
 2026/04/30
2026/04/30Hårdvarutriggning i en vetenskaplig kamera innebär att man använder externa elektriska signaler för att styra när bildtagning sker, istället för att bara förlita sig på kamerans interna timing eller programvarukommandon. I praktiken, när kameran måste vara i linje med något annat i systemet, såsom en ljuskälla, en laser, en scen eller en annan enhet.
I den här artikeln kommer vi att förklara vad hårdvarutlösning innebär, hur utlösningsgränssnitt passar in i det, vilka utlösningssignaler kameror vanligtvis använder och när den här funktionen faktiskt är viktig i verkliga vetenskapliga bildflöden. Detta är viktigt eftersom bildkvaliteten ensam i många vetenskapliga bildsystem inte räcker till om kameran inte kan hålla sig i linje med tidpunkten för resten av installationen.
Vad utlöser hårdvaruutlösning i en vetenskaplig kamera?
Hårdvarutriggning är en metod för att styra kameratiming med externa signaler. Istället för att låta kameran köras enbart på sin egen interna klocka, talar en extern signal om för kameran när den ska reagera. Den signalen är vanligtvis digital, vilket innebär att den växlar mellan ett lågt och ett högt spänningstillstånd för att bära binär information. Detta är den vanligaste formen av utriggning i vetenskapliga avbildningssystem eftersom den är enkel, snabb och väl lämpad för synkronisering mellan olika hårdvaruenheter.
För att förstå hårdvarutlösning tydligt är det bra att separera signalen, gränssnittet och kamerans beteende. Utlösningssignalen är själva den elektriska händelsen. I många system är den viktigaste händelsen det ögonblick då signalen ändrar tillstånd, vilket kallas en flank. En stigande flank inträffar när signalen ändras från låg till hög, medan en fallande flank är det motsatta. I andra fall är den viktiga faktorn inte bara förändringsögonblicket, utan hur länge signalen förblir hög eller låg. Det kallas signalnivån. Denna skillnad är viktig eftersom vissa kamerafunktioner reagerar på en flank, medan andra är beroende av nivåns varaktighet.
Triggergränssnittet är däremot helt enkelt den fysiska anslutning som transporterar signalen in i eller ut ur kameran. Med andra ord berättar gränssnittet hur signalen är ansluten, medan hårdvarutlösning berättar hur kameran använder signalen för att styra timingen. Den skillnaden är viktig, eftersom användare ofta först lägger märke till "Trigger Interface" på ett specifikationsblad, men det de verkligen behöver veta är hur kameran beter sig när en trigger anländer. I en vetenskaplig bilduppsättning är hårdvarutlösning värdefull eftersom den omvandlar bildinsamling från en isolerad kameraåtgärd till en del av en koordinerad systemhändelse.
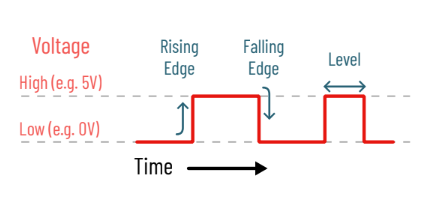
Figur 1:Illustration av utlösande terminologi
Hårdvarutriggare vs. mjukvarutriggare: Vad är skillnaden?
Den största skillnaden är varifrån tidssignalen kommer och hur förutsägbar den timingen är. I en hårdvarutriggad installation reagerar kameran på en extern elektrisk signal. I en mjukvarutriggad installation kommer tidskommandot istället via dator- och mjukvarumiljön. Den skillnaden påverkar hur stabil och repeterbar timingen kan vara i verkliga bildarbetsflöden.
| Aspekt | Hårdvarutlösare | Programvarutlösare |
| Tidskälla | Extern enhet eller elektrisk signal | Programkommando från datorn |
| Timingkonsekvens | Mer förutsägbar | Mer påverkad av programvara och systemtiming |
| Bäst för | Noggrann synkronisering mellan enheter | Allmän avbildning med mindre strikta tidskrav |
| Typiska användningsfall | Synkroniserad belysning, scenbaserad förvärvning, upprepade höghastighetsarbetsflöden | Rutinmässig insamling, grundläggande sekvenskontroll, mindre tidskritiska uppgifter |
| Komplexitet i installationen | Vanligtvis högre | Vanligtvis enklare |
Programvarutlösning är fortfarande användbar vid många bildtagningsuppgifter, särskilt när strikt synkronisering inte krävs. Det är ofta enklare att konfigurera och kan vara fullt tillräckligt för rutinmässig bildtagning. Hårdvarutlösning blir mer värdefull när tidsstabilitet direkt påverkar resultatet, till exempel när en ljuskälla endast måste utlösas under exponering eller när en kamera bara ska ta bilder efter att ett bord når sin position.
Vad gör egentligen Trigger In och Trigger Out?
