
 2026/03/09
2026/03/09O kvalitě obrazu se často hovoří, jako by se jednalo o jednu specifikaci – vyšší rozlišení, nižší šum nebo větší dynamický rozsah. Ve vědeckém zobrazování však kvalita obrazu není definována žádným jedním parametrem. Je výsledkem toho, jak signál, šum, dynamický rozsah, prostorové vzorkování a uniformita interagují za specifických provozních podmínek.
Kamera, která produkuje vizuálně příjemné snímky, může v kvantitativních pracovních postupech selhat, pokud se uniformita pozadí mění nebo je detekovatelnost omezena nízkým signálem. Naopak systém optimalizovaný pro vysokou citlivost může obětovat dynamický rozsah nebo prostorovou přesnost.
Pochopení toho, co skutečně určuje kvalitu obrazu, vyžaduje systémový pohled. Tato příručka rozebírá fyzikální faktory, které ovlivňují kvalitu obrazu ve vědeckých CMOS kamerách, a vysvětluje, jak je vyhodnotit na základě vaší aplikace.
Kvalita obrazu závisí na úloze
Kvalitu obrazu nelze definovat nezávisle na zobrazovacím úkolu. Stejná kamera může být v jedné aplikaci považována za vynikající a v jiné za nedostatečnou, v závislosti na úrovni signálu, cílech měření a přijatelných tolerancích chyb. Kvalita obrazu proto není absolutní specifikací – je určena tím, jak systém funguje za specifických provozních podmínek.
Spotřebitelské zobrazování vs. vědecké zobrazování
Ve spotřebitelské fotografii jsou scény obvykle dobře osvětlené a vizuálně řízené. Za takových podmínek dominuje vnímané kvalitě výkon objektivu, prostorové rozlišení a podání barev. Drobné artefakty z pevného vzoru nebo malé odchylky odsazení jsou obvykle maskovány silnými úrovněmi signálu a vizuálním kontrastem.
Vědecké zobrazování pracuje s jinými omezeními. V prostředí se slabým osvětlením – jako je fluorescenční mikroskopie, astronomie nebo experimenty s omezeným počtem fotonů – se signál může přiblížit pouze několika elektronům na pixel. V těchto režimech se mohou stát viditelné jemné zdroje šumu, variace ofsetu, horké pixely, záře nebo strukturované artefakty, které ovlivňují spolehlivost měření. Kamera se již neposuzuje pouze podle vizuální přitažlivosti, ale podle její schopnosti zachovat integritu signálu.
Kdy se omezení kvality obrazu stávají významnými?
Různé aplikace se potýkají s různými problémy s kvalitou obrazu. Inspekce s vysokým dynamickým rozsahem může upřednostňovat linearitu a uniformitu. Detekce slabého osvětlení může upřednostňovat šum při čtení a stabilitu ve tmě. Kvantitativní zobrazování může vyžadovat jak přesnost, tak opakovatelnost v průběhu času.
Praktická aproximace, která platí napříč aplikacemi, je tato: omezení kvality obrazu se stávají významnými, když jsou systematické artefakty nebo nerovnoměrnosti srovnatelné s vlastním šumem signálu nebo větší. Pokud tyto efekty zůstávají hluboko pod hranicí šumu, jejich praktický dopad je minimální.
Stručně řečeno, kvalita obrazu je definována provozním režimem a přesností požadovanou aplikací – nikoli jednou hlavní specifikací.
Signál a šum – základ kvality obrazu
V jádru je kvalita obrazu ve vědeckém zobrazování určena vztahem mezi signálem a šumem. Bez ohledu na to, jak pokročilý může být senzor, schopnost extrahovat smysluplné informace závisí na tom, jak jasně signál převyšuje základní úroveň šumu.
Úroveň signálu a fotoelektrony
In sCMOS kamery, tvorba obrazu začíná fotony generujícími fotoelektrony v každém pixelu. Počet shromážděných elektronů definuje skutečný fyzikální signál. Digitální hodnoty šedé (ADU) jsou jednoduše reprezentací tohoto náboje po zesílení a digitalizaci. Protože nastavení zesílení může změnit mapování mezi elektrony a úrovněmi šedé, samotný vizuální jas nedefinuje kvalitu obrazu – ano, ano, základní počet elektronů.
Záleží na režimu signálu. Při vysokých úrovních signálu dominuje šum fotonů. Při nízkých úrovních signálu se stávají významnějšími zdroje elektronického šumu – jako je šum při čtení a efekty související s tmou.
