
 25.2.2022
25.2.2022Kameran kuvataajuus kuvaa, kuinka monta kuvaa kamera pystyy ottamaan sekunnissa, ja sitä pidetään usein päämääritelmänä arvioitaessa nopeita kuvantamisjärjestelmiä. Dynaamisissa kokeissa, tarkastustyönkuluissa tai nopeissa biologisissa prosesseissa kuvataajuus määrää suoraan, kuinka paljon ajallisia yksityiskohtia voidaan tallentaa.
Määritetty enimmäiskuvataajuus ei kuitenkaan ole kiinteä arvo. Se riippuu kennon arkkitehtuurista, kiinnostusalueesta (ROI), valotusajasta, lukutilasta ja dataliitännän kaistanleveydestä. Käytännössä saavutettavissa oleva kuvataajuus on useiden vuorovaikutuksessa olevien tekijöiden summa. Näiden tekijöiden ymmärtäminen edellyttää pelkän kuvamäärän (frames per second) ylittämistä ja sen tarkastelua, miten kuvataajuus rakentuu kamerajärjestelmän sisällä.
Mikä on kameran kuvataajuus?
Kameran kuvataajuus viittaa kuvien määrään, jonka kamera pystyy ottamaan sekunnissa tietyissä käyttöolosuhteissa. Se ilmaistaan tyypillisesti kuvina sekunnissa (FPS), ja se kuvaa sitä, kuinka nopeasti peräkkäisiä kuvia voidaan ottaa ja asettaa saataville käsittelyä tai tallennusta varten.
Kuvataajuus määrittää kuvantamisjärjestelmän ajallisen resoluution. Dynaamisissa sovelluksissa – kuten hiukkasten seurannassa, suurnopeustarkastuksissa tai nopeasti muuttuvissa biologisissa prosesseissa – suuremmat kuvataajuudet mahdollistavat liikkeen ja transienttien yksityiskohtaisemman havainnoinnin.
Kuvataajuus ei kuitenkaan ole erillinen ominaisuus. Suurin saavutettavissa oleva kuvataajuus riippuu kameratilasta, kiinnostusalueesta (ROI), valotusajasta, bittisyvyydestä ja liitännän kaistanleveydestä. Mainittu "suurin kuvataajuus" edellyttää yleensä tiettyjä olosuhteita, kuten pienempää ROI:ta tai tiettyä lukutilaa.
Ymmärtääksemme, mikä todella rajoittaa kuvataajuutta, on tarkasteltava, kuinka kauan yhden kuvan hakeminen ja lukeminen kestää – tätä kutsutaan kuvataajuudeksi – mitä tarkastellaan seuraavassa osiossa.
Kuvataajuus vs. kuva-aika vs. riviaika
Kuvataajuus ilmaistaan yleensä kehyksinä sekunnissa (FPS), mutta FPS ei ole ensisijainen fyysinen parametri. Se on käänteisluku yhteen kehykseen tallentumiseen ja lukemiseen kuluvalle ajalle.
Kuvataajuus = 1 / Kuvan kesto
Ymmärtääksemme, mikä määrää kuvataajuuden, meidän on tutkittava, miten kuva-aika rakentuu.
Mistä ruudun kesto koostuu?
Kuvan toistoaika edustaa kokonaisaikaa, joka tarvitaan yhden kuvan tuottamiseen. Useimmissa tapauksissaCMOS-kamerat, tämä sisältää:
● Valotusaika (kuinka kauan anturi kerää valoa)
● Anturin lukuaika (kuinka kauan pikseliarvojen muuntaminen ja siirtäminen kestää)
● Tiedonsiirtoaika (rajapinnan tiedonsiirto isäntätietokoneelle)
Kun valotusaika on lyhyt suhteessa lukuaikaan, lukuprosessi tyypillisesti rajoittaa kuvataajuutta. Kun valotusaika on pitkä, siitä voi sen sijaan tulla hallitseva rajoittava tekijä.
Linja-aika — anturin perusrajoitus
CMOS-kennojen ensisijainen sisäinen kuvataajuutta rajoittava tekijä on juova-aika. Juova-aika on aika, joka analogia-digitaalimuuntimien (ADC) riviltä kuluu yhden pikselirivin mittaamiseen ja digitointiin.
