice napříč senzorem, přičemž každý z nich zahrnuje kompromisy v časovém zarovnání, citlivosti a složitosti pixelů. V moderních vědeckých fotoaparátech se tyto strategie expozice nejčastěji realizují jakoElektronické závěrky CMOS, kde je časové chování úzce spjato s architekturou pixelů a návrhem čtecího zařízení.
Artefakty rolovací závěrky: Kdy na nich záleží?
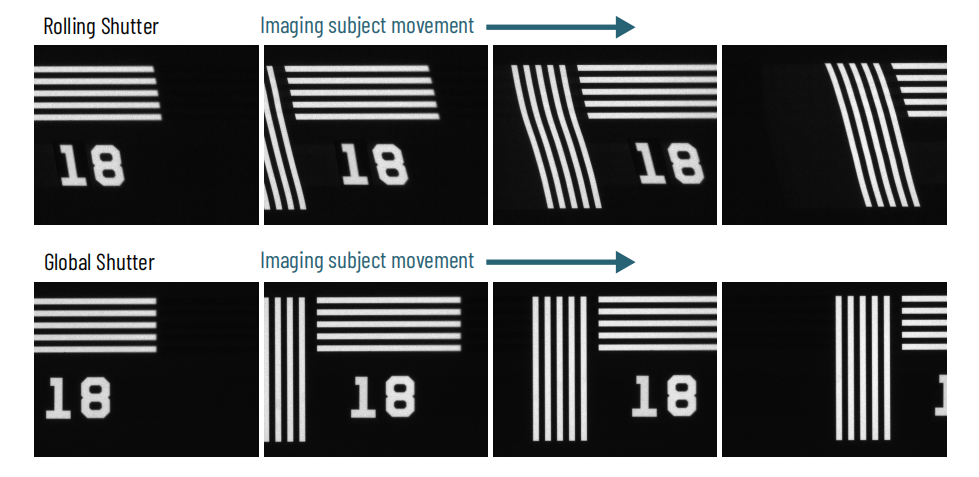
Obrázek 2. Artefakty rolující závěrky způsobené pohybujícím se objektem snímku
Tento testovací snímek se pohybuje zleva doprava kolem fotoaparátu rychlostí, která je dostatečně rychlá na to, aby způsobila artefakty rolující závěrky: v době, kdy se rolující závěrka přesune na další řádek pixelů, se obsah tohoto řádku posunul o značnou vzdálenost.
V mnoha aplikacích pracuje rolovací závěrka příliš rychle, než aby byla vnímatelná nebo aby někdy představovala problém. Ve statických scénách nebo tam, kde se změny pohybu a osvětlení odehrávají pomalu vzhledem k načasování senzoru, se artefakty rolovací závěrky, jako napříkladgeometrické zkosení, zkreslení, nebopruhováníse to ale nikdy nemusí stát problémem. Pro jiné je však globální chování závěrky zásadní.
Představu o tom, zda by rolovací závěrka rušila vaši zobrazovací aplikaci, lze získat výpočtem časování senzoru. Většina senzorů sCMOS má dobu řádku mezi 5 a 20 μs, v závislosti na rychlosti kamery. Zpoždění mezi libovolnými dvěma řádky je dáno počtem řádků mezi nimi vynásobeným dobou řádku. Maximální zpoždění mezi horní a dolní částí senzoru je jednoduše dáno inverzní hodnotou snímkové frekvence – např. 10 ms pro senzor s 100 snímky za sekundu.
Artefakty rolovací závěrky se stávají relevantními, když dochází ke změnám pohybu scény nebo osvětlení v časových měřítcích srovnatelných s těmito zpožděními na úrovni řádků nebo snímků. Pokud by tato úroveň zpoždění, ať už na délkové škále jednotlivých řádků nebo na délkové škále celého senzoru, mohla rušit vaše zobrazování, je vhodné vypočítat přesné hodnoty zpoždění pro váš senzor v režimu, který chcete použít.
Minimální limity expoziční doby u senzorů s rolovací závěrkou
Snímače s rolovací závěrkou nezabraňují krátkým expozičním časům na úrovni jednotlivých řádků. U aplikací, které vyžadují krátký expoziční čas, mohou kamery s rolovací závěrkou způsobovat problémy, pokud není možné použít pseudoglobální expozici. I když minimální doba, po kterou každý řádek exponuje, je čas řádku, tyto expozice začínají pro každý řádek postupně.
Skutečný čas, po který fotoaparát exponuje, je dán dobou expozice plus dobou potřebnou k zasunutí snímače. Kamery s rolovací závěrkou mají proto „efektivní“ minimální dobu expozice rovnou času pořízení snímku.
Toto rozlišení je obzvláště důležité pro aplikace zahrnující pulzní osvětlení, rychlé přechodové jevy nebo požadavky na přesnou synchronizaci. V takových případech není omezením schopnost expozice na řádek, ale rozšířené časové pokrytí obrazu jako celku, což může komplikovat časové zarovnání a vést k nechtěné integraci signálu.
