
 2026/03/09
2026/03/09Kuvanlaadusta puhutaan usein ikään kuin se olisi yksi ainoa ominaisuus – korkeampi resoluutio, vähemmän kohinaa tai suurempi dynaaminen alue. Tieteellisessä kuvantamisessa kuvanlaatua ei kuitenkaan määritellä millään yhdellä parametrilla. Se on tulos siitä, miten signaali, kohina, dynaaminen alue, spatiaalinen näytteenotto ja yhdenmukaisuus vaikuttavat toisiinsa tietyissä käyttöolosuhteissa.
Kamera, joka tuottaa visuaalisesti miellyttäviä kuvia, voi silti epäonnistua kvantitatiivisissa työnkuluissa, jos taustan tasaisuus vaihtelee tai heikko signaalikohina rajoittaa havaittavuutta. Toisaalta järjestelmä, joka on optimoitu suurelle herkkyydelle, voi heikentää dynaamista aluetta tai spatiaalista tarkkuutta.
Kuvanlaadun todellisen vaikutuksen ymmärtäminen vaatii järjestelmätason näkökulmaa. Tämä opas erittelee tieteellisten CMOS-kameroiden kuvanlaatua muokkaavat fyysiset tekijät ja selittää, miten niitä voidaan arvioida sovelluksesi perusteella.
Kuvanlaatu on tehtävästä riippuvainen
Kuvanlaatua ei voida määritellä erillään kuvantamistehtävästä. Sama kamera voidaan katsoa erinomaiseksi yhdessä sovelluksessa ja riittämättömäksi toisessa signaalin tasosta, mittaustavoitteista ja hyväksyttävistä virhemarginaaleista riippuen. Kuvanlaatu ei siis ole absoluuttinen spesifikaatio – se määräytyy sen mukaan, miten järjestelmä toimii tietyissä käyttöolosuhteissa.
Kuluttajakuvantaminen vs. tieteellinen kuvantaminen
Kuluttajavalokuvauksessa kohtaukset ovat tyypillisesti hyvin valaistuja ja visuaalisesti ohjattuja. Tällaisissa olosuhteissa objektiivin suorituskyky, spatiaalinen resoluutio ja värintoisto hallitsevat havaittua laatua. Pienet kiinteäkuvioiset artefaktit tai pienet siirtymävaihtelut peittyvät yleensä voimakkaiden signaalitasojen ja visuaalisen kontrastin alle.
Tieteellinen kuvantaminen toimii erilaisten rajoitusten alaisena. Hämärässä valaistuksessa – kuten fluoresenssimikroskopiassa, tähtitieteessä tai fotonirajoitetuissa kokeissa – signaali voi lähestyä vain muutamaa elektronia pikseliä kohden. Näissä olosuhteissa hienovaraiset kohinalähteet, siirtymän vaihtelut, kuumat pikselit, hehku tai strukturoidut artefaktit voivat tulla näkyviin ja vaikuttaa mittausten luotettavuuteen. Kameraa ei enää arvioida pelkästään visuaalisen vetovoiman perusteella, vaan sen kyvyn perusteella säilyttää signaalin eheys.
Milloin kuvanlaadun rajoituksista tulee merkittäviä?
Eri sovelluksissa kuvanlaadulle on erilaisia haasteita. Laajan dynaamisen alueen tarkastus voi priorisoida lineaarisuutta ja tasaisuutta. Hämärän valon tunnistus voi priorisoida lukukohinaa ja tummasäilytystä. Kvantitatiivinen kuvantaminen voi vaatia sekä tarkkuutta että toistettavuutta ajan kuluessa.
Käytännön arvio, joka pätee kaikkiin sovelluksiin, on seuraava: kuvanlaadun rajoituksista tulee merkittäviä, kun systemaattiset artefaktat tai epätasaisuudet ovat verrattavissa signaalin omaan kohinaan tai sitä suurempia. Kun tällaiset vaikutukset pysyvät selvästi kohinatason alapuolella, niiden käytännön vaikutus on minimaalinen.
Lyhyesti sanottuna kuvanlaatu määräytyy käyttötilan ja sovelluksen vaatiman tarkkuuden mukaan – ei yhden pääspesifikaation mukaan.
