
 2025/09/18
2025/09/18I verden av bildebehandling, lyd og målesystemer er dynamisk område en av de mest grunnleggende spesifikasjonene du vil støte på. Det forteller oss hvor godt en enhet kan fange opp både de svakeste og de lyseste signalene uten å miste detaljer. Enten du jobber med et vitenskapelig kamera, en lydopptaker eller til og med en smarttelefon, bestemmer dynamisk område hvor mye informasjon som kan bevares.
I denne artikkelen skal vi utforske vitenskapen bak dynamisk område, forklare hvordan man beregner det, og avdekke hvorfor det er viktig i virkelige applikasjoner.
Hva er dynamisk område?
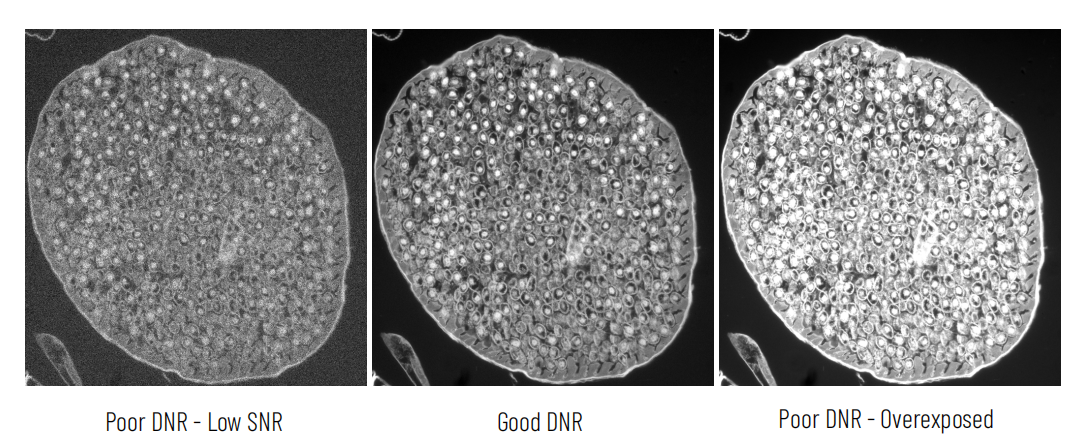
Figur 1Eksempler på dynamisk område
Dårlig dynamisk område kan enten føre til lavt signal-til-støy-forhold, utilstrekkelig målenøyaktighet eller til overeksponering og metning av bildepiksler.
Dynamisk rekkevidde refererer til et kameras evne til å fange opp lyse og mørke signaler samtidig, med presisjon.
Det finnes to måter å definere det på, som er matematisk likeverdige:
● Som et forhold mellom de lyseste og mørkeste detekterbare signalene.
● Som et mål på presisjon – det minste trinnet i signalintensitet som pålitelig kan skilles fra støy.
Enkelt sagt er dynamisk område (DR) forholdet mellom det største signalet et system kan måle og det minste signalet det kan oppdage over støygulvet.
● Ved avbildning (f.eks. et CMOS-kamera) kan dette være forskjellen mellom det svakeste detekterbare fotonet og den lyseste pikselen før metning.
● I lyd er det gapet mellom den stilleste lyden som hever seg over bakgrunnsstøy og den høyeste lyden før forvrengning.
AnalogiTenk på det menneskelige øyet. Vi kan tilpasse oss en månelys natt og også tolerere sterkt dagslys, men ikke begge deler samtidig. Kameraer og sensorer står overfor en lignende utfordring: deres evne til å gjengi detaljer avhenger i stor grad av deres dynamiske rekkevidde.
Vitenskapen bak dynamisk rekkevidde
Dynamisk rekkevidde er fundamentalt knyttet til signal-til-støy-forholdet (SNR). Høyere SNR betyr at systemet kan skille mellom små signaler uten å bli overveldet av bakgrunnsstøy.