Trigger In låter en extern enhet styra när kameran reagerar, medan Trigger Out låter kameran skicka tidsinformation till andra enheter.
I praktiken,Trigger Inanvänds när något utanför kameran ska avgöra när avbildning sker. Beroende på kameran kan det innebära att starta varje bildruta med en inkommande puls, använda varaktigheten på en nivåsignal för att definiera exponeringstid, eller fördröja starten av en bildrutesekvens tills en extern signal anländer. Det är därför Trigger In är vanligt i system där bildtagning måste följa en händelse, inte bara en programvaruinstruktion. Till exempel kan en scen sluta röra sig och sedan skicka en trigger så att kameran bara tar bilder när provet är på plats. I en annan uppställning kan en experimenthändelse eller sensorsignal berätta för kameran exakt när nästa bildruta ska tas.
Trigger Outfungerar i motsatt riktning. Här informerar kameran annan hårdvara om sitt aktuella tillstånd. Den utdata kan indikera händelser som exponering, avläsning eller om kameran är redo för nästa bildruta. I ett verkligt system gör det det möjligt för kameran att styra timing för en ljuskälla eller annan kringutrustning. Till exempel kan en ljuskälla endast drivas under exponeringsperioden, eller så kan en annan enhet vänta tills avläsningen är klar innan den vidtar nästa åtgärd. Olika kameror kan erbjuda olika Trigger Out-signaler, men kärnidén är densamma: kameran delar timingstatus med resten av systemet.
Vilka triggergränssnitt använder vetenskapliga kameror?
Ett triggergränssnitt är den fysiska anslutning som används för att överföra triggersignaler mellan kameran och extern hårdvara. Det är därför kameraspecifikationer ofta listar triggergränssnittet som en separat punkt. Det anger hur triggersignaler är fysiskt anslutna, inte hur kameran kommer att bete sig när dessa signaler anländer.
SMA-gränssnitt
SMA(förkortning för SubMiniature version A) är ett standardutlösningsgränssnitt baserat på en lågprofilskoaxialkabel, mycket vanligt förekommande i bildbehandlingshårdvara. I praktiken gör detta SMA till ett bra alternativ för användare som vill ha ett tydligt och enkelt sätt att ansluta utlösningssignaler mellan kameran och en annan enhet.

Figur 2: SMA-gränssnitt iDhyana 95V2 sCMOS-kamera
Hirose-gränssnitt
Hirose är ett flerstiftsgränssnitt som tillhandahåller flera in- och utsignaler via en enda anslutning till kameran. Istället för att använda separata enkla anslutningar kan ett Hirose-gränssnitt överföra flera in- och utsignaler via en flerstiftskontakt. Det gör det användbart i system där en renare, mer kompakt I/O-design föredras, särskilt när flera triggerrelaterade funktioner behöver hanteras tillsammans.

Figur 3: Hirose-gränssnittet iFL 20BW CMOS-kamera
CC1 och andra specialiserade gränssnitt
Vissa kameror använder CC1 eller andra specialiserade triggeranslutningar, särskilt i system som är knutna till specifika datagränssnitt eller kameraarkitekturer. CC1 är ett specialiserat hårdvarutlösningsgränssnitt som finns på PCI-E CameraLink-kortet som används av vissa kameror med CameraLink-datagränssnitt. Gränssnittstypen kan variera beroende på kamerans design, signallayout och den bredare hårdvarumiljön. Så när du ser "Trigger Interface" i ett specifikationsblad bör du läsa det som en del av kamerans fysiska integrationsdesign, inte som hela historien om dess utlösningsförmåga.

Figur 4: CC1-gränssnittet iDhyana 4040 sCMOS-kamera
När behöver du faktiskt hårdvarutlösning?
Vanligtvis behöver du hårdvarutlösning när bildtagning måste vara i linje med en annan enhet, händelse eller tidsfönster. Med andra ord blir hårdvarutlösning viktig när kameran inte arbetar ensam, utan som en del av ett samordnat system. Ju mer resultatet beror på när en bild tas snarare än bara om en bild tas, desto mer sannolikt är det att hårdvarutlösning kommer att vara användbar.
Ett vanligt fall är synkroniserad belysning. Om en ljuskälla bara ska tändas under kamerans exponeringsfönster, hjälper hårdvarutlösning till att hålla den timing-funktionen ren och repeterbar. Detta kan minska onödig belysning och minska risken för tidsavvikelser mellan exponering och ljusutgång. Liknande logik gäller för laserbaserade system, där exakt kontroll över belysningstidpunkten kan vara ännu viktigare.
Ett annat tydligt exempel är rörelsestadier och inspektionsarbetsflöden. Om en plattform, gantry eller annan rörlig del behöver nå rätt position innan kameran tar en bildruta, hjälper hårdvarutlösning till att säkerställa att kameran reagerar på den faktiska händelsen istället för på en löst tidsbestämd programvaruinstruktion. Det gör den särskilt användbar vid skanning, inspektion och andra rörelselänkade avbildningsuppgifter.
