
 2022/02/25
2022/02/25Kameraets billedhastighed beskriver, hvor mange billeder et kamera kan optage pr. sekund, og den behandles ofte som en overordnet specifikation ved evaluering af højhastighedsbilleddannelsessystemer. I dynamiske eksperimenter, inspektionsworkflows eller hurtige biologiske processer bestemmer billedhastigheden direkte, hvor mange tidsmæssige detaljer der kan optages.
Den angivne maksimale billedhastighed er dog ikke en fast værdi. Den afhænger af sensorarkitektur, interesseområde (ROI), eksponeringstid, udlæsningstilstand og datagrænsefladebåndbredde. I praksis er den opnåelige billedhastighed resultatet af flere interagerende faktorer. Forståelse af disse faktorer kræver, at man ser ud over billeder pr. sekund og undersøger, hvordan billedtiden er konstrueret inde i kamerasystemet.
Hvad er kameraets billedfrekvens?
Kameraets billedhastighed refererer til det antal billeder, et kamera kan optage pr. sekund under et defineret sæt driftsforhold. Det udtrykkes typisk i billeder pr. sekund (FPS) og repræsenterer, hvor hurtigt successive billeder kan optages og gøres tilgængelige til behandling eller lagring.
Billedhastigheden bestemmer den tidsmæssige opløsning af et billeddannelsessystem. I dynamiske applikationer – såsom partikelsporing, højhastighedsinspektion eller hurtigt skiftende biologiske processer – muliggør højere billedhastigheder mere detaljeret observation af bevægelse og transiente hændelser.
Billedhastighed er dog ikke en isoleret specifikation. Den maksimalt opnåelige FPS afhænger af kameratilstand, interesseområde (ROI), eksponeringstid, bitdybde og grænsefladebåndbredde. En angivet "maksimal billedhastighed" forudsætter normalt specifikke forhold, såsom reduceret ROI eller en bestemt udlæsningstilstand.
For at forstå, hvad der virkelig begrænser billedhastigheden, skal man undersøge, hvor lang tid det tager at hente og udlæse en enkelt frame – kendt som frametiden – hvilket udforskes i næste afsnit.
Billedhastighed vs. billedtid vs. linjetid
Billedhastighed udtrykkes almindeligvis i billeder per sekund (FPS), men FPS er ikke en primær fysisk parameter. Det er det modsatte af den tid, der kræves for at indsamle og udlæse en enkelt frame.
Billedhastighed = 1 / Billedtid
For at forstå, hvad der bestemmer billedhastigheden, må vi derfor undersøge, hvordan billedtiden er konstrueret.
Hvad udgør billedtiden?
Billedtiden repræsenterer den samlede tid, der kræves for at producere ét komplet billede. I de fleste tilfældeCMOS-kameraer, dette omfatter:
● Eksponeringstid (hvor længe sensoren indsamler lys)
● Sensoraflæsningstid (hvor lang tid det tager at konvertere og overføre pixelværdier)
● Dataoverførselstid (grænsefladeoverførsel til værtscomputeren)
Når eksponeringstiden er kort i forhold til udlæsningstiden, er billedhastigheden typisk begrænset af udlæsningsprocessen. Når eksponeringstiden er lang, kan den i stedet blive den dominerende begrænsende faktor.
Linjetid — Den grundlæggende sensorbegrænsning
For CMOS-sensorer er den primære interne faktor, der begrænser billedhastigheden, linjetiden. Linjetiden er den tid, det tager for en række analog-til-digital-konvertere (ADC'er) at måle og digitalisere én række pixels.
