
 09/03/2026
09/03/2026La calidad de imagen suele analizarse como si se tratara de una única especificación: mayor resolución, menor ruido o mayor rango dinámico. Sin embargo, en la imagen científica, la calidad de imagen no se define por un solo parámetro. Es el resultado de la interacción entre la señal, el ruido, el rango dinámico, el muestreo espacial y la uniformidad bajo una condición de funcionamiento específica.
Una cámara que produce imágenes visualmente atractivas puede fallar en flujos de trabajo cuantitativos si la uniformidad del fondo varía o si el ruido de baja señal limita la detectabilidad. Por el contrario, un sistema optimizado para alta sensibilidad puede sacrificar el rango dinámico o la precisión espacial.
Para comprender qué determina realmente la calidad de imagen, se requiere una perspectiva a nivel de sistema. Esta guía desglosa los factores físicos que influyen en la calidad de imagen en las cámaras CMOS científicas y explica cómo evaluarlos según la aplicación.
La calidad de la imagen depende de la tarea.
La calidad de imagen no puede definirse independientemente de la tarea de captura. Una misma cámara puede considerarse excelente en una aplicación e inadecuada en otra, dependiendo del nivel de señal, los objetivos de medición y los márgenes de error aceptables. Por lo tanto, la calidad de imagen no es una especificación absoluta, sino que se determina por el rendimiento del sistema en condiciones operativas específicas.
Imagen de consumo frente a imagen científica
En la fotografía de consumo, las escenas suelen estar bien iluminadas y con un fuerte componente visual. En estas condiciones, el rendimiento del objetivo, la resolución espacial y la reproducción cromática son los factores que determinan la calidad percibida. Los pequeños artefactos de patrón fijo o las ligeras variaciones de desplazamiento suelen quedar enmascarados por los altos niveles de señal y el contraste visual.
La obtención de imágenes científicas opera bajo diferentes limitaciones. En entornos con poca luz, como en la microscopía de fluorescencia, la astronomía o los experimentos con limitación de fotones, la señal puede ser de tan solo unos pocos electrones por píxel. En estas condiciones, pueden aparecer fuentes de ruido sutiles, variaciones de desplazamiento, píxeles calientes, brillo o artefactos estructurados, lo que afecta la fiabilidad de las mediciones. La cámara ya no se evalúa únicamente por su atractivo visual, sino también por su capacidad para preservar la integridad de la señal.
¿Cuándo se vuelven significativas las limitaciones en la calidad de la imagen?
Las distintas aplicaciones presentan diferentes desafíos en cuanto a la calidad de la imagen. La inspección de alto rango dinámico puede priorizar la linealidad y la uniformidad. La detección en condiciones de poca luz puede priorizar el ruido de lectura y la estabilidad en la oscuridad. La obtención de imágenes cuantitativas puede requerir tanto precisión como repetibilidad a lo largo del tiempo.
Una aproximación práctica aplicable a diversas situaciones es la siguiente: las limitaciones en la calidad de la imagen se vuelven significativas cuando los artefactos sistemáticos o las no uniformidades son comparables o mayores que el ruido inherente de la señal. Cuando estos efectos se mantienen muy por debajo del nivel de ruido, su impacto práctico es mínimo.
En resumen, la calidad de la imagen viene definida por el régimen de funcionamiento y la precisión que exige la aplicación, no por una única especificación principal.
Señal y ruido: la base de la calidad de imagen.
En esencia, la calidad de imagen en la imagenología científica está determinada por la relación entre la señal y el ruido. Por muy avanzado que sea un sensor, la capacidad de extraer información útil depende de la claridad con la que la señal se eleva por encima del nivel de ruido subyacente.
Nivel de señal y fotoelectrones
In cámaras sCMOSLa formación de la imagen comienza con la generación de fotoelectrones por los fotones en cada píxel. El número de electrones detectados define la señal física real. Los valores de gris digitales (ADU) son simplemente una representación de esta carga tras su amplificación y digitalización. Dado que los ajustes de ganancia pueden modificar la relación entre los electrones y los niveles de gris, el brillo visual por sí solo no define la calidad de la imagen; lo que la define es el recuento subyacente de electrones.
El régimen de señal es importante. A niveles de señal altos, predomina el ruido de disparo de fotones. A niveles de señal bajos, las fuentes de ruido electrónico, como el ruido de lectura y los efectos relacionados con la oscuridad, adquieren mayor relevancia.