Flere vitenskapelige prinsipper former dynamisk rekkevidde:
1.Støygulv– Alle systemer har iboende elektronisk støy. Dette setter den nedre deteksjonsgrensen.
2.Metningspunkt– Sensorer og forsterkere har et maksimalt nivå før signaler klippes eller forvrenges.
3.Bitdybde og kvantisering– I digitale systemer digitaliseres analoge signaler. Begrenset bitdybde introduserer kvantiseringsstøy, som begrenser DR.
4.Fysiske begrensninger– Sensormateriale, produksjonspresisjon og kretsdesign setter alle grenser for hvor bredt et dynamisk område realistisk sett kan være.
For eksempel, i ensCMOS-kamera, er støygulvet ekstremt lavt sammenlignet med eldre CCD-design, noe som gjør det mulig å fange opp både svake signaler og sterk belysning i samme bilde.
Slik beregner du dynamisk rekkevidde
1.Den generelle formelen
Som en proxy spesifiserer kameraprodusenter dynamisk område som pikslenes fulle brønnkapasitet, delt på lesestøyen.

NoteRapporterte verdier varierer avhengig av kameramodus og forsterkningsinnstilling. Kameraspesifikasjonsark vil vanligvis rapportere minst verdien for modusen med det høyeste dynamiske området. «Sant» maksimalt dynamisk område er lavere og inkluderer å unngå metning av de lyseste pikslene, og et minimumssignal som gir et nyttig signal-støy-forhold (SNR) til den tiltenkte målingen. Disse hensynene er spesifikke for individuelle brukstilfeller, så definisjonen ovenfor er nyttig for sammenligninger mellom kameraer.
2.Dynamisk område og bitdybde
Dynamisk område og bitdybde forveksles ofte med hverandre – faktisk er det vanlig å ha et dynamisk område som er mye lavere enn bitdybden, spesielt når det gjelder 16-bits kameraer. Dette betyr at selv om 65 536 forskjellige intensitetsutganger er mulige, kan ikke kameraet meningsfullt skille mellom disse mange intensitetsverdiene med statistisk signifikans.
Det dynamiske området kan imidlertid ikke være høyere enn bitdybden: for eksempel kan ikke et 12-bits kamera som kan levere 4096 forskjellige intensitetsverdier skille mellom mer enn 4096 forskjellige intensiteter.
3.Praktiske eksempler
●I bildebehandling (CMOS-sensor)Hvis det lyseste signalet er 100 000 elektroner per piksel og støygulvet er 5 elektroner, er det dynamiske området 20 000:1, eller ~86 dB.
●I lyd (mikrofon)En mikrofon som oppdager fra 20 μPa (hørselsterskel) opptil 20 Pa (smerteterskel) har en DR på 1 000 000:1, eller omtrent 120 dB.
Forhold, dB og bits: Ulike måter å uttrykke DR på
DNR omtales som et enkelt forhold. Imidlertid gis det samme forholdet vanligvis logaritmisk i enheter av desibel (dB), eller som en «effektiv» bitdybde.
Konvertering til og fra desibel
Et forholdstall beskrevet i desibel kan konverteres til et rent tall ved hjelp av følgende ligning:
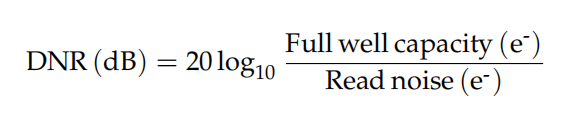
Omvendt kan et forholdstall konverteres til enheter av dB som følger:
Konvertering til effektiv bitdybde
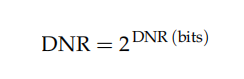
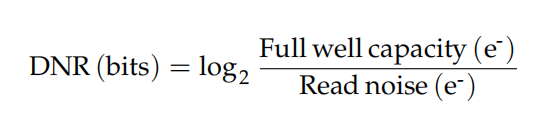
Fordi DNR, som nevnt, ikke kan være høyere enn bitdybden, uttrykkes den av og til i biter. Spesielt når det gjelder kameraer med høyt dynamisk område som annonserer et «ekte 16-biters» dynamisk område, noe som betyr at denne verdien er 16 biter eller høyere. Følgende formel konverterer et forhold til enheter av «biter»:
Og tilbake:
Hvorfor dynamisk rekkevidde er viktig
Dynamisk område er ikke bare et tall – det påvirker direkte brukervennlighet og resultater i virkelige applikasjoner.