Signaali ja kohina — kuvanlaadun perusta
Tieteellisen kuvantamisen kuvanlaatu määräytyy pohjimmiltaan signaalin ja kohinan välisen suhteen perusteella. Riippumatta siitä, kuinka kehittynyt anturi on, merkityksellisen tiedon poimiminen riippuu siitä, kuinka selvästi signaali nousee taustalla olevan kohinan yläpuolelle.
Signaalitaso ja fotoelektronit
In sCMOS-kameratKuvan muodostuminen alkaa fotoneilla, jotka tuottavat fotoelektroneja jokaisessa pikselissä. Kerättyjen elektronien lukumäärä määrittää todellisen fyysisen signaalin. Digitaaliset harmaasävyt (ADU) ovat yksinkertaisesti tämän varauksen esitys vahvistuksen ja digitoinnin jälkeen. Koska vahvistusasetukset voivat muuttaa elektronien ja harmaasävyjen välistä vastaavuutta, pelkkä visuaalinen kirkkaus ei määritä kuvanlaatua – sen määrää taustalla oleva elektronien määrä.
Signaalialueella on merkitystä. Korkeilla signaalitasoilla fotonien laukaisema kohina on hallitsevaa. Matalilla signaalitasoilla elektroniset kohinalähteet, kuten lukukohina ja pimeyteen liittyvät vaikutukset, tulevat merkittävämmiksi.
Tieteellisten CMOS-kameroiden kohinalähteet
Useat kohinakomponentit vaikuttavat kuvan heikkenemiseen:
● Fotonien laukaisema kohina, joka skaalautuu signaalin neliöjuuren kanssa
● Lukukohina, jota syntyy varausjännitteeksi muuntamisen ja digitoinnin aikana
● Pimeyteen liittyvät variaatiot, mukaan lukienDSNU(offset-vaihtelu)
● Vahvistukseen liittyvät vaihtelut, kutenPRNU
Jokainen lähde käyttäytyy eri tavoin eri signaalitasoilla. Jotkut skaalautuvat kirkkauden mukaan; toiset pysyvät kiinteinä. Sen ymmärtäminen, mikä komponentti on hallitseva tietyissä käyttöolosuhteissa, on olennaista kuvanlaadun realistisen arvioinnin kannalta.
Signaali-kohinasuhde (SNR) ensisijaisena mittarina
Signaali-kohinasuhde (SNR) tarjoaa yhtenäisen tavan arvioida kuvanlaatua. Yksittäisten ominaisuuksien tarkastelun sijaan SNR arvioi, onko kiinnostuksen kohteena oleva signaali erotettavissa kokonaiskohinasta.
Kirkkaissa valaistusolosuhteissa signaali-kohinasuhdetta rajoittavat usein fotonitilastot. Hämärissä valaistusolosuhteissa lukukohina tai pimeyteen liittyvät epätasaisuudet voivat rajoittaa signaali-kohinasuhdetta. Tämän seurauksena kuvanlaadun parantaminen ei ole pelkästään yhden spesifikaation heikentämistä – se edellyttää suorituskykyä rajoittavan kohinanlähteen tunnistamista aiotulla signaalialueella.
Viime kädessä kuvanlaatu paranee, kun signaali kasvaa suhteessa vallitsevaan kohinalähteeseen. Tämän vallitsevan lähteen tunnistaminen on ensimmäinen askel järjestelmätason optimoinnissa.
Dynamiikka-alue ja kontrastin toisto
Dynaaminen alue kuvaa etäisyyttä pienimmän havaittavan signaalin ja suurimman signaalin välillä, jonka anturi pystyy tallentamaan ennen saturaatiota. Se määrittää, kuinka paljon kontrastin vaihtelua kuvantamisjärjestelmä voi tallentaa yhdellä valotuksella.
Täysi kaivokapasiteetti ja melutaso
Dynaamisen alueen yläpäässä on kennontäysi kaivokapasiteetti—pikseliin mahtuvien elektronien enimmäismäärä ennen kyllästymistä. Alapäässä onmelutaso, määräytyy lukumelun ja pimeyteen liittyvien vaikutusten perusteella.
Täyden kaivon kapasiteetin ja efektiivisen kohinapohjan suhde määrittää käytettävän dynaamisen alueen. Kamera, jolla on vähän lukukohinaa, mutta rajoitettu täysi kaivo, voi olla erinomainen hämärätunnistuksessa, kun taas kamera, jolla on suuri täyden kaivon kapasiteetti, voi paremmin tallentaa kohtauksia, joissa on sekä kirkkaita että himmeitä kohtia samanaikaisesti.