I de fleste arkitekturer behandles hver række sekventielt. Som følge heraf bestemmes den samlede udlæsningstid for en ramme af antallet af aktive rækker ganget med linjetiden:
Rammelæsetid = Linjetid × Antal rækker
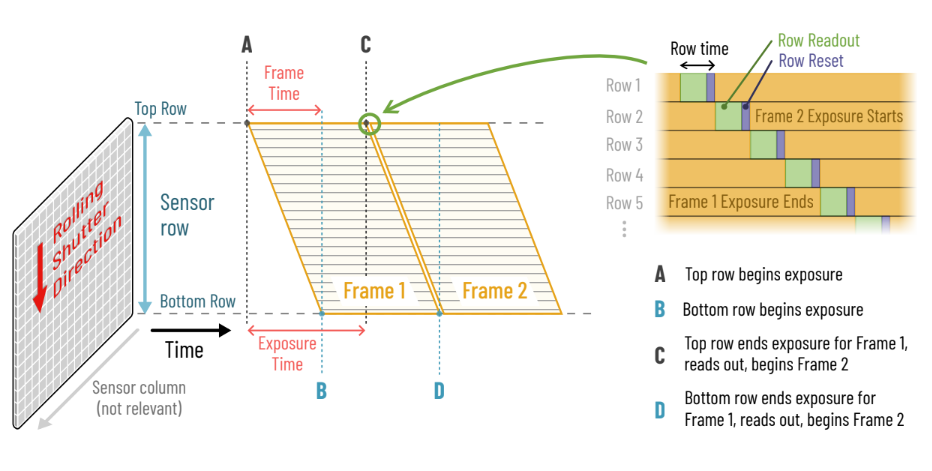
Figur 1: Introduktion til 'Parallelogram'-tidsdiagrammer for rullende lukkere
Venstre:Plot af sensorrække (y-akse) versus tid (x-akse), med gule parallelogrammer, der markerer eksponeringen for hver kamerarække på grund af den rullende lukker.
Højre:Et zoom ind på det individuelle rækkeniveau, der illustrerer rolleaflæsningen og nulstillingsspillet ved bestemmelse af rullende lukkerlinjetid.
Dette forklarer, hvorfor en reduktion af interesseområdet (ROI) – specifikt antallet af pixelrækker – kan øge billedhastigheden betydeligt. Halvering af antallet af rækker halverer cirka udlæsningstiden og kan næsten fordoble den opnåelige FPS, forudsat at andre faktorer forbliver konstante.
Linjetiden kan i sig selv variere mellem aflæsningstilstande, men inden for en given tilstand er den typisk fast.
Teoretisk vs. virkelig billedfrekvens
Den "maksimale billedhastighed", der er angivet i specifikationerne, beregnes normalt udelukkende ud fra billedlæsningstiden. I praksis kan billedhastigheden i den virkelige verden være lavere på grund af:
 ● Længere eksponeringstider
● Længere eksponeringstider
● Begrænsninger i grænsefladebåndbredde
● Forsinkelser i software eller behandling
Af denne grund er det vigtigt at skelne mellem teoretisk maksimal FPS og den opnåelige billedhastighed under dine faktiske driftsforhold.
Sensorniveaufaktorer, der påvirker billedhastigheden
Mens linjetid og billedlæsningstid definerer de grundlæggende tidsgrænser for en sensor, kan adskillige konfigurerbare parametre på kameraniveau have betydelig indflydelse på den opnåelige billedhastighed.
Interesseområde (ROI)
Antallet af aktive pixelrækker bestemmer direkte læsetiden for billeder. Reduktion af højden på interesseområdet mindsker antallet af rækker, der skal læses, og forkorter dermed udlæsningsvarigheden.
Da billedlæsningstiden omtrent skaleres med antallet af rækker, kan en halvering af ROI-højden næsten fordoble den maksimalt opnåelige billedhastighed – forudsat at eksponeringstid og grænsefladebåndbredde ikke er begrænsende faktorer. For applikationer fokuseret på et lille område med bevægelse eller detektion er ROI ofte den mest effektive måde at øge hastigheden på.
Binning og subsampling
Pixelbinning kombinerer tilstødende pixels før udlæsning eller digitalisering, hvilket effektivt reducerer outputopløsningen og den samlede datamængde. Afhængigt af sensorarkitekturen kan binning reducere datagennemstrømningskravene og nogle gange forbedre den effektive billedhastighed.
Binning reducerer dog ikke altid den interne linjetid. I mange CMOS-design læses rækker stadig sekventielt, selv når pixels kombineres. Som et resultat kan binning forbedre dataoverførselseffektiviteten uden væsentligt at ændre den iboende udlæsningstid.
Bitdybde og udlæsningstilstande
Mangevidenskabelige kameraertilbyder flere udlæsningstilstande, hvor hastighed ofte byttes ud med dynamisk område. For eksempel kan en 16-bit tilstand med højt dynamisk område prioritere lav læsestøj og stor fuld brøndkapacitet, mens en 12-bit "hastighedstilstand" kan opnå højere billedhastigheder ved at reducere datapræcisionen eller ændre forstærkningsindstillingerne.

