
 2026/02/28
2026/02/28Dark Signal Non-Uniformity (DSNU) describes the pixel-to-pixel variation in a camera’s offset signal when no light is incident on the sensor. Even in complete darkness, image sensors produce a non-zero output—often referred to as a bias or dark signal—and this offset is not perfectly uniform across all pixels. DSNU quantifies how much these offsets differ spatially.
DSNU becomes most relevant in low-light imaging, where signal levels approach the near-read-noise regime and small offset differences can influence the effective noise floor. Unlike read noise, which is random and averages down over multiple frames, DSNU represents a fixed spatial variation that remains constant unless corrected.
Understanding DSNU is essential for interpreting low-light performance, comparing camera specifications, and ensuring quantitative accuracy in dark-limited applications.
What DSNU Really Measures (and What It Does Not)
To understand the impact of DSNU, it is essential to clarify exactly which part of the sensor signal it describes—and which noise mechanisms it does not represent.
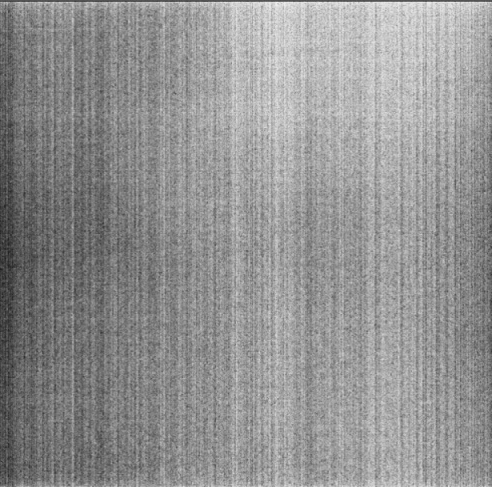
Figure 1: One of the most typical manifestations of DSNU, clearly showing the characteristics of pixel dark signal inhomogeneity.
DSNU = Pixel-Level Offset Variation
When a camera captures an image in complete darkness, each pixel produces a non-zero output, often referred to as a bias or dark offset. Ideally, all pixels would share the same offset, but in practice small pixel-to-pixel variations exist.
DSNU quantifies this spatial variation of offset across the sensor. It is typically reported in electrons (e⁻ RMS) and represents the standard deviation of pixel offsets in a dark or bias frame. DSNU therefore describes a fixed spatial pattern under stable operating conditions—not random noise.
DSNU vs Read Noise
DSNU is fundamentally different from read noise.
● Read noise is temporal and random; it varies from frame to frame and decreases with image averaging.
● DSNU is spatial and time-independent; the offset mismatch between pixels remains constant unless corrected.
In low-light imaging, both contribute to the effective noise floor, but in different ways: read noise defines frame-to-frame uncertainty, while DSNU defines spatial inconsistency in the baseline signal.
DSNU vs PRNU
DSNU refers to offset variation in darkness, whereas PRNU describes gain variation under illumination. DSNU is most relevant in dark or near-dark conditions, while PRNU becomes significant as signal levels increase. Together, they represent the two primary forms of fixed-pattern non-uniformity in image sensors.
Why DSNU Matters in Low-Light Imaging
DSNU becomes important when imaging conditions approach the dark-limited or near-dark regime—where photon signals are weak and the effective noise floor determines performance.
When DSNU Is Negligible
In medium- to high-light conditions, photon shot noise dominates the noise budget. When the signal level reaches hundreds or thousands of electrons per pixel, small offset differences between pixels become insignificant relative to the overall signal. In such cases, DSNU contributes little to visible image noise or quantitative error.
For bright-field or high-SNR applications, DSNU is rarely the limiting factor.
When DSNU Becomes Limiting
In low-light applications using the scientific CMOS camera, signal levels may approach only a few electrons per pixel—or even below 1 e⁻ in extreme cases. Under these conditions, spatial offset variation can become comparable to the signal itself.
If DSNU approaches or exceeds the camera’s read noise, it effectively raises the baseline variation across pixels. Even though read noise averages down with frame stacking, DSNU does not. The spatial offset mismatch remains unless corrected through dark subtraction or calibration.
This becomes critical in applications such as:
● Single-molecule fluorescence imaging
● Quantum or photon-counting experiments
● Dark-field industrial inspection
In these scenarios, DSNU directly influences spatial uniformity, detection thresholds, and quantitative consistency.
DSNU and the Effective Noise Floor
DSNU does not introduce temporal randomness, but it defines how uniform the dark baseline is across the sensor. When the imaging task relies on detecting extremely weak signals above a dark background, this baseline uniformity can become a determining factor in achievable SNR.
Understanding whether DSNU is negligible or limiting requires evaluating it relative to read noise, signal level, and the intended application.
DSNU and Offset Distribution
To interpret DSNU correctly, it is important to understand that it is derived from the spatial distribution of pixel offsets in a dark frame. The DSNU value is not an isolated parameter, but a statistical summary of this underlying offset distribution.
Offset Distribution in a Bias Frame
A dark or bias image is rarely perfectly uniform. Even under stable conditions, each pixel exhibits a slightly different offset value, producing a spatial distribution of dark signal levels across the sensor. This distribution may appear noise-like and unstructured, or it may exhibit subtle column or row-related patterns depending on the readout architecture.