Fuentes de ruido en cámaras CMOS científicas
Múltiples componentes de ruido contribuyen a la degradación de la imagen:
● Ruido de disparo de fotones, que aumenta con la raíz cuadrada de la señal.
● Ruido de lectura, introducido durante la conversión de carga a voltaje y la digitalización.
● Variaciones relacionadas con la oscuridad, incluyendoDSNU(variación de desplazamiento)
● Variaciones relacionadas con la ganancia, como por ejemplo:PRNU
Cada fuente se comporta de manera diferente según el nivel de señal. Algunas varían con el brillo; otras permanecen fijas. Comprender qué componente predomina en una condición de funcionamiento determinada es fundamental para evaluar la calidad de la imagen de forma realista.
Relación señal/ruido (SNR) como métrica principal
La relación señal-ruido (SNR) proporciona una forma unificada de evaluar la calidad de la imagen. En lugar de centrarse en especificaciones individuales, la SNR evalúa si la señal de interés se puede distinguir del ruido total.
En condiciones de alta luminosidad, la relación señal-ruido (SNR) suele estar limitada por la estadística de fotones. En condiciones de baja luminosidad, la SNR puede verse limitada por el ruido de lectura o las irregularidades relacionadas con la oscuridad. Por lo tanto, mejorar la calidad de la imagen no se trata simplemente de reducir una especificación, sino que requiere identificar qué fuente de ruido limita el rendimiento en el rango de señal deseado.
En definitiva, la calidad de la imagen mejora cuando la señal aumenta en relación con la fuente de ruido dominante. Identificar dicha fuente dominante es el primer paso en la optimización del sistema.
Reproducción de rango dinámico y contraste
El rango dinámico describe la amplitud entre la señal detectable más pequeña y la señal más grande que un sensor puede registrar antes de la saturación. Define cuánta variación de contraste puede capturar un sistema de imagen en una sola exposición.
Capacidad total del pozo y nivel de ruido
En el extremo superior del rango dinámico se encuentra el sensor.capacidad total del pozo—el número máximo de electrones que un píxel puede almacenar antes de saturarse. En el extremo inferior se encuentra elnivel de ruido, determinado por el ruido de lectura y las contribuciones relacionadas con la oscuridad.
La relación entre la capacidad de pozo completo y el nivel de ruido efectivo define el rango dinámico útil. Una cámara con bajo ruido de lectura pero capacidad de pozo completo limitada puede destacar en la detección con poca luz, mientras que una cámara con alta capacidad de pozo completo puede capturar mejor escenas que contengan simultáneamente elementos brillantes y tenues.
Ventajas e inconvenientes de la iluminación alta y baja
Optimizar una cámara para una sensibilidad extrema suele reducir la capacidad máxima de carga o aumentar la ganancia, lo que puede comprimir el rango dinámico útil. Por el contrario, optimizar para un amplio rango dinámico puede comprometer la detectabilidad de señales débiles.
En consecuencia, la calidad de la imagen debe evaluarse en relación con el régimen de señal esperado. Un sistema diseñado para la obtención de imágenes de fluorescencia tenue prioriza el bajo nivel de ruido. Un sistema destinado a la inspección de campo claro puede priorizar el rango dinámico y la linealidad.
La profundidad de bits no equivale al rango dinámico.
La profundidad de bits define la precisión con la que se digitaliza la señal analógica, pero no crea rango dinámico por sí sola. Si el nivel de ruido analógico es alto, aumentar la profundidad de bits solo subdivide el ruido con mayor precisión; no amplía el rango de señal detectable.
El verdadero rango dinámico está determinado por la física del sensor y las características del ruido, no únicamente por la resolución digital.
Uniformidad y artefactos de patrón fijo
Más allá de la intensidad de la señal y el rango dinámico, la calidad de la imagen también se ve influenciada por la uniformidad espacial. Incluso con niveles bajos de ruido, los artefactos estructurados en el sensor pueden afectar la consistencia del fondo y la fiabilidad cuantitativa.
Desplazamiento y no uniformidad relacionada con la ganancia
In cámaras CMOSCiertas irregularidades aparecen como patrones estáticos o repetibles. Estos artefactos suelen denominarse ruido de patrón fijo (FPN, por sus siglas en inglés) porque su estructura espacial no cambia de un fotograma a otro.