Kirkkaan ja hämärän valaistuksen väliset kompromissit
Kameran optimointi äärimmäiselle herkkyydelle usein pienentää maksimilatauskapasiteettia tai lisää vahvistusta, mikä voi supistaa käyttökelpoista dynamiikka-aluetta. Toisaalta laajan dynamiikka-alueen optimointi voi heikentää heikkojen signaalien havaittavuutta.
Tämän seurauksena kuvanlaatu on arvioitava suhteessa odotettuun signaalitilaan. Himmeän fluoresenssin kuvantamiseen suunniteltu järjestelmä priorisoi vähäistä kohinaa. Kirkkaan kentän tarkasteluun tarkoitettu järjestelmä voi priorisoida dynaamista aluetta ja lineaarisuutta.
Bittisyvyys ei ole sama kuin dynaaminen alue
Bittisyvyyden avulla voidaan määrittää, kuinka hienoksi analoginen signaali digitalisoidaan, mutta se ei itsessään luo dynamiikka-aluetta. Jos analogisen kohinan pohja on korkea, bittisyvyyden kasvattaminen vain jakaa kohinaa tarkemmin – se ei laajenna havaittavan signaalin aluetta.
Todellinen dynamiikka-alue määräytyy anturin fysiikan ja kohinan ominaisuuksien, ei pelkästään digitaalisen resoluution, perusteella.
Yhtenäisyys ja kiinteän kuvion artefaktit
Signaalin voimakkuuden ja dynaamisen alueen lisäksi kuvanlaatuun vaikuttaa myös tilan yhtenäisyys. Vaikka kohinatasot olisivat alhaiset, kennon eri osissa esiintyvät rakenteelliset artefaktit voivat vaikuttaa taustan yhtenäisyyteen ja kvantitatiiviseen luotettavuuteen.
Offset- ja vahvistukseen liittyvä epätasaisuus
In CMOS-kamerattietyt epätasaisuudet näkyvät staattisina tai toistuvina kuvioina. Näitä artefakteja kutsutaan usein kiinteäkuvioiseksi kohinaksi (FPN), koska niiden spatiaalinen rakenne ei muutu kuvasta toiseen.
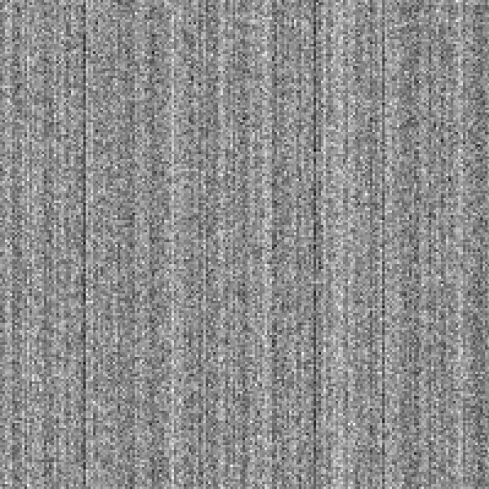
Kuva 1: Kiinteän kuvion sarakkeen kohina
CMOS-analogi-digitaalimuuntimen siirtymäarvojen erot sarakkeesta toiseen johtavat näkyvään kirkkaiden ja tummien sarakkeiden kuvioon, joka ei muutu peräkkäisten ruutujen välillä. Tässä näkyy ilman tulevaa valoa. Tämä kuvio voi olla merkittävä verrattuna kohteen kontrastin kuvaamiseen hämärässä, ja se tulee näkyviin kuvien päällä.
Yksi yleinen lähde on sarakkeisiin liittyvä offset-vaihtelu. Monet CMOS-arkkitehtuurit käyttävät sarakkeiden rinnakkaislukemista, jossa kutakin saraketta käsittelee erillinen analogia-digitaalimuunnin (ADC). Pienet erot ADC-offsettien välillä voivat aiheuttaa näkyvää pystysuoraa juovitusta hämärässä tai esijännitteisessä tilassa. Jaetun anturin malleissa kuvassa voi näkyä myös vaakasuora jako.