Režim globálního resetu: Praktická alternativa ke skutečné globální závěrce
Některé vědecké kamery s rolovací závěrkou mají režim „globálního resetu“, nazývaný také „globální resetování“ (GRR). To umožňuje kameře spustit expozici každého řádku současně – konec expozice však končí postupně, jak je u kamer s rolovací závěrkou obvyklé. To může zajistit výrazně rychlejší dobu odezvy při synchronizaci záběrů kamery s externími událostmi.
Díky zarovnání začátku integrace napříč senzorem může režim globálního resetu výrazně snížit časovou nejistotu při synchronizaci snímání z kamery s externími událostmi. Díky tomu je obzvláště užitečný pro aplikace zahrnujícíexterní spouštěče, pulzní osvětlení, neborychlé přechodné jevykde je latence odezvy kritická.
Globální reset by se však neměl zaměňovat se skutečným chováním globální závěrky. Protože k ukončení expozice stále dochází postupně, jednotlivé řádky mají různé efektivní expoziční časy, pokud není osvětlení pečlivě řízeno. V pseudoglobálním režimu závěrky je rovnoměrné expozice v celém obrazu dosaženo pouze tehdy, když je zdroj světla řízen nebo pulzován tak, aby definoval společné expoziční okno pro všechny řádky.
Režim globálního resetu proto představuje praktický kompromis: zlepšuje synchronizační výkon a snižuje určitá omezení rolovací závěrky, ale inherentně neposkytuje jednotnou expozici ani geometrickou integritu skutečného senzoru globální závěrky.
Zavírání, spouštění a synchronizace
Ve vědeckých zobrazovacích systémech nefunguje závěrka izolovaně. Je úzce spjata s tím, jak kamera reaguje na spouště a jak se její časování expozice sladí s externími zařízeními, jako jsou světelné zdroje, lasery, pohyblivé stolky nebo jiné kamery. Pochopení této interakce je nezbytné pro dosažení spolehlivé synchronizace a opakovatelných měření.
Interní a externí spouštění
Spouštěč definuje, kdy začíná snímání obrazu, ale sám o sobě nedefinuje, jak je expozice aplikována na snímač. Při interním spouštění si kamera řídí vlastní časování na základě interních hodin, což nabízí stabilní intervaly mezi snímky, ale omezenou koordinaci s externími událostmi. Externí spouštění umožňuje kameře reagovat na signály z jiných systémových komponent, což umožňuje přesné sladění mezi expozicí a experimentálními událostmi.
Účinnost externího spouštění silně závisí na strategii spouštění. U kamer s postupnou závěrkou obvykle spouští spouštěč expozici pro první řádek, po kterém postupně probíhá integrace napříč celým snímačem. U kamer s globální závěrkou stejný spouštěč spouští expozici současně pro všechny pixely, čímž vzniká dobře definovaný časový vztah mezi spouštěcí událostí a celým obrazem.
Obrázek 3. Časování spouště a expozice u kamer s rolovací a globální závěrkou
Zarovnání časování a latence
Latence spouště a časový determinismus jsou často důležitější než nominální doba expozice. I když jsou dva fotoaparáty nastaveny na stejný expoziční čas, rozdíly v implementaci závěrky mohou vést k významným časovým posunům v rámci snímků nebo mezi nimi.
Funkce rolovací závěrky zavádí inherentní časové rozpětí v celém snímku, které může komplikovat synchronizaci při zobrazování rychlých událostí nebo koordinaci s pulzním osvětlením. Globální senzory závěrky eliminují toto časové rozpětí v rámci snímku, což je činí velmi vhodnými pro aplikace, kde je vyžadováno přesné časové zarovnání v celém snímku nebo mezi více kamerami.
Režimy globálního resetu nabízejí částečné řešení tím, že zarovnávají začátek expozice ve všech řádcích, čímž se snižuje latence mezi spuštěním a expozicí. Protože však k ukončení expozice stále dochází postupně, je jednotného načasování v celém snímku dosaženo pouze tehdy, je-li osvětlení přesně řízeno.
Synchronizace s osvětlením a externími zařízeními
Mnoho vědeckých zobrazovacích aplikací se spoléhá na synchronizované osvětlení spíše než na nepřetržité světlo. V těchto systémech je interakce mezi časováním závěrky a osvětlení kritická. U senzorů s postupnou závěrkou může nekontrolované osvětlení vést k nerovnoměrné expozici napříč řadami, zatímco pulzní nebo řízené světelné zdroje lze použít k definování společného efektivního expozičního okna.
Globální závěrkové kamery zjednodušují synchronizaci tím, že umožňují přímé sladění osvětlovacího impulsu s jediným expozičním intervalem v celém snímači. Toto deterministické chování je obzvláště důležité pro laserové zobrazování, vysokorychlostní jevy a konfigurace s více kamerami, kde konzistence časování přímo ovlivňuje platnost dat.