Useimmissa arkkitehtuureissa jokainen rivi käsitellään peräkkäin. Tämän seurauksena kehyksen kokonaislukuaika määräytyy aktiivisten rivien lukumäärän ja rivin keston perusteella:
Kehyksen lukuaika = Rivin kesto × Rivien lukumäärä
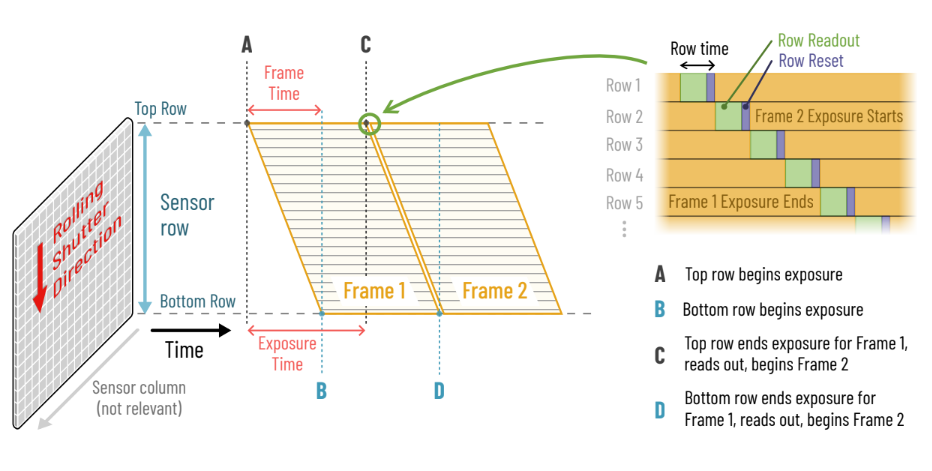
Kuva 1: Johdatus 'Suunnikkaalla' pyörivän sulkimen ajoituskaavioihin
Vasen:Anturivi (y-akseli) ajan funktiona (x-akseli), jossa keltaiset suunnikkaat merkitsevät kunkin kamerarivin valotusta rullaavan sulkimen toiminnan vuoksi.
Oikea:Lähennetään yksittäisen rivin tasoa, joka havainnollistaa roolilukeman ja nollauspelin vaikutusta sulkimen viivan keston määrittämiseen.
Tämä selittää, miksi kiinnostusalueen (ROI) – erityisesti pikselirivien määrän – pienentäminen voi merkittävästi lisätä kuvataajuutta. Rivien määrän puolittaminen puolittaa lukuajan ja voi lähes kaksinkertaistaa saavutettavan kuvanopeuden (FPS), olettaen että muut tekijät pysyvät vakioina.
Itse linja-aika voi vaihdella lukutilojen välillä, mutta tietyn tilan sisällä se on tyypillisesti kiinteä.
Teoreettinen vs. todellinen kuvataajuus
Teknisissä tiedoissa mainittu "suurin kuvataajuus" lasketaan yleensä pelkästään kuvanlukuajasta. Käytännössä todellinen kuvataajuus voi olla alhaisempi seuraavista syistä:
 ● Pidemmät valotusajat
● Pidemmät valotusajat
● Liitännän kaistanleveyden rajoitukset
● Ohjelmisto- tai käsittelyviiveet
Tästä syystä on tärkeää erottaa teoreettinen maksimikuvafrekvenssi (FPS) ja saavutettavissa oleva kuvataajuus (FPS) todellisissa käyttöolosuhteissa.
Kehysnopeuteen vaikuttavat anturitason tekijät
Vaikka juovan ja kuvan lukuaika määrittävät anturin perusajoitusrajat, useat kameratasolla konfiguroitavat parametrit voivat vaikuttaa merkittävästi saavutettavaan kuvataajuuteen.
Kiinnostava alue (ROI)
Aktiivisten pikselirivien määrä määrää suoraan kehyksen lukuajan. Kiinnostavan alueen korkeuden pienentäminen vähentää luettavien rivien määrää, mikä lyhentää lukuaikaa.