Zdroje šumu ve vědeckých CMOS kamerách
K degradaci obrazu přispívá několik složek šumu:
● Šum fotonového výstřelu, který se škáluje s druhou odmocninou signálu
● Šum při čtení, vznikající během převodu náboje na napětí a digitalizace
● Varianty související s tmou, včetněDSNU(variace ofsetu)
● Variace související se ziskem, jako napříkladPRNU
Každý zdroj se chová odlišně v závislosti na úrovni signálu. Některé se mění s jasem, jiné zůstávají pevné. Pochopení toho, která složka dominuje za daných provozních podmínek, je nezbytné pro realistické vyhodnocení kvality obrazu.
Poměr signálu k šumu (SNR) jako primární metrika
Poměr signálu k šumu (SNR) poskytuje jednotný způsob posouzení kvality obrazu. Spíše než zaměření na jednotlivé specifikace SNR vyhodnocuje, zda je sledovaný signál odlišitelný od celkového šumu.
Za podmínek silného osvětlení je poměr signálu k šumu (SNR) často omezen statistikou fotonů. Za podmínek slabého osvětlení může být SNR omezen šumem při čtení nebo nerovnoměrnostmi souvisejícími s tmou. Zlepšení kvality obrazu proto není jen o snížení jedné specifikace – vyžaduje identifikaci, který zdroj šumu omezuje výkon v zamýšleném signálovém režimu.
Kvalita obrazu se nakonec zlepšuje, když se signál zvyšuje v porovnání s dominantním zdrojem šumu. Identifikace tohoto dominantního zdroje je prvním krokem v optimalizaci na úrovni systému.
Dynamický rozsah a reprodukce kontrastu
Dynamický rozsah popisuje rozpětí mezi nejmenším detekovatelným signálem a největším signálem, který senzor dokáže zaznamenat před saturací. Definuje, kolik kontrastních variací dokáže zobrazovací systém zachytit v jedné expozici.
Plná kapacita vrtu a hladina hluku
Na horní hranici dynamického rozsahu se nachází senzorplná kapacita vrtu—maximální počet elektronů, které může pixel uložit před saturací. Na spodním konci se nacházíhluková podlaha, určené čtecím šumem a příspěvky souvisejícími s tmou.
Poměr mezi plnou kapacitou jamky a efektivní úrovní šumu definuje použitelný dynamický rozsah. Kamera s nízkým čtecím šumem, ale omezenou plnou kapacitou jamky, může vynikat v detekci slabého osvětlení, zatímco kamera s vysokou plnou kapacitou jamky může lépe zachytit scény obsahující současně jasné i tmavé prvky.
Kompromisy mezi vysokým a nízkým osvětlením
Optimalizace kamery pro extrémní citlivost často snižuje maximální kapacitu nabíjení nebo zvyšuje zisk, což může zkrátit použitelný dynamický rozsah. Naopak optimalizace pro velký dynamický rozsah může ohrozit detekovatelnost při nízkém signálu.
V důsledku toho musí být kvalita obrazu vyhodnocena vzhledem k očekávanému režimu signálu. Systém určený pro zobrazování v tlumeném fluorescenčním spektru upřednostňuje nízký šum. Systém určený pro kontrolu v jasném poli může upřednostňovat dynamický rozsah a linearitu.
Bitová hloubka se nerovná dynamickému rozsahu
Bitová hloubka definuje, jak jemně je analogový signál digitalizován, ale sama o sobě nevytváří dynamický rozsah. Pokud je analogová šumová podlaha vysoká, zvýšení bitové hloubky pouze přesněji rozděluje šum – nerozšiřuje detekovatelný rozsah signálu.
Skutečný dynamický rozsah je určen fyzikou senzoru a šumovými charakteristikami, nikoli pouze digitálním rozlišením.
Uniformita a artefakty s pevným vzorem
Kromě síly signálu a dynamického rozsahu je kvalita obrazu ovlivněna také prostorovou uniformitou. I při nízkých úrovních šumu mohou strukturované artefakty napříč senzorem ovlivnit konzistenci pozadí a kvantitativní spolehlivost.
Nejednotnost související s ofsetem a ziskem
In CMOS kamery, určité nerovnoměrnosti se jeví jako statické nebo opakovatelné vzory. Tyto artefakty se často označují jako šum s pevným vzorem (FPN), protože jejich prostorová struktura se nemění mezi snímky.