Det blir också mer värdefullt vid upprepad höghastighetsinspelning. Allt eftersom tidscyklerna blir snabbare och mer repetitiva blir små fördröjningar och variationer svårare att ignorera. En stabil hårdvarubaserad tidskälla passar ofta bättre för dessa arbetsflöden än enbart mjukvarustyrning. Slutligen är hårdvarutlösning ofta det säkrare valet vid koordinering mellan flera enheter eller kameror, där kameror, ljuskällor, scener, filterhjul eller andra optiska komponenter alla måste följa samma tidslogik.
Med det sagt är hårdvarutlösning inte automatiskt högsta prioritet för varje installation. Om ditt arbetsflöde mestadels består av rutinmässig statisk avbildning och inte är beroende av synkronisering med extern hårdvara kan det vara bra att ha det, men det kanske inte är den första funktionen du behöver optimera.
Vilka tidsproblem kan uppstå i en triggad uppställning?
En utlöst installation kan fortfarande misslyckas om den fysiska anslutningen är korrekt men tidslogiken missförstås. Det är en viktig skillnad. En kamera kan vara korrekt ansluten till en annan enhet, men om utlösaren kommer vid fel tidpunkt, använder fel utlösarläge eller hänvisar till fel statussignal, kan systemet fortfarande bete sig på sätt som ser inkonsekvent eller opålitligt ut. I många fall är det verkliga problemet inte kabeln eller kontakten. Det är en missförståelse av vad kameran är redo att göra vid den tidpunkten.
Ett vanligt misstag är att blanda ihop triggergränssnitt och triggerläge. Gränssnittet visar hur signalen är fysiskt ansluten, men det berättar inte om kameran förväntar sig en bildruteutlösare, en nivåkontrollerad exponering eller en utlöst sekvens. Ett annat vanligt problem är att anta att när en kamera väl har Trigger In kan den alltid acceptera nästa trigger omedelbart. I verkligheten kan en ny trigger anlända innan föregående bildruta är helt klar, vilket kan leda till missade triggers eller oväntat timingbeteende. Det är därför kamerans "klar"-signaler kan vara viktiga i mer noggrant kontrollerade system.
Det är också lätt att bara fokusera på exponeringstiden och glömma att avläsningstiden fortfarande spelar roll. Kameran kan fortfarande läsa ut en bildruta även efter att exponeringen är avslutad. På rullande slutarkameror kan timingen bli ännu mer förvirrande eftersom olika Trigger Out-signaler kan referera till olika exponeringsrelaterade händelser, såsom exponering av valfri rad, den första raden eller ett pseudo-globalt intervall. Slutligen antar användare ibland att en Trigger Out-signal alltid betyder samma sak mellan kameror, när utsignalen i själva verket kan indikera exponering, avläsning eller beredskap beroende på systemet. Bra triggning handlar inte bara om att skicka en puls. Det handlar om att förstå exakt vilken händelse den pulsen representerar.
Slutsats
Hårdvarutriggning är mest värdefullt när envetenskaplig kameramåste fungera som en del av ett tidsstyrt system snarare än som en fristående bildenhet. Triggergränssnittet visar hur signalerna är fysiskt anslutna, men det verkliga värdet av hårdvarutlösning ligger i hur väl kameran kan reagera på, dela och koordinera timing över resten av installationen.
Om du utvärderar en kamera för synkroniserad bildbehandling är det värt att titta på triggerfunktionen som en del av hela arbetsflödet snarare än som en isolerad specifikationspost.Tucsenuppställning, triggerstöd blir särskilt viktigt i applikationer som är beroende av exakt samordning mellan kameran och annan hårdvara.
Vanliga frågor
Kan en kamera använda både Trigger In och Trigger Out i samma system?
Ja. En kamera kan ta emot en Trigger In-signal från en enhet och skicka en Trigger Out-signal till en annan. I praktiken används båda ofta tillsammans i samma synkroniserade system.
Fungerar hårdvaruutlösning på samma sätt på kameror med rullande slutare och global slutare?
Inte alltid. Grundidén är densamma, men tidsbetydelsen hos triggersignaler kan skilja sig åt, särskilt på rullande slutarkameror. När timingen är avgörande måste du bekräfta vad varje triggersignal faktiskt representerar på den modellen.
Vad bör jag kontrollera förutom Trigger Interface på ett kameraspecifikationsblad?
Kontrollera om kameran stöder Trigger In, Trigger Out och de triggerlägen som ditt arbetsflöde behöver. Det är också bra att bekräfta vilka utdatalägen kameran kan rapportera, till exempel exponering, avläsning eller redosignaler.
Tucsen Photonics Co., Ltd. Med ensamrätt. Vänligen ange källan vid citering:www.tucsen.com