DSNU is a statistical descriptor of this offset distribution. It is typically defined as the standard deviation (RMS) of pixel offsets measured from an averaged dark frame. To suppress temporal read noise and isolate fixed spatial variation, DSNU is often calculated from the mean of thousands of dark frames. The result is reported in electrons (e⁻), allowing direct comparison with read noise and between cameras.
What the DSNU Value Does — and Does Not — Represent
Interpreting the DSNU value requires context. If DSNU is well below the camera’s read noise, its contribution to low-light image degradation is usually minimal. When DSNU approaches or exceeds read noise, spatial baseline variation can influence the effective noise floor and low-signal detectability.
However, a single DSNU number cannot describe all dark-related artefacts. RMS statistics do not capture structured offset patterns such as column banding, nor do they represent time-dependent variations in dark signal. DSNU therefore serves as an important—but incomplete—indicator of low-light performance. Proper evaluation may require examining bias images directly and considering operating mode, temperature, and stability.
Limitations of DSNU as a Performance Metric
While DSNU is an important indicator of dark offset consistency, it does not fully describe low-light image quality.
First, DSNU is typically reported as a single RMS value. This statistic summarizes the spread of pixel offsets but does not capture spatial structure. Column-related offset patterns, localized clusters, or other structured artefacts may not be reflected clearly in the RMS number, even though they can have a noticeable visual or quantitative impact.
Second, DSNU represents time-independent spatial variation under stable conditions. It does not account for temporal dark noise or offset drift caused by temperature fluctuations, electronic instability, or long-term aging. In applications requiring high stability over time, these dynamic behaviours may be equally important.
Finally, DSNU values are often specified under limited operating conditions and may vary across readout modes, gain settings, or temperature ranges. A single headline DSNU number therefore cannot represent performance across all configurations.
DSNU should be interpreted as one component of low-light performance—useful, but not sufficient on its own.
How to Interpret DSNU Specifications
A DSNU value is meaningful only when interpreted in context. Reading a single number from a datasheet without understanding the measurement conditions can lead to misleading conclusions.
Compare DSNU to Read Noise
DSNU should always be evaluated relative to the camera’s read noise.
● If DSNU is significantly lower than read noise, its contribution to low-light degradation is typically minimal.
● If DSNU approaches or exceeds read noise, spatial offset variation may influence the effective noise floor and low-signal detectability.
For example, a DSNU of 0.3 e⁻ in a camera with 2 e⁻ read noise is unlikely to be limiting, whereas 1 e⁻ DSNU in a 1 e⁻ read-noise system may warrant closer attention.
Check Measurement Conditions
DSNU values depend on operating parameters such as:
● Sensor temperature
● Readout mode and bit depth
● Gain settings
● Exposure time
Cooling, in particular, can significantly reduce dark-related effects. Comparing DSNU values across cameras without confirming matched conditions can produce inaccurate conclusions.
Raw vs Corrected DSNU
Some specifications report DSNU after internal offset correction or calibration. When possible, distinguish between:
● Raw DSNU (intrinsic offset variation)
● Residual DSNU after correction
Both values can be informative, but they describe different stages of performance.
A well-specified DSNU value includes its operating conditions, measurement method, and correction state. Without this context, it should be treated as an indicative—not definitive—performance metric.
Applications: Where DSNU Becomes a Real Design Factor
DSNU is rarely a limiting factor in high-light imaging. When photon signals are large, shot noise dominates the noise budget, and small spatial offset variations have minimal impact on image quality or quantitative analysis.
However, DSNU becomes increasingly relevant in low-signal regimes where photon counts approach only a few electrons per pixel. In applications such as single-molecule fluorescence imaging, astronomical observation, or quantum-level experiments, the signal of interest may be comparable to the camera’s read noise. Under these conditions, spatial offset variation can influence background uniformity, detection thresholds, and effective SNR.
Industrial inspection systems can face similar constraints. In semiconductor inspection and precision metrology applications, defect signals may be small relative to the baseline signal. Even subtle offset non-uniformity can affect consistency across the field of view, particularly in systems that rely on background subtraction or threshold-based detection.
In such workflows, DSNU is not simply a specification value—it becomes part of the system-level error budget. Proper dark calibration and operating-mode selection are therefore essential when low-light consistency or defect sensitivity is critical.
In semiconductor inspection systems, offset non-uniformity directly influences defect threshold consistency. A detailed discussion of calibration strategies in this context is provided in Why DSNU/PRNU Correction Matters in Semiconductor Inspection.
Conclusion
Dark Signal Non-Uniformity defines how consistent a sensor’s dark baseline is across pixels. While often negligible in high-light imaging, DSNU can influence the effective noise floor in low-signal applications where read noise and signal levels are comparable. Interpreting DSNU correctly requires considering operating conditions, measurement context, and its relationship to other noise sources.
When low-light consistency or quantitative precision is critical, evaluating DSNU alongside read noise and calibration strategy becomes part of system-level design. For application-specific validation or dark calibration discussions, Tucsen’s engineering team can assist in defining measurement conditions aligned with your imaging workflow.
Tucsen Photonics Co., Ltd. All rights reserved. When citing, please acknowledge the source: www.tucsen.com