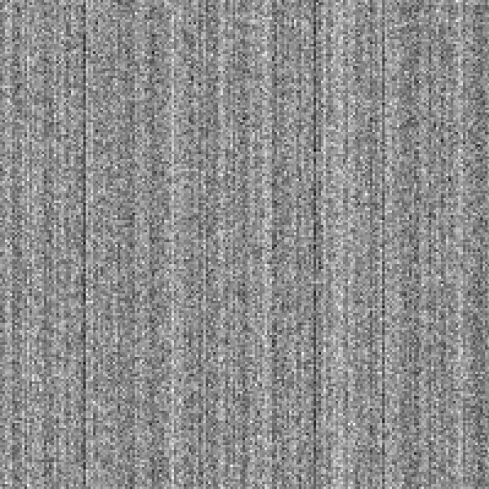
Obrázek 1: Šum sloupce s pevným vzorem
Rozdíly v hodnotě ofsetu analogově-digitálního převodníku CMOS mezi sloupci vedou k viditelnému vzoru světlých a tmavých sloupců, který se mezi po sobě jdoucími snímky nemění. Zde je vidět bez dopadajícího světla. Tento vzor může být významný ve srovnání s kontrastem snímaného objektu za slabého osvětlení a stává se viditelným na snímcích.
Jedním běžným zdrojem jsou odchylky odchylek související se sloupci. Mnoho architektur CMOS používá paralelní odečítání sloupců, kde je každý sloupec zpracováván specializovaným analogově-digitálním převodníkem (ADC). Malé rozdíly mezi odchylkami ADC mohou za slabého osvětlení nebo při slabém předpětí vytvářet viditelné vertikální pruhování. U konstrukcí s děleným senzorem se může objevit i horizontální rozdělení napříč snímkem.
Méně často se mohou vzory související s řádky vyskytovat, když jsou řádky čteny paralelně s mírnými neshodami ofsetů. I když tyto vzory mohou být nenápadné, lidský vizuální systém je obzvláště citlivý na strukturované opakování, takže jsou znatelnější než čistě náhodný šum.
Kdy strukturované artefakty ovlivňují kvalitu obrazu?
Fixní vzory související s ofsetem jsou nejviditelnější v režimech s nízkým signálem, kde podkladový signál nemaskuje prostorové variace. U starších nebo méně kvalitních systémů se takové artefakty mohou stát viditelnými i při středních úrovních signálu. V moderních, dobře kalibrovaných sCMOS kamerách jsou sloupcové a řádkové vzory obvykle sníženy na úrovně pod úrovní čtecího šumu, a proto nejsou za standardních zobrazovacích podmínek znatelné.
Strukturované artefakty se však mohou projevit více v pracovních postupech zahrnujících průměrování snímků, odečítání pozadí nebo automatizovanou analýzu. Protože jsou takové vzory systematické, nezprůměrují se jako náhodný šum.
Proč specifikace nemusí odhalovat strukturované vzory
Na rozdíl od DSNU, která statisticky kvantifikuje odchylku odsazení, strukturované vzory nejsou plně zachyceny jedinou hodnotou RMS. Specifikační listy zřídka obsahují reprezentativní snímky zkreslení při slabém osvětlení, což ztěžuje posouzení strukturovaných artefaktů pouze na základě čísel.
V aplikacích, kde je uniformita kritická, může být nezbytné empirické vyhodnocení – zejména za podmínek nízkého signálu nebo průměrování – k potvrzení, že prostorové artefakty neovlivňují analýzu.
Rozlišení není totéž co kvalita obrazu
Rozlišení je často mylně považováno za primární ukazatel kvality obrazu. Prostorové rozlišení sice definuje, jak jemně lze vzorkovat nebo rozlišit detaily, ale nezaručuje smysluplná nebo přesná data.
Vyšší počet pixelů nebo menší velikosti pixelů zvyšují hustotu vzorkování, ale nesnižují šum, nezlepšují dynamický rozsah ani nezvyšují uniformitu. Pokud je poměr signálu k šumu nízký, zvýšení rozlišení může jednoduše rozdělit šum na menší pixely, aniž by se zlepšila detekovatelnost. Při zobrazování za extrémně slabého osvětlení mohou větší pixely s vyšší kapacitou jamky a nižším šumem při čtení produkovat lepší celkovou kvalitu obrazu, i když je nominální rozlišení nižší.
Skutečné rozlišení systému závisí také na optice, zvětšení a podmínkách vzorkování – nejen na specifikacích senzoru. Zobrazovací systém je omezen svou nejslabší součástí.