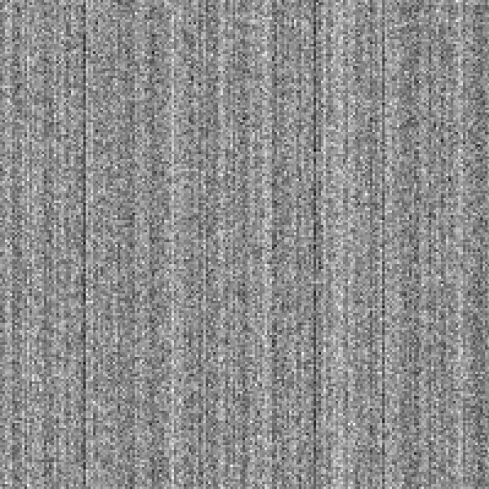
Figura 1: Ruido de columna de patrón fijo
Las diferencias en el valor de compensación del convertidor analógico-digital CMOS entre columnas generan un patrón visible de columnas claras y oscuras que no varía entre fotogramas sucesivos. Esto se observa aquí sin luz incidente. Este patrón puede ser significativo en comparación con el contraste del sujeto en condiciones de poca luz, haciéndose visible a lo largo de las imágenes.
Una causa común es la variación de desplazamiento entre columnas. Muchas arquitecturas CMOS utilizan lectura paralela por columnas, donde cada columna es procesada por un convertidor analógico-digital (ADC) dedicado. Pequeñas diferencias entre los desplazamientos del ADC pueden generar bandas verticales visibles en condiciones de baja iluminación o polarización. En diseños con sensores divididos, también puede aparecer una división horizontal en el fotograma.
Con menos frecuencia, pueden aparecer patrones relacionados con las filas cuando estas se leen en paralelo con ligeras discrepancias de desplazamiento. Si bien estos patrones pueden ser sutiles, el sistema visual humano es particularmente sensible a la repetición estructurada, lo que los hace más perceptibles que el ruido puramente aleatorio.
¿Cuándo afectan los artefactos estructurados a la calidad de la imagen?
Los patrones fijos relacionados con el desplazamiento son más visibles en regímenes de baja señal, donde la señal subyacente no enmascara la variación espacial. En sistemas más antiguos o de menor calidad, estos artefactos pueden hacerse visibles incluso con niveles de señal moderados. En las cámaras sCMOS modernas y bien calibradas, los patrones de columnas y filas se reducen normalmente a niveles inferiores al ruido de lectura y, por lo tanto, no son perceptibles en condiciones de imagen estándar.
Sin embargo, los artefactos estructurados pueden hacerse más evidentes en flujos de trabajo que implican el promedio de fotogramas, la sustracción de fondo o el análisis automatizado. Debido a que estos patrones son sistemáticos, no desaparecen con el promedio como el ruido aleatorio.
Por qué las especificaciones pueden no revelar patrones estructurados
A diferencia de DSNU, que cuantifica estadísticamente la variación de desplazamiento, los patrones estructurados no se capturan completamente con un solo valor RMS. Las hojas de especificaciones rara vez incluyen imágenes representativas de sesgo de baja luminosidad, lo que dificulta evaluar los artefactos estructurados basándose únicamente en datos numéricos.
En aplicaciones donde la uniformidad es fundamental, puede ser necesaria una evaluación empírica, especialmente en condiciones de señal baja o promediadas, para confirmar que los artefactos espaciales no influyen en el análisis.
La resolución no es lo mismo que la calidad de la imagen.
A menudo se confunde la resolución con el principal indicador de la calidad de la imagen. Si bien la resolución espacial define con qué precisión se pueden muestrear o distinguir los detalles, no garantiza datos significativos ni exactos.
Un mayor número de píxeles o un menor tamaño de píxel aumentan la densidad de muestreo, pero no reducen el ruido, mejoran el rango dinámico ni la uniformidad. Si la relación señal-ruido es baja, aumentar la resolución puede simplemente dividir el ruido en píxeles más pequeños sin mejorar la detectabilidad. En imágenes con muy poca luz, los píxeles más grandes con mayor capacidad de pozo completo y menor ruido de lectura pueden producir una mejor calidad de imagen general, incluso si la resolución nominal es menor.
La resolución real del sistema también depende de la óptica, el aumento y las condiciones de muestreo, no solo de las especificaciones del sensor. Un sistema de imagen está limitado por su componente más débil.