Koska ruudunlukuaika skaalautuu suunnilleen rivien lukumäärän mukaan, ROI-alueen korkeuden puolittaminen voi lähes kaksinkertaistaa saavutettavan maksimiruuduntaajuuden – olettaen, että valotusaika ja rajapinnan kaistanleveys eivät ole rajoittavia tekijöitä. Sovelluksissa, jotka keskittyvät pieneen liike- tai tunnistusalueeseen, ROI on usein tehokkain tapa lisätä nopeutta.
Lajittelu ja alinäytteenotto
Pikselin binning-menetelmä yhdistää vierekkäiset pikselit ennen lukemista tai digitointia, mikä tehokkaasti vähentää lähtöresoluutiota ja kokonaisdatamäärää. Anturin arkkitehtuurista riippuen binning-menetelmä voi vähentää tiedonsiirtovaatimuksia ja joskus parantaa tehokasta kuvataajuutta.
Sidonnan käyttö ei kuitenkaan aina lyhennä sisäistä riviaikaa. Monissa CMOS-malleissa rivit luetaan edelleen peräkkäin, vaikka pikseleitä yhdistettäisiin. Tämän seurauksena sidonta voi parantaa tiedonsiirron tehokkuutta muuttamatta merkittävästi sisäistä lukuaikaa.
Bittisyvyyden ja lukemistilat
Monettieteelliset kamerattarjoavat useita lukutiloja, joissa usein vaihdetaan dynaaminen alue nopeuden kustannuksella. Esimerkiksi 16-bittinen laaja dynaaminen alue -tila voi priorisoida matalaa lukukohinaa ja suurta täyden kaivon kapasiteettia, kun taas 12-bittinen ”nopeustila” voi saavuttaa suuremman kuvataajuuden vähentämällä datan tarkkuutta tai muuttamalla vahvistusasetuksia.

Koska suurempi bittisyvyys lisää datan määrää kehystä kohden, vaihtaminen pienempään bittisyvyyteen voi vähentää tiedonsiirron kuormitusta ja joissakin tapauksissa mahdollistaa suuremmat kuvanopeudet – varsinkin kun rajapinnan kaistanleveys on rajoittava tekijä.
Valotusajan ja kuvataajuuden vuorovaikutus
Kuvataajuutta ei määräydy pelkästään kennon lukuajan perusteella. Myös valotuksen kesto voi rajoittaa sitä, kuinka nopeasti peräkkäisiä kuvia voidaan ottaa.
Yleisesti ottaen suurin saavutettavissa oleva kuvataajuus määräytyy sen mukaan, kumpi aikakomponentti on pidempi: valotusaika tai kuvan lukuaika. Jos valotusaika on lyhyempi kuin lukuaika, lukema rajoittaa kuvataajuus. Jos valotusaika kuitenkin ylittää lukuajan, valotuksesta tulee hallitseva rajoite.
Monissa rullaavalla sulkimella varustetuissa CMOS-kennoissa valotus ja lukema voivat osittain mennä päällekkäin. Kun yhtä riviä luetaan, muut rivit saattavat jo integroida valoa seuraavaa kuvaa varten. Tämä päällekkäisyys mahdollistaa valotusajan lyhentämisen kuin koko kuvan lukuaika ilman, että kuvataajuus välttämättä pienenee.
Kuitenkin, kun valotusaika on pidempi kuin anturin kokonaislukuaika – kuten hämäräkuvauksessa, joka vaatii pidempää integrointiaikaa – kuvataajuus pienenee suhteessa. Tällaisissa tapauksissa:
Suurin kuvataajuus ≈ 1 / Valotusaika
On tärkeää ymmärtää, onko järjestelmäsi lukemarajoitettu vai valotusrajoitettu, kun optimoidaan kuvausnopeutta. Vahvistuksen lisääminen, valaistuksen parantaminen tai vaadittavan integrointiajan lyhentäminen voi olla tehokkaampaa kuvataajuuden nostamiseksi kuin pelkästään ROI:n tai lukutilan säätäminen.
