
 30-04-2026
30-04-2026Hardwaretriggering in een wetenschappelijke camera betekent dat externe elektrische signalen worden gebruikt om te bepalen wanneer beeldacquisitie plaatsvindt, in plaats van alleen te vertrouwen op de interne timing van de camera of softwarecommando's. In de praktijk wordt dit toegepast wanneer de camera uitgelijnd moet blijven met iets anders in het systeem, zoals een lichtbron, een laser, een podium of een ander apparaat.
In dit artikel leggen we uit wat hardwaretriggering inhoudt, hoe triggerinterfaces hierin passen, welke triggersignalen camera's doorgaans gebruiken en wanneer deze functie daadwerkelijk van belang is in wetenschappelijke beeldvormingsworkflows. Dit is belangrijk omdat in veel wetenschappelijke beeldvormingssystemen beeldkwaliteit alleen niet voldoende is als de camera niet synchroon kan blijven met de timing van de rest van de opstelling.
Wat is hardwarematige triggering in een wetenschappelijke camera?
Hardwaretriggering is een methode om de timing van een camera te regelen met externe signalen. In plaats van de camera alleen op zijn eigen interne klok te laten werken, geeft een extern signaal de camera het signaal om te reageren. Dat signaal is meestal digitaal, wat betekent dat het schakelt tussen een lage en een hoge spanning om binaire informatie over te brengen. Dit is de meest voorkomende vorm van triggering in wetenschappelijke beeldvormingssystemen, omdat het eenvoudig, snel en zeer geschikt is voor synchronisatie tussen verschillende hardwarecomponenten.
Om hardwaretriggering goed te begrijpen, is het nuttig om het signaal, de interface en het cameragedrag van elkaar te scheiden. Het triggersignaal is de elektrische gebeurtenis zelf. In veel systemen is de belangrijkste gebeurtenis het moment waarop het signaal van toestand verandert, wat een flank wordt genoemd. Een stijgende flank treedt op wanneer het signaal van laag naar hoog verandert, terwijl een dalende flank het omgekeerde is. In andere gevallen is niet alleen het moment van verandering belangrijk, maar ook hoe lang het signaal hoog of laag blijft. Dat noemen we het niveau van het signaal. Dit verschil is belangrijk omdat sommige camerafuncties reageren op een flank, terwijl andere afhankelijk zijn van de duur van het niveau.
De triggerinterface is daarentegen simpelweg de fysieke verbinding die het signaal naar de camera transporteert of eruit leidt. Met andere woorden, de interface laat zien hoe het signaal is verbonden, terwijl hardwaretriggering aangeeft hoe de camera dat signaal gebruikt om de timing te regelen. Dit onderscheid is belangrijk, omdat gebruikers vaak eerst "Triggerinterface" op een specificatieblad zien staan, maar wat ze echt moeten weten is hoe de camera zich gedraagt zodra er een trigger binnenkomt. In een wetenschappelijke beeldvormingsopstelling is hardwaretriggering waardevol omdat het beeldacquisitie transformeert van een geïsoleerde camera-actie naar een gecoördineerde systeemgebeurtenis.
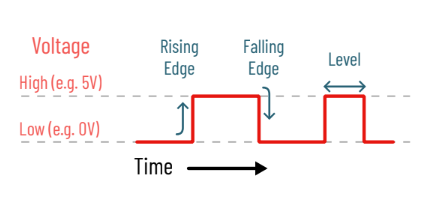
Afbeelding 1:Illustratie van terminologie die aanleiding kan geven tot discussie.
Hardwaretrigger versus softwaretrigger: wat is het verschil?