En la imagen científica, la resolución contribuye a la calidad de la imagen, pero solo en equilibrio con el rendimiento en cuanto al ruido, el rango dinámico y la estabilidad. Un mayor número de píxeles por sí solo no garantiza mejores datos.
Cómo combinarlo todo: cómo evaluar la calidad de la imagen
Evaluar la calidad de imagen en el ámbito científico requiere más que leer una sola especificación. Un enfoque sistemático ayuda a identificar qué factores son realmente importantes para una aplicación determinada.
1. Defina el régimen de la señal.
Determine si su sistema opera en un entorno con limitación de fotones, con limitación de ruido de lectura o con señal alta. La fuente de ruido dominante cambia con el nivel de señal, al igual que la métrica de rendimiento correspondiente.
2. Identifique el factor limitante.
Con niveles de señal bajos, el ruido de lectura y los efectos relacionados con la oscuridad suelen predominar. Con niveles de señal altos, el rango dinámico, la linealidad o la uniformidad pueden adquirir mayor importancia. Mejorar una especificación que no sea limitante rara vez mejora la calidad real de la imagen.
3. Evaluar la consistencia espacial.
Evalúe si los artefactos de patrones fijos o las no uniformidades son significativos en relación con el nivel de ruido. Las variaciones estructuradas pueden afectar los flujos de trabajo cuantitativos incluso cuando el ruido general parece bajo.
4. Considere el contexto del sistema.
La óptica, la estabilidad de la iluminación y la estrategia de calibración influyen en la calidad final de la imagen. El rendimiento del sensor no puede evaluarse de forma aislada del sistema de imagen.
En definitiva, la calidad de la imagen no se define por las especificaciones más altas, sino por la capacidad del sistema para preservar la señal relevante en condiciones de funcionamiento reales.
Ejemplos de aplicación
Las prioridades en cuanto a la calidad de imagen varían significativamente entre las aplicaciones científicas e industriales. Los principales factores limitantes dependen del régimen de la señal, los objetivos de medición y la tolerancia al error sistemático.
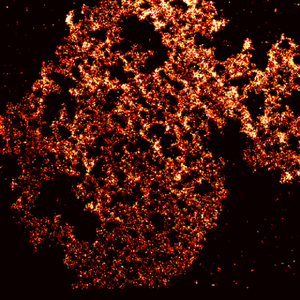
Microscopía de fluorescencia
En imágenes de fluorescencia, particularmente enfluorescencia de molécula únicaEn los experimentos, los niveles de señal pueden alcanzar tan solo unos pocos electrones por píxel. Por lo tanto, la calidad de la imagen se ve fuertemente influenciada por el ruido de lectura, la estabilidad de la oscuridad y la uniformidad del fondo. Los artefactos de desplazamiento estructurados o los píxeles calientes pueden interferir con la detección de señales débiles y el análisis cuantitativo de la intensidad. En este régimen, la sensibilidad y el rendimiento con bajo nivel de ruido suelen ser más importantes que un rango dinámico extremo.
Los sistemas de inspección suelen operar con niveles de señal de moderados a altos, pero requieren una uniformidad y repetibilidad excelentes. Incluso variaciones sutiles de ganancia o desplazamiento pueden influir en los umbrales de detección de defectos o en la precisión de la sustracción del fondo. En estos casos, la linealidad, el rango dinámico y la consistencia espacial suelen ser más importantes que la sensibilidad bruta.

Conclusión
La calidad de imagen en la imagen científica no se define mediante una única especificación. Surge del equilibrio entre el nivel de señal, las fuentes de ruido, el rango dinámico, la resolución espacial y la uniformidad en condiciones de funcionamiento reales. Una misma cámara puede tener un rendimiento diferente según si el sistema está limitado por fotones, por rango dinámico o por requisitos de consistencia espacial. Por lo tanto, una evaluación significativa requiere comprender el régimen de ruido dominante y la precisión que exige la aplicación.
At TucsonLa calidad de imagen se aborda como un desafío de ingeniería a nivel de sistema, considerando la física del sensor, la estrategia de calibración y las limitaciones específicas de la aplicación. Si su flujo de trabajo exige fiabilidad cuantitativa o una sensibilidad extrema, nuestro equipo puede ayudarle a evaluar el rendimiento en el contexto que realmente importa.
Tucsen Photonics Co., Ltd. Todos los derechos reservados. Al citar, por favor, indique la fuente:www.tucsen.com