Harvemmin riveihin liittyviä kuvioita voi esiintyä, kun rivejä luetaan rinnakkain pienillä poikkeamilla toisistaan. Vaikka nämä kuviot voivat olla hienovaraisia, ihmisen näköjärjestelmä on erityisen herkkä strukturoidulle toistolle, minkä vuoksi ne ovat havaittavampia kuin puhtaasti satunnainen kohina.
Milloin strukturoidut artefaktit vaikuttavat kuvanlaatuun?
Offsetista johtuvat kiinteät kuviot ovat näkyvimpiä matalan signaalin tiloissa, joissa taustalla oleva signaali ei peitä spatiaalista vaihtelua. Vanhemmissa tai heikomman luokan järjestelmissä tällaiset artefaktit voivat tulla näkyviin jo kohtuullisilla signaalitasoilla. Nykyaikaisissa, hyvin kalibroiduissa sCMOS-kameroissa sarake- ja rivikuviot ovat tyypillisesti vaimennettuja lukukohinan alapuolelle, eivätkä ne siksi ole havaittavissa normaaleissa kuvantamisolosuhteissa.
Rakenteiset artefaktit voivat kuitenkin tulla selvemmiksi työnkuluissa, joissa käytetään ruutujen keskiarvoistamista, taustan vähentämistä tai automatisoitua analyysia. Koska tällaiset kuviot ovat systemaattisia, ne eivät keskiarvoistu kuten satunnainen kohina.
Miksi tekniset tiedot eivät välttämättä paljasta strukturoituja malleja
Toisin kuin DSNU, joka kvantifioi siirtymän vaihtelun tilastollisesti, yksi RMS-arvo ei täysin kata strukturoituja kuvioita. Spesifikaatiolomakkeet sisältävät harvoin edustavia hämärässä saatuja vääristymäkuvia, mikä tekee strukturoitujen artefaktien arvioimisen pelkästään numeroiden perusteella vaikeaksi.
Sovelluksissa, joissa yhdenmukaisuus on kriittistä, empiirinen arviointi – erityisesti heikkosignaalisissa tai keskiarvoistetuissa olosuhteissa – voi olla tarpeen sen varmistamiseksi, että spatiaaliset artefaktit eivät vaikuta analyysiin.
Resoluutio ei ole sama kuin kuvanlaatu
Resoluutiota pidetään usein virheellisesti kuvanlaadun ensisijaisena mittarina. Vaikka spatiaalinen resoluutio määrittää, kuinka hienojakoisia yksityiskohtia voidaan näytteistää tai erottaa, se ei takaa merkityksellistä tai tarkkaa dataa.
Suurempi pikselimäärä tai pienempi pikselikoko lisää näytteenottotiheyttä, mutta ne eivät vähennä kohinaa, paranna dynaamista aluetta tai lisää yhdenmukaisuutta. Jos signaali-kohinasuhde on alhainen, resoluution nostaminen voi yksinkertaisesti jakaa kohinan pienempiin pikseleihin parantamatta havaittavuutta. Äärimmäisen hämäräkuvauksessa suuremmat pikselit, joilla on suurempi täyden kaivon kapasiteetti ja vähemmän lukukohinaa, voivat tuottaa paremman kuvanlaadun, vaikka nimellisresoluutio olisi pienempi.
Järjestelmän todellinen resoluutio riippuu myös optiikasta, suurennuksesta ja näytteenotto-olosuhteista – ei pelkästään anturin ominaisuuksista. Kuvantamisjärjestelmän rajoituksena on sen heikoin komponentti.
Tieteellisessä kuvantamisessa resoluutio vaikuttaa kuvanlaatuun, mutta vain tasapainossa kohinanvaimennuksen, dynaamisen alueen ja vakauden kanssa. Useampi pikselimäärä ei yksinään takaa parempaa dataa.
Yhteenveto – kuvanlaadun arviointi
Tieteellisen kuvantamisen kuvanlaadun arviointi vaatii enemmän kuin yhden spesifikaation lukemista. Systemaattinen lähestymistapa auttaa tunnistamaan, mitkä tekijät ovat todella tärkeitä tietyssä sovelluksessa.