Het belangrijkste verschil zit hem in de herkomst van het timingsignaal en de voorspelbaarheid ervan. Bij een hardwaregestuurde opstelling reageert de camera op een extern elektrisch signaal. Bij een softwaregestuurde opstelling komt het timingcommando via de computer en de softwareomgeving. Dit verschil heeft invloed op de stabiliteit en reproduceerbaarheid van de timing in de praktijk.
| Aspect | Hardware-trigger | Softwaretrigger |
| Tijdbron | Extern apparaat of elektrisch signaal | Softwareopdracht van de computer |
| Timingconsistentie | Voorspelbaarder | Meer beïnvloed door software en systeemtiming. |
| Het beste voor | Nauwe synchronisatie tussen apparaten | Algemene beeldvorming met minder strikte tijdsvereisten |
| Typische gebruiksscenario's | Gesynchroniseerde belichting, podiumgebaseerde opname, herhaalde snelle workflows | Routinematige vastlegging, eenvoudige sequentiecontrole, minder tijdgevoelige taken |
| Installatiecomplexiteit | Meestal hoger | Meestal eenvoudiger |
Softwaretriggering is nog steeds nuttig bij veel beeldverwerkingstaken, vooral wanneer strikte synchronisatie niet vereist is. Het is vaak eenvoudiger te configureren en kan volledig toereikend zijn voor routinematige opnames. Hardwaretriggering wordt waardevoller wanneer timingstabiliteit direct van invloed is op het resultaat, bijvoorbeeld wanneer een lichtbron alleen tijdens de belichting mag afgaan of wanneer een camera pas mag vastleggen nadat een statief de juiste positie heeft bereikt.
Wat doen Trigger In en Trigger Out nu precies?
Met Trigger In kan een extern apparaat bepalen wanneer de camera reageert, terwijl Trigger Out de camera in staat stelt timinginformatie naar andere apparaten te sturen.
In praktische termen,Activeren inDeze functie wordt gebruikt wanneer iets buiten de camera moet bepalen wanneer er een opname plaatsvindt. Afhankelijk van de camera kan dat betekenen dat elk frame begint met een binnenkomende puls, dat de duur van een niveausignaal wordt gebruikt om de belichtingstijd te bepalen, of dat het begin van een frameserie wordt uitgesteld totdat een extern signaal arriveert. Daarom is Trigger In gebruikelijk in systemen waar beeldacquisitie moet volgen op een gebeurtenis, en niet alleen op een software-instructie. Een positioneringssysteem kan bijvoorbeeld stoppen met bewegen en vervolgens een trigger versturen, zodat de camera alleen een opname maakt wanneer het monster zich in de juiste positie bevindt. In een andere opstelling kan een experimentele gebeurtenis of sensorsignaal de camera precies vertellen wanneer het volgende frame moet worden opgenomen.
UitschakelenHet werkt in de tegenovergestelde richting. Hier vertelt de camera andere hardware over zijn huidige status. Die output kan gebeurtenissen aangeven zoals belichting, uitlezing of of de camera klaar is voor het volgende beeld. In een echt systeem maakt dat het mogelijk voor de camera om de timing van een lichtbron of een ander randapparaat te regelen. Een lichtbron kan bijvoorbeeld alleen tijdens de belichtingsperiode worden aangestuurd, of een ander apparaat kan wachten tot de uitlezing is voltooid voordat het zijn volgende actie uitvoert. Verschillende camera's kunnen verschillende Trigger Out-signalen afgeven, maar het kernidee is hetzelfde: de camera deelt de timingstatus met de rest van het systeem.
Welke triggerinterfaces gebruiken wetenschappelijke camera's?
Een triggerinterface is de fysieke verbinding die wordt gebruikt om triggersignalen tussen de camera en externe hardware over te brengen. Daarom wordt de triggerinterface in de specificaties van camera's vaak als een apart onderdeel vermeld. Het beschrijft hoe triggersignalen fysiek worden verbonden, niet hoe de camera zich gedraagt zodra die signalen aankomen.
SMA-interfaces
SMASMA (afkorting voor SubMiniature version A) is een standaard triggerinterface gebaseerd op een platte coaxkabel, die veelvuldig wordt gebruikt in beeldverwerkingsapparatuur. In de praktijk is SMA daarom een goede keuze voor gebruikers die een duidelijke en eenvoudige manier willen om triggersignalen tussen de camera en een ander apparaat te verbinden.