Da højere bitdybde øger mængden af data pr. frame, kan skift til en lavere bitdybde reducere dataoverførselsbelastningen og i nogle tilfælde muliggøre højere billedhastigheder – især når grænsefladebåndbredde er en begrænsende faktor.
Interaktion mellem eksponeringstid og billedhastighed
Billedhastigheden bestemmes ikke udelukkende af sensorens aflæsningstid. Eksponeringsvarigheden kan også begrænse, hvor hurtigt successive billeder kan optages.
Generelt set styres den maksimalt opnåelige billedhastighed af den tidskomponent, der er længst: eksponeringstiden eller billedlæsningstiden. Hvis eksponeringstiden er kortere end udlæsningstiden, begrænser udlæsningen billedhastigheden. Men hvis eksponeringstiden overstiger udlæsningsvarigheden, bliver eksponeringen den dominerende begrænsning.
I mange CMOS-design med rullende lukker kan eksponering og udlæsning delvist overlappe hinanden. Mens én række udlæses, kan andre rækker allerede integrere lys til det næste billede. Denne overlapning gør det muligt at gøre eksponeringstiden kortere end den fulde billedlæsningstid uden nødvendigvis at reducere billedhastigheden.
Men når eksponeringstiden bliver længere end sensorens samlede udlæsningstid – f.eks. ved billeder i svagt lys, der kræver længere integration – falder billedhastigheden proportionalt. I sådanne tilfælde:
Maksimal billedhastighed ≈ 1 / Eksponeringstid
Det er vigtigt at forstå, om dit system er begrænset af udlæsning eller eksponering, når du optimerer optagelseshastigheden. Det kan være mere effektivt at øge forstærkningen, forbedre belysningen eller reducere den nødvendige integrationstid til at øge billedhastigheden end at justere ROI eller udlæsningstilstand alene.
Begrænsninger for grænsefladebåndbredde og datagennemstrømning
Selv hvis en sensor kan udlæse billeder med høj hastighed, kan grænsefladen mellem kameraet og værtscomputeren blive den begrænsende faktor.
Hvert erhvervet billede skal overføres via et datalink – f.eks. USB, Camera Link eller PCIe – til computeren med henblik på behandling eller lagring. Den nødvendige båndbredde afhænger af:
● Billedstørrelse (antal pixels)
● Bitdybde (data pr. pixel)
● Billedhastighed
Datahastigheden kan estimeres som:
Datahastighed ≈ (Pixels pr. billede × Bitdybde × Billedhastighed)
For eksempel genererer en 2048 × 2048 sensor, der opererer med 16-bit dybde og 100 FPS, over 800 MB/s rådata. Hvis grænsefladen ikke kan opretholde denne gennemstrømning, reduceres den effektive billedhastighed, eller billeder kan blive midlertidigt bufferet inde i kameraet.
I mange systemer reducerer reduktion af ROI eller skift til en lavere bitdybde ikke kun udlæsningstiden, men reducerer også den nødvendige båndbredde, hvilket gør det muligt for grænsefladen at opretholde højere FPS.
Det er derfor vigtigt at skelne mellem:
●Sensorbegrænset billedhastighed, bestemt af linjetid og aflæsning
●Grænsefladebegrænset billedhastighed, bestemt af båndbredde og systemkonfiguration
Lagringshastighed, drivereffektivitet og softwareoverhead kan også påvirke ydeevnen i den virkelige verden, især under vedvarende højhastighedsdataoptagelse.
Det er vigtigt at forstå, hvor flaskehalsen ligger – sensortiming eller dataoverførsel – når man skal diagnosticere begrænsninger i billedhastigheden.
Hvorfor din reelle billedhastighed er lavere end specifikationen
Den maksimale billedhastighed, der er angivet i et kameras specifikationsark, beregnes typisk under ideelle forhold – ofte ved hjælp af et reduceret interesseområde (ROI), kort eksponeringstid, specifik udlæsningstilstand og optimal grænsefladekonfiguration. I praksis kan den opnåelige billedhastighed være lavere på grund af flere fælles faktorer.
1. Fuld sensor vs. reduceret ROI
Mange maksimale FPS-værdier angives ved hjælp af et delvist ROI. Hvis du betjener kameraet med fuld sensoropløsning, øger det øgede antal rækker direkte billedlæsningstiden, hvilket reducerer den opnåelige billedhastighed.