Rajapinnan kaistanleveyden ja tiedonsiirtonopeuden rajoitukset
Vaikka anturi pystyisi lukemaan kuvia nopeasti, kameran ja isäntätietokoneen välinen rajapinta voi olla rajoittava tekijä.
Jokainen hankittu kehys on siirrettävä tietokoneeseen käsittelyä tai tallennusta varten datayhteyden, kuten USB:n, kameralinkin tai PCIe:n, kautta. Vaadittava kaistanleveys riippuu:
● Kehyksen koko (pikseleiden määrä)
● Bittisyvyys (dataa pikseliä kohden)
● Kuvataajuus
Tiedonsiirtonopeus voidaan arvioida seuraavasti:
Tiedonsiirtonopeus ≈ (Pikseleitä kehystä kohden × Bittisyvyys × Kehystaajuus)
Esimerkiksi 2048 × 2048 -sensori, joka toimii 16-bittisellä syvyydellä ja 100 FPS:n nopeudella, tuottaa yli 800 Mt/s raakadataa. Jos rajapinta ei pysty ylläpitämään tätä läpimenoaikaa, efektiivinen kuvataajuus pienenee tai kuvat voidaan puskuroida väliaikaisesti kameran sisällä.
Monissa järjestelmissä ROI:n pienentäminen tai vaihtaminen alempaan bittisyvyyteen ei ainoastaan lyhennä lukuaikaa, vaan myös vähentää tarvittavaa kaistanleveyttä, jolloin liitäntä pystyy ylläpitämään korkeampaa FPS:ää.
Siksi on tärkeää erottaa toisistaan:
●Anturin rajoittama kuvataajuus, määritettynä linja-ajan ja lukeman perusteella
●Käyttöliittymärajoitettu kuvataajuus, määräytyy kaistanleveyden ja järjestelmän kokoonpanon mukaan
Tallennusnopeus, ajurin tehokkuus ja ohjelmistojen käyttö voivat myös vaikuttaa suorituskykyyn käytännössä, erityisesti jatkuvan nopean tiedonkeruun aikana.
Kuvataajuuden rajoitusten diagnosoinnissa on tärkeää ymmärtää, missä pullonkaula sijaitsee – anturin ajoitus vai tiedonsiirto.
Miksi todellinen kuvataajuus on alhaisempi kuin spesifikaatiossa
Kameran teknisissä tiedoissa mainittu enimmäiskuvataajuus lasketaan tyypillisesti ihanteellisissa olosuhteissa – usein käyttämällä pienempää kiinnostusaluetta (ROI), lyhyttä valotusaikaa, tiettyä lukutilaa ja optimaalista käyttöliittymäkonfiguraatiota. Käytännössä saavutettavissa oleva kuvataajuus voi olla alhaisempi useiden yleisten tekijöiden vuoksi.
1. Täysi sensori vs. alennettu sijoitetun pääoman tuottoprosentti
Monet maksimikuvafrekvenssit ilmoitetaan osittaisen sijoitetun pääoman tuottoprosentin (ROI) avulla. Jos kameraa käytetään täydellä kennon resoluutiolla, lisääntynyt rivimäärä pidentää suoraan kuvanlukuaikaa ja vähentää saavutettavissa olevaa kuvataajuutta.
2. Valotusaika ylittää lukema-ajan
Jos valotusaika on pidempi kuin kennon kuvanlukuaika, siitä tulee rajoittava tekijä. Hämärässä kuvattaessa pidemmät integrointiajat luonnollisesti vähentävät maksimikuvafrekvenssiä kennon lukukyvystä riippumatta.
3. Suurempi bittisyvyys tai HDR-tilat
16-bittisessä tai laajan dynaamisen alueen tilassa toimiminen lisää datamäärää ja voi muuttaa lukuajoitusta. Tämä voi pienentää saavutettavissa olevaa kuvanopeutta verrattuna matalamman bittisyvyyden tiloihin.
4. Rajapinnan kaistanleveyden rajoitukset
USB-, Camera Link- tai PCIe-liitännöillä on rajallinen kaistanleveys. Jos vaadittu tiedonsiirtonopeus ylittää jatkuvan liitännän läpimenon, tehokasta kuvanopeutta voidaan pienentää tai puskuroida sisäisesti.