Figuur 2: SMA-interface in deDhyana 95V2 sCMOS-camera
Hirose-interfaces
Hirose is een interface met meerdere pinnen die meerdere in- en uitgangssignalen via één enkele verbinding met de camera levert. In plaats van aparte, eenvoudige verbindingen te gebruiken, kan een Hirose-interface meerdere in- en uitgangssignalen via één connector met meerdere pinnen doorgeven. Dit maakt de interface nuttig in systemen waar een schoner en compacter I/O-ontwerp de voorkeur heeft, met name wanneer meerdere triggergerelateerde functies tegelijkertijd moeten worden afgehandeld.

Figuur 3: Hirose-interface in deFL 20BW CMOS-camera
CC1 en andere gespecialiseerde interfaces
Sommige camera's gebruiken CC1 of andere gespecialiseerde triggeraansluitingen, met name in systemen die gekoppeld zijn aan specifieke data-interfaces of camera-architecturen. CC1 is een gespecialiseerde hardwarematige triggerinterface op de PCI-E CameraLink-kaart die door sommige camera's met CameraLink-data-interfaces wordt gebruikt. Het type interface kan variëren afhankelijk van het cameraontwerp, de signaalconfiguratie en de bredere hardwareomgeving. Wanneer u 'Triggerinterface' in een specificatieblad ziet staan, moet u dit dus interpreteren als onderdeel van het fysieke integratieontwerp van de camera, en niet als de volledige beschrijving van de triggerfunctionaliteit.

Figuur 4: CC1-interface in deDhyana 4040 sCMOS-camera
Wanneer heb je daadwerkelijk hardwarematige triggering nodig?
Hardwaretriggering is meestal nodig wanneer de beeldacquisitie synchroon moet lopen met een ander apparaat, een gebeurtenis of een timingvenster. Met andere woorden, hardwaretriggering wordt belangrijk wanneer de camera niet zelfstandig werkt, maar onderdeel uitmaakt van een gecoördineerd systeem. Hoe meer het resultaat afhangt van het moment waarop een foto wordt genomen, in plaats van simpelweg of er een foto wordt genomen, hoe groter de kans dat hardwaretriggering nuttig is.
Een veelvoorkomend voorbeeld is gesynchroniseerde belichting. Als een lichtbron alleen tijdens het belichtingsvenster van de camera moet inschakelen, zorgt hardwarematige triggering ervoor dat die timing nauwkeurig en herhaalbaar blijft. Dit kan onnodige belichting verminderen en het risico op een timingverschil tussen belichting en lichtopbrengst verlagen. Een vergelijkbare logica geldt voor lasersystemen, waar precieze controle over de timing van de belichting nog belangrijker kan zijn.
Een ander duidelijk voorbeeld zijn bewegingsplatformen en inspectieworkflows. Als een platform, portaal of ander bewegend onderdeel de juiste positie moet bereiken voordat de camera een beeld vastlegt, zorgt hardwaretriggering ervoor dat de camera reageert op de daadwerkelijke gebeurtenis in plaats van op een losjes getimede software-instructie. Dit maakt het bijzonder nuttig bij scannen, inspecteren en andere beeldverwerkingstaken waarbij beweging een rol speelt.
Het wordt ook waardevoller bij snelle, herhaalde opnames. Naarmate de timingcycli sneller en repetitiever worden, worden kleine vertragingen en variaties moeilijker te negeren. Een stabiele hardwarematige timingbron is vaak beter geschikt voor deze workflows dan besturing die uitsluitend via software verloopt. Ten slotte is hardwarematige triggering vaak de veiligere keuze bij de coördinatie van meerdere apparaten of camera's, waarbij camera's, lichtbronnen, stages, filterwielen of andere optische componenten allemaal dezelfde timinglogica moeten volgen.
Dat gezegd hebbende, is hardwaretriggering niet automatisch de hoogste prioriteit voor elke configuratie. Als uw workflow voornamelijk bestaat uit routinematige statische beeldverwerking en niet afhankelijk is van synchronisatie met externe hardware, kan het nuttig zijn, maar het is wellicht niet de eerste functie die u moet optimaliseren.
Welke timingproblemen kunnen er optreden bij een getriggerde configuratie?