1. Määrittele signaalitila.
Määritä, toimiiko järjestelmäsi fotonirajoitteisessa, lukukohinarajoitteisessa vai voimakkaassa signaaliympäristössä. Hallitseva kohinanlähde muuttuu signaalitason mukaan, ja niin muuttuu myös asiaankuuluva suorituskykymittari.
2. Tunnista rajoittava tekijä.
Alhaisilla signaalitasoilla lukukohina ja tummiin sävyihin liittyvät vaikutukset ovat usein hallitsevia. Korkeilla signaalitasoilla dynamiikka-alue, lineaarisuus tai tasaisuus voivat olla tärkeämpiä. Ei-rajoittavan spesifikaation parantaminen harvoin parantaa todellista kuvanlaatua.
3. Arvioi tilan yhtenäisyyttä.
Arvioi, ovatko kiinteän kuvion aiheuttamat artefaktat tai epätasaisuudet merkittäviä suhteessa kohinatasoon. Rakenteelliset vaihtelut voivat vaikuttaa kvantitatiivisiin työnkulkuihin, vaikka kokonaiskohina vaikuttaisi vähäiseltä.
4. Ota huomioon järjestelmän konteksti.
Optiikka, valaistuksen vakaus ja kalibrointistrategia vaikuttavat kaikki lopulliseen kuvanlaatuun. Anturin suorituskykyä ei voida arvioida erillään kuvantamisjärjestelmästä.
Kuvanlaatua ei viime kädessä määritä korkein spesifikaatio, vaan se, kuinka hyvin järjestelmä säilyttää merkityksellisen signaalin todellisissa käyttöolosuhteissa.
Sovellusesimerkkejä
Kuvanlaadun prioriteetit vaihtelevat merkittävästi tieteellisten ja teollisten sovellusten välillä. Hallitsevat rajoittavat tekijät riippuvat signaalitilasta, mittaustavoitteista ja systemaattisen virheen toleranssista.
Fluoresenssimikroskopia
Fluoresenssikuvantamisessa – erityisestiyksittäisen molekyylin fluoresenssikokeissa – signaalitasot voivat lähestyä vain muutamaa elektronia pikseliä kohden. Kuvan laatuun vaikuttavat siksi voimakkaasti lukukohina, tummasävyisyys ja taustan tasaisuus. Rakenteelliset offset-artefaktit tai kuumat pikselit voivat häiritä heikkojen signaalien havaitsemista ja kvantitatiivista intensiteettianalyysiä. Tässä tilassa herkkyys ja alhainen kohinataso painavat tyypillisesti enemmän kuin äärimmäinen dynaaminen alue.
Tarkastusjärjestelmät toimivat usein kohtalaisilla tai korkeilla signaalitasoilla, mutta vaativat erinomaista tasaisuutta ja toistettavuutta. Jopa hienoiset vahvistuksen tai siirtymän vaihtelut voivat vaikuttaa vian havaitsemiskynnyksiin tai taustan vähennystarkkuuteen. Tässä lineaarisuus, dynaaminen alue ja spatiaalinen johdonmukaisuus ovat usein kriittisempiä kuin raaka herkkyys.

Johtopäätös
Tieteellisen kuvantamisen kuvanlaatua ei määritellä yhdellä spesifikaatiolla. Se syntyy signaalitason, kohinalähteiden, dynaamisen alueen, spatiaalisen resoluution ja yhdenmukaisuuden välisestä tasapainosta todellisissa käyttöolosuhteissa. Sama kamera voi toimia eri tavoin riippuen siitä, onko järjestelmä fotonirajoitettu, dynaamisen alueen rajoittama vai spatiaalisten yhdenmukaisuusvaatimusten rajoittama. Merkityksellinen arviointi edellyttää siksi vallitsevan kohinatilanteen ja sovelluksen vaatiman tarkkuuden ymmärtämistä.
At Tucsenkuvanlaatua käsitellään järjestelmätason teknisenä haasteena – ottaen huomioon anturifysiikan, kalibrointistrategian ja sovelluskohtaiset rajoitukset. Jos työnkulkusi vaatii kvantitatiivista luotettavuutta tai äärimmäistä herkkyyttä, tiimimme voi auttaa arvioimaan suorituskykyä todella tärkeässä kontekstissa.
Tucsen Photonics Co., Ltd. Kaikki oikeudet pidätetään. Mainitse lähde lainatessasi:www.tucsen.com