5. Ohjelmisto- ja prosessointikustannukset
Liipaisinasetukset, puskurointistrategia, tallennusnopeus ja prosessointikuorma voivat kaikki vaikuttaa jatkuvaan kuvataajuuteen reaalimaailman tiedonkeruun aikana.
Kuvataajuuden erojen diagnosoimiseksi on tärkeää tunnistaa, johtuuko rajoitus anturin ajoituksesta, valotuksen kestosta vai tiedonsiirtonopeudesta. Vasta pullonkaulan tunnistamisen jälkeen suorituskykyä voidaan optimoida tehokkaasti.
Kuinka optimoida kehyksen nopeus sovelluksellesi
Kuvataajuuden optimointi alkaa kuvantamisjärjestelmän todellisen rajoittavan tekijän tunnistamisesta. Kun pullonkaula on ymmärretty, kohdennetut säädöt voivat parantaa merkittävästi kuvausnopeutta.
1. Pienennä kiinnostuksen kohteena olevaa aluetta (ROI)
Jos täyttä sensoriresoluutiota ei tarvita, aktiivisten rivien määrän vähentäminen on usein tehokkain tapa lisätä kuvanopeutta. Koska kuvanlukuaika skaalautuu rivien määrän mukaan, kuvankaappauksen rajoittaminen kiinnostuksen kohteena olevaan alueeseen voi parantaa kuvanopeutta huomattavasti.
2. Säädä valotusaikaa
Kun valotusaika ylittää lukuajan, siitä tulee rajoittava tekijä. Valaistuksen voimakkuuden lisääminen, vahvistuksen säätäminen asianmukaisesti tai signaalivaatimusten lieventäminen voi mahdollistaa lyhyemmät valotusajat ja suuremmat saavutettavat kuvataajuudet.
3. Valitse sopiva lukematila
Jos mahdollista, käytä nopeusoptimoitua tilaa, kun laaja dynaaminen alue ei ole kriittinen. Pienempi bittisyvyys tai vaihtoehtoiset vahvistustilat voivat vähentää luku- ja tiedonsiirtokuormitusta.
4. Tarkista rajapinta ja tiedonsiirtonopeus
Varmista, että liitännän kaistanleveys tukee vaadittua tiedonsiirtonopeutta. Bittisyvyyden pienentäminen, resoluution rajoittaminen tai tiedonsiirtoyhteyden päivittäminen voivat parantaa jatkuvaa suorituskykyä.
5. Tunnista vallitseva rajoite
Kuvataajuuden optimointi on tehokkainta, kun muutokset koskevat todellista rajoittavaa komponenttia – anturin lukemaa, valotuksen kestoa tai rajapinnan kaistanleveyttä – sen sijaan, että säädettäisiin epäolennaisia parametreja.
Johtopäätös
Kameran kuvanopeus ei ole kiinteä spesifikaatio, vaan anturin ajoituksen, valotusajan ja tiedonsiirron yhteisvaikutuksen tulos tietyissä käyttöolosuhteissa. Juovanopeuden, kuvanlukuajan, valotusajan ja rajapinnan kaistanleveyden välisen suhteen ymmärtäminen on olennaista arvioitaessa tai optimoitaessa kuvausnopeutta. Käytännössä saavutettavissa oleva kuvanopeus määräytyy kuvausketjun hitaimman komponentin mukaan.
At Tucsen, kuvanopeuden suorituskyky suunnitellaan ja validoidaan todellisten järjestelmärajoitusten puitteissa – mukaan lukien lukuarkkitehtuuri, tilan valinta ja käyttöliittymän kokoonpano. Jos sovelluksesi vaatii jatkuvaa nopeaa tiedonkeruua, tiimimme voi auttaa arvioimaan todelliset suorituskykyrajoitukset omassa työnkulussasi.
Tucsen Photonics Co., Ltd. Kaikki oikeudet pidätetään. Mainitse lähde lainatessasi:www.tucsen.com