●Vitenskapelige kameraerEt høyt dynamisk område tillater deteksjon av svake signaler i mikroskopi med lavt lys, samtidig som det forhindrer at lyse områder mettes. For eksempel tilbyr sCMOS-kameraer DR > 90 dB, noe som muliggjør samtidig avbildning av svake og lyse trekk.
●LydsystemerHøy DR sikrer at både stille bakgrunnsdetaljer og høye topper fanges opp uten forvrengning.
●Fotografi og forbrukerelektronikkDynamisk omfang ligger til grunn for HDR-bilder (høyt dynamisk område), som blander flere eksponeringer for å overvinne begrensninger i kamerasensoren.
Uten tilstrekkelig DR risikerer du tapte detaljer: skygger som falmer til svart eller høylys som blåses ut til rent hvitt.
Tolkning av dynamiske områdeverdier
Så, hva teller som et «godt» dynamisk område? Det avhenger av konteksten:
● Profesjonell lyd>100 dB er utmerket.
● Forbrukerkameraer~60–70 dB er typisk.
● Vitenskapelige CMOS-kameraerOverstiger ofte 80–90 dB, nødvendig for forskning.
Viktig informasjon:
Et høyere tall betyr ikke alltid «bedre».CMOS-kameramed svært høy DR, men dårlig følsomhet, kan fortsatt underprestere i applikasjoner med lite lys. Tolk alltid DR sammen med kvanteeffektivitet, lesestøy og bildefrekvens.
Vanlige misoppfatninger om dynamisk rekkevidde
1.Dynamisk område ≠ Oppløsning
Oppløsning handler om romlige detaljer (piksler), mens DR handler om lysstyrkedetaljer. De er uavhengige målinger.
2.Høyere dynamisk område er alltid bedre
Ikke sant. I noen tilfeller bytter et system DR mot hastighet eller følsomhet. Det «beste» avhenger av applikasjonen.
3.Produsentens spesifikasjoner er alltid sammenlignbare
Ulike selskaper kan bruke ulike målemetoder. Sjekk alltid om DR er spesifisert med full oppløsning, full bildefrekvens eller under spesifikke forhold.
Konklusjon
Dynamisk omfang er broen mellom vitenskap og anvendelse – et enkelt forhold som viser hvor mye informasjon en enhet kan fange opp mellom ytterpunktene mørkt og lyst, stille og høyt.
Å vite hvordan man beregner dynamisk område, forstå hvordan det uttrykkes og tolke det i kontekst, lar ingeniører, forskere og utviklere ta informerte valg.
Tilvitenskapelige kameraerSpesielt bør dynamisk rekkevidde evalueres sammen med kvanteeffektivitet, bitdybde og støyytelse. Ved å gjøre dette sikrer du at systemet ditt ikke bare er kapabelt på papiret, men optimalisert for resultater i den virkelige verden.
Vil du vite mer? Ta en titt på relaterte artikler:
[Dynamisk område] – Hva er dynamisk område?
Signal-til-støy-forhold i vitenskapelige kameraer: Hvorfor det er kritisk
Bitdybde i vitenskapelige kameraer: Hvordan det påvirker bildekvalitet og datanøyaktighet
Tucsen Photonics Co., Ltd. Alle rettigheter forbeholdt. Vennligst oppgi kilden ved sitering:www.tucsen.com