Výkon synchronizace v konečném důsledku není určen pouze spouštěcím signálem, ale také tím, jak spolupracují závěrka, načasování odečtu a řízení osvětlení jako systém. Výběr vhodné strategie závěrky proto vyžaduje zvážení nejen expozičních požadavků, ale také toho, jak bude kamera interagovat s širším experimentálním nastavením.
Výběr správné strategie bednění pro vaši aplikaci
Výběr vhodné strategie expozice je v konečném důsledku otázkou časových požadavků, nikoli prosté preference mezi rolovací nebo globální závěrkou. Správná volba závisí na tom, jak načasování expozice, pohyb, osvětlení a synchronizace interagují v rámci konkrétního zobrazovacího systému.
Spíše než zacházet s režimy clonění jako s univerzálně „lepšími“ nebo „horšími“, je užitečnější je vyhodnotit podle malého souboru praktických kritérií.
Kdy stačí rolovací závěrka
Kamery s rolovací závěrkou se dobře hodí pro aplikace, kde je dynamika scény pomalá v porovnání s časováním senzoru a kde není vyžadováno striktní časové zarovnání v celém obrazu.
Mezi typické příklady patří:
● Statické nebo kvazistatické vzorky
● Pomalý mechanický pohyb
● Nepřetržité osvětlení
● Snímání za slabého osvětlení, kde je citlivost kritická
V těchto případech často poskytuje operace s rolovací závěrkou výhody v efektivitě pixelů a poměru signálu k šumu, zatímco artefakty a časové posuny zůstávají zanedbatelné.
Když je globální závěrka nezbytná
Globální závěrka je nezbytná, kdyžčasová konzistence v celém obrazuje kritické pro integritu dat.
Mezi aplikace, které obvykle vyžadují skutečné globální chování závěrky, patří:
● Rychle se pohybující objekty nebo rychlá deformace
● Synchronizace více kamer
● Laserové nebo stroboskopické osvětlení
● Kvantitativní měření, u kterých nelze tolerovat geometrické zkreslení
V těchto scénářích současný začátek a konec expozice napříč všemi pixely zajišťuje deterministické načasování a zachovává prostorovou přesnost.
Kde globální reset poskytuje praktický kompromis
Režimy globálního resetu mohou nabídnout užitečnou střední cestu, pokud nejsou k dispozici nebo praktické senzory globální závěrky.
Tento přístup je obzvláště účinný, když:
● Je vyžadována přesná latence od spuštění do expozice
● Osvětlení lze přesně regulovat nebo pulzovat
● Krátká doba odezvy je důležitější než rovnoměrné ukončení expozice
Globální reset by však neměl být považován za přímou náhradu za skutečnou globální operaci závěrky, pokud není explicitně spravováno načasování osvětlení.
Praktická perspektiva výběru
V praxi by mělo být časování vybíráno jako součást strategie časování na úrovni systému, spíše než jako izolovaná funkce fotoaparátu. Doba expozice, snímková frekvence, chování spouště, ovládání osvětlení a architektura senzoru – to vše přispívá k tomu, jak je čas kódován do obrazových dat.
Užitečným pravidlem je:
● Pokudzáleží na tom, co se stane v rámci jednoho snímku, upřednostnit globální závěrku.
● PokudTo, co se děje mezi snímky, je důležitější, rolovací závěrka může být zcela postačující.
● Pokudnejdůležitější je doba odezvy spouště, globální reset může nabídnout smysluplné výhody.
Díky tomu, že se clonění chápe jako načasovací rozhodnutí, nikoli jako kategorická volba, lze zobrazovací systémy navrhnout tak, aby efektivněji vyvažovaly výkon, složitost a spolehlivost dat.
Závěr
Uzávěrka ve vědeckém zobrazování je v podstatě otázkou řízení časování, spíše než jednoduchého nastavení expozice. Rozdíly mezi režimy rolovací závěrky, globální závěrky a globálního resetu vyplývají z toho, jak je expozice aplikována na snímač v čase, a tyto rozdíly přímo ovlivňují zkreslení, synchronizaci a spolehlivost měření. Žádná strategie uzávěrky není univerzálně optimální; správná volba závisí na dynamice scény, řízení osvětlení a požadavcích na časování na úrovni systému. Pochopením toho, jak uzávěrka interaguje se spouštěním a synchronizací, lze zobrazovací systémy navrhnout tak, aby efektivněji vyvažovaly výkon, složitost a integritu dat.
Pokud vyhodnocujete strategie clonění pro konkrétní vědeckou zobrazovací aplikaci, může vám diskuse o časových požadavcích a synchronizačních omezeních na systémové úrovni pomoci objasnit nejvhodnější přístup.TucsénPravidelně podporujeme výzkumníky a systémové integrátory při posuzování chování clonění v reálných zobrazovacích systémech.
Tucsen Photonics Co., Ltd. Všechna práva vyhrazena. Při citaci prosím uveďte zdroj:www.tucsen.com