Ve vědeckém zobrazování přispívá rozlišení ke kvalitě obrazu, ale pouze v rovnováze s úrovní šumu, dynamickým rozsahem a stabilitou. Více pixelů samo o sobě nezaručuje lepší data.
Dáváme to dohromady – Jak vyhodnotit kvalitu obrazu
Hodnocení kvality obrazu ve vědeckém zobrazování vyžaduje více než jen čtení jediné specifikace. Systematický přístup pomáhá identifikovat, které faktory jsou pro danou aplikaci skutečně důležité.
1. Definujte režim signálu.
Určete, zda váš systém pracuje v prostředí s omezeným počtem fotonů, omezeným čtecím šumem nebo s vysokým signálem. Dominantní zdroj šumu se mění s úrovní signálu, a stejně tak se mění i příslušná metrika výkonu.
2. Identifikujte limitující faktor.
Při nízkých úrovních signálu často dominuje šum při čtení a efekty související s tmou. Při vysokých úrovních signálu může být důležitější dynamický rozsah, linearita nebo uniformita. Zlepšení neomezující specifikace jen zřídka zlepší skutečnou kvalitu obrazu.
3. Vyhodnoťte prostorovou konzistenci.
Posuďte, zda jsou artefakty nebo nerovnoměrnosti fixního vzoru významné vzhledem k šumové hladině. Strukturované variace mohou ovlivnit kvantitativní pracovní postupy, i když se celkový šum jeví jako nízký.
4. Zvažte kontext systému.
Optika, stabilita osvětlení a kalibrační strategie ovlivňují konečnou kvalitu obrazu. Výkon snímače nelze hodnotit odděleně od zobrazovacího systému.
Kvalita obrazu v konečném důsledku není definována nejvyšší specifikací, ale tím, jak dobře systém zachovává smysluplný signál za reálných provozních podmínek.
Příklady aplikací
Priority kvality obrazu se v různých vědeckých a průmyslových aplikacích výrazně liší. Dominantní omezující faktory závisí na režimu signálu, cílech měření a toleranci systematické chyby.
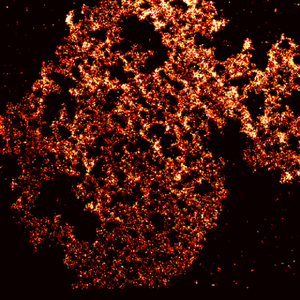
Fluorescenční mikroskopie
Ve fluorescenčním zobrazování – zejména vfluorescence jedné molekulyexperimenty – úrovně signálu se mohou blížit pouze několika elektronům na pixel. Kvalita obrazu je proto silně ovlivněna šumem při čtení, stabilitou ve tmě a uniformitou pozadí. Strukturované artefakty odsazení nebo horké pixely mohou rušit detekci slabého signálu a kvantitativní analýzu intenzity. V tomto režimu citlivost a nízký šum obvykle převažují nad extrémním dynamickým rozsahem.
Inspekční systémy často pracují se středními až vysokými úrovněmi signálu, ale vyžadují vynikající uniformitu a opakovatelnost. I nepatrné změny zesílení nebo ofsetu mohou ovlivnit prahové hodnoty detekce defektů nebo přesnost odečítání pozadí. V tomto případě jsou linearita, dynamický rozsah a prostorová konzistence často důležitější než hrubá citlivost.

Závěr
Kvalita obrazu ve vědeckém zobrazování není definována jedinou specifikací. Vyplývá z rovnováhy mezi úrovní signálu, zdroji šumu, dynamickým rozsahem, prostorovým rozlišením a uniformitou za reálných provozních podmínek. Stejná kamera se může chovat odlišně v závislosti na tom, zda je systém omezen fotony, dynamickým rozsahem nebo prostorovou konzistencí. Smysluplné vyhodnocení proto vyžaduje pochopení dominantního režimu šumu a přesnosti požadované aplikací.
At TucsénKvalita obrazu je řešena jako inženýrská výzva na úrovni systému – s ohledem na fyziku senzorů, kalibrační strategii a omezení specifická pro danou aplikaci. Pokud váš pracovní postup vyžaduje kvantitativní spolehlivost nebo extrémní citlivost, náš tým vám může pomoci s vyhodnocením výkonu v kontextu, na kterém skutečně záleží.
Tucsen Photonics Co., Ltd. Všechna práva vyhrazena. Při citaci prosím uveďte zdroj:www.tucsen.com