2. Eksponeringstiden overstiger aflæsningstiden
Hvis eksponeringstiden er længere end sensorens billedlæsningstid, bliver den den begrænsende faktor. Ved billeder i svagt lys reducerer længere integrationstider naturligt den maksimale FPS, uanset sensorens aflæsningskapacitet.
3. Højere bitdybde eller HDR-tilstande
Drift i 16-bit eller HDR-tilstande øger datamængden og kan ændre udlæsningstimingen. Dette kan reducere den opnåelige billedhastighed sammenlignet med tilstande med lavere bitdybde og "hastighed".
4. Begrænsninger for grænsefladebåndbredde
USB-, Camera Link- eller PCIe-grænseflader har begrænset båndbredde. Hvis den nødvendige datahastighed overstiger den vedvarende grænsefladegennemstrømning, kan den effektive FPS reduceres eller bufferes internt.
5. Software- og behandlingsomkostninger
Triggerkonfiguration, bufferstrategi, lagringshastighed og behandlingsbelastning kan alle påvirke den vedvarende billedhastighed under optagelse i den virkelige verden.
For at diagnosticere uoverensstemmelser i billedhastighed er det vigtigt at identificere, om begrænsningen stammer fra sensortiming, eksponeringsvarighed eller datagennemstrømning. Først efter at have identificeret flaskehalsen kan ydeevnen optimeres effektivt.
Sådan optimerer du billedhastigheden til din applikation
Optimering af billedhastigheden begynder med at identificere den sande begrænsende faktor i dit billedsystem. Når flaskehalsen er forstået, kan målrettede justeringer forbedre billedoptagelseshastigheden betydeligt.
1. Reducer interesseområdet (ROI)
Hvis fuld sensoropløsning ikke er påkrævet, er det ofte den mest effektive måde at øge billedhastigheden på at reducere antallet af aktive rækker. Da billedlæsningstiden skaleres med rækkeantallet, kan det at begrænse optagelsen til interesseområdet øge FPS'en betydeligt.
2. Juster eksponeringstiden
Når eksponeringstiden overstiger udlæsningstiden, bliver den den begrænsende faktor. Øget belysningsintensitet, passende justering af forstærkningen eller lempelse af signalkravene kan muliggøre kortere eksponeringstider og højere opnåelige billedhastigheder.
3. Vælg en passende aflæsningstilstand
Brug, hvis muligt, en hastighedsoptimeret tilstand, når et højt dynamisk område ikke er kritisk. Lavere bitdybde eller alternative forstærkningstilstande kan reducere udlæsning og dataoverførselsbyrde.
4. Kontroller grænseflade og datagennemstrømning
Sørg for, at grænsefladebåndbredden understøtter den nødvendige datahastighed. Reduktion af bitdybden, begrænsning af opløsningen eller opgradering af datalinket kan forbedre den vedvarende ydeevne.
5. Identificér den dominerende begrænsning
Optimering af billedhastighed er mest effektiv, når ændringerne adresserer den sande begrænsende komponent - sensorudlæsning, eksponeringsvarighed eller grænsefladebåndbredde - i stedet for at justere uafhængige parametre.
Konklusion
Kameraets billedhastighed er ikke en fast specifikation, men resultatet af sensortiming, eksponeringsvarighed og datagennemstrømning i samspil under specifikke driftsforhold. Forståelse af forholdet mellem linjetid, billedlæsningstid, eksponeringstid og grænsefladebåndbredde er afgørende, når man evaluerer eller optimerer optagelseshastigheden. I praksis bestemmes den opnåelige billedhastighed af den langsomste komponent i billedkæden.
At Tucsen, billedhastighedsydelsen er konstrueret og valideret inden for reelle systembegrænsninger - herunder udlæsningsarkitektur, tilstandsvalg og grænsefladekonfiguration. Hvis din applikation kræver vedvarende højhastighedsdataoptagelse, kan vores team hjælpe med at evaluere de reelle ydelsesgrænser inden for din specifikke arbejdsgang.
Tucsen Photonics Co., Ltd. Alle rettigheder forbeholdes. Angiv venligst kilden ved henvisning:www.tucsen.com