Een getriggerde configuratie kan nog steeds mislukken als de fysieke verbinding correct is, maar de timinglogica verkeerd wordt begrepen. Dat is een belangrijk onderscheid. Een camera kan correct zijn aangesloten op een ander apparaat, maar als de trigger op het verkeerde moment aankomt, de verkeerde triggermodus gebruikt of naar het verkeerde statussignaal verwijst, kan het systeem zich nog steeds inconsistent of onbetrouwbaar gedragen. In veel gevallen ligt het probleem niet bij de kabel of de connector, maar bij een misverstand over wat de camera op dat moment moet doen.
Een veelgemaakte fout is het verwarren van de triggerinterface met de triggermodus. De interface geeft aan hoe het signaal fysiek is aangesloten, maar vertelt niet of de camera een frametrigger, een niveaugestuurde belichting of een getriggerde sequentie verwacht. Een ander veelvoorkomend probleem is de aanname dat een camera, zodra deze een triggersignaal heeft ontvangen, altijd direct de volgende trigger kan accepteren. In werkelijkheid kan een nieuwe trigger binnenkomen voordat het vorige frame volledig is opgenomen, wat kan leiden tot gemiste triggers of onverwacht timinggedrag. Daarom zijn de "gereed"-signalen van de camera zo belangrijk in systemen met een hoge mate van controle.
Het is ook gemakkelijk om je alleen te concentreren op de belichtingstijd en te vergeten dat de uitleestijd nog steeds belangrijk is. De camera kan een frame nog steeds uitlezen, zelfs nadat de belichting is voltooid. Bij camera's met een rolling shutter kan de timing nog verwarrender worden, omdat verschillende Trigger Out-signalen naar verschillende belichtingsgerelateerde gebeurtenissen kunnen verwijzen, zoals de belichting van een willekeurige rij, de eerste rij of een pseudo-globaal interval. Ten slotte gaan gebruikers er soms van uit dat een Trigger Out-signaal altijd hetzelfde betekent bij alle camera's, terwijl de output in feite belichting, uitlezing of gereedheid kan aangeven, afhankelijk van het systeem. Goed triggeren gaat niet alleen over het versturen van een puls. Het gaat erom precies te begrijpen welke gebeurtenis die puls vertegenwoordigt.
Conclusie
Hardware-triggering is het meest waardevol wanneer eenwetenschappelijke cameraHet moet functioneren als onderdeel van een getimed systeem, en niet als een op zichzelf staand beeldvormingsapparaat. De triggerinterface laat zien hoe signalen fysiek met elkaar verbonden zijn, maar de werkelijke waarde van hardwaretriggering schuilt in hoe goed de camera kan reageren op, informatie kan delen met en de timing kan coördineren met de rest van de opstelling.
Als je een camera evalueert voor gesynchroniseerde beeldvorming, is het de moeite waard om de triggerfunctionaliteit te beschouwen als onderdeel van de volledige workflow in plaats van als een losstaand specificatiepunt.TucsenDe juiste positionering en triggerondersteuning worden vooral belangrijk in toepassingen die afhankelijk zijn van een nauwkeurige coördinatie tussen de camera en andere hardware.
Veelgestelde vragen
Kan een camera in hetzelfde systeem zowel Trigger In als Trigger Out gebruiken?
Ja. Een camera kan een Trigger In-signaal van het ene apparaat ontvangen en een Trigger Out-signaal naar een ander apparaat verzenden. In de praktijk worden beide vaak samen gebruikt in hetzelfde gesynchroniseerde systeem.
Werkt hardwarematige triggering op dezelfde manier bij camera's met een rolling shutter en camera's met een global shutter?
Niet altijd. Het basisprincipe is hetzelfde, maar de timing en betekenis van triggersignalen kunnen verschillen, vooral bij camera's met een rolling shutter. Wanneer timing cruciaal is, moet je controleren wat elk triggersignaal precies betekent op dat specifieke model.
Wat moet ik naast de triggerinterface nog meer controleren op het specificatieblad van een camera?
Controleer of de camera Trigger In, Trigger Out en de triggermodi ondersteunt die uw workflow vereist. Het is ook handig om te controleren welke uitvoerstatussen de camera kan rapporteren, zoals belichting, uitlezing of gereedheidssignalen.
Tucsen Photonics Co., Ltd. Alle rechten voorbehouden. Vermeld bij citatie de bron:www.tucsen.com








