
 10/10/2023
10/10/2023L'intégration par délai temporel (TDI) est une méthode de capture d'images basée sur le principe du balayage linéaire. Elle consiste à capturer une série d'images unidimensionnelles pour générer une image en synchronisant le mouvement de l'échantillon et la capture de tranches d'image par déclenchement. Bien que cette technologie existe depuis des décennies, elle a généralement été associée à des applications à faible sensibilité, telles que l'inspection de bandes.
Une nouvelle génération de caméras combine la sensibilité du sCMOS à la rapidité du TDI pour offrir une acquisition d'images d'une qualité équivalente à celle du balayage matriciel, mais avec un débit potentiellement considérablement plus rapide. Ceci est particulièrement évident pour l'imagerie de grands échantillons en conditions de faible luminosité. Dans cette note technique, nous expliquons le fonctionnement du balayage TDI et comparons le temps d'acquisition d'image à celui d'une technique de balayage matriciel comparable : l'imagerie par assemblage de tuiles.
Du balayage linéaire au TDI
L'imagerie par balayage linéaire est une technique qui utilise une seule ligne de pixels (appelée colonne ou platine) pour capturer une tranche d'image pendant le déplacement d'un échantillon. Grâce à un système de déclenchement électrique, une seule tranche d'image est acquise au passage de l'échantillon devant le capteur. En ajustant la fréquence de déclenchement de la caméra pour synchroniser la capture avec le mouvement de l'échantillon et en utilisant une carte d'acquisition vidéo pour capturer ces images, celles-ci peuvent être assemblées pour reconstruire l'image.
L'imagerie TDI repose sur le principe de la capture d'images d'un échantillon, mais utilise plusieurs étages pour augmenter le nombre de photoélectrons capturés. À chaque étage, l'échantillon collecte davantage d'informations qui s'ajoutent à celles déjà capturées par les étages précédents et sont réorganisées selon un processus similaire à celui des dispositifs CCD. Lorsque l'échantillon franchit le dernier étage, les photoélectrons collectés sont envoyés à un système de lecture, et le signal intégré sur toute la distance est utilisé pour générer une coupe d'image. La figure 1 illustre la capture d'images sur un dispositif à cinq colonnes (étages) TDI.
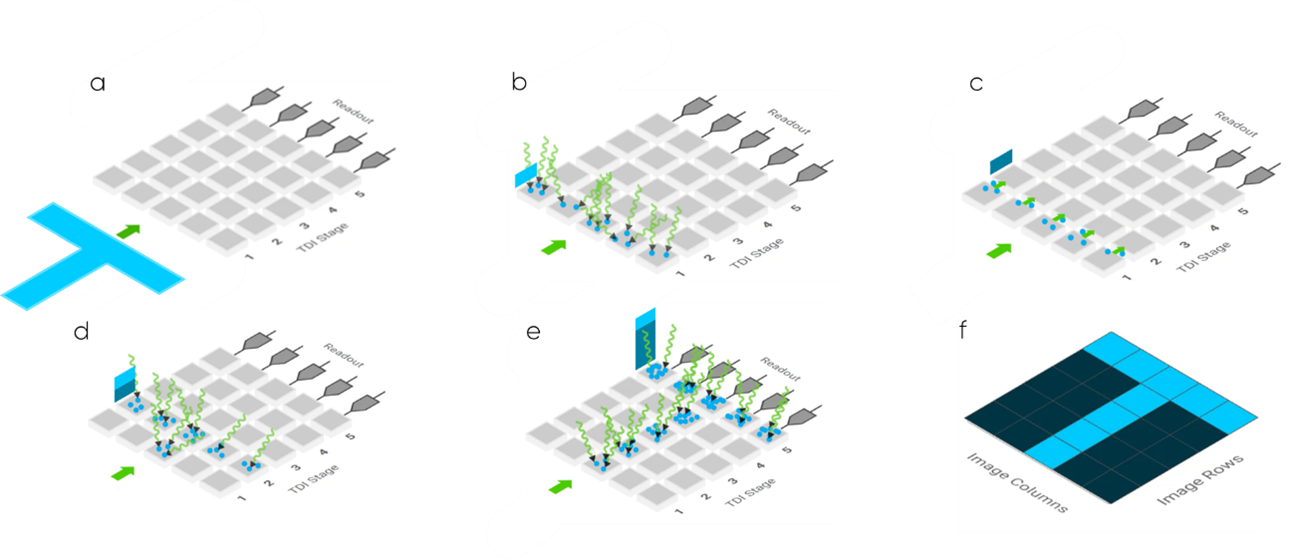
Figure 1 : Exemple animé de capture d’image par technologie TDI. Un échantillon (T bleu) est déplacé vers un dispositif de capture d’image TDI (une colonne de 5 pixels, 5 étages TDI). Les photoélectrons sont capturés à chaque étage et additionnés au niveau du signal. Un lecteur convertit ce signal en une image numérique.
1a : L'image (un T bleu) est introduite sur scène ; le T est en mouvement comme indiqué sur l'appareil.
1b : Lorsque le transistor T franchit le premier étage, la caméra TDI est déclenchée pour recevoir les photoélectrons, lesquels sont capturés par les pixels lorsqu’ils atteignent le premier étage du capteur TDI. Chaque colonne comporte une série de pixels qui capturent individuellement les photoélectrons.
1c : Ces photoélectrons capturés sont transférés au deuxième étage, où chaque colonne pousse son niveau de signal vers l'étage suivant.
1d : Au fur et à mesure que l’échantillon se déplace d’un pixel, un second ensemble de photoélectrons est capturé à l’étape 2 et ajouté aux précédents, augmentant ainsi le signal. À l’étape 1, un nouvel ensemble de photoélectrons est capturé, correspondant à la tranche d’image suivante.
1e : Les processus de capture d’image décrits à l’étape 1d sont répétés lors du passage de l’image devant le capteur. Ceci génère un signal à partir des photoélectrons émis par les différents étages. Ce signal est ensuite transmis à un dispositif de lecture qui le convertit en une valeur numérique.
1f : L’affichage numérique se présente sous forme d’image colonne par colonne. Ceci permet la reconstruction numérique d’une image.
Le dispositif TDI étant capable de transmettre simultanément des photoélectrons d'un étage à l'autre et de capturer de nouveaux photoélectrons provenant du premier étage pendant que l'échantillon est en mouvement, le nombre de lignes capturées par l'image peut être pratiquement infini. Les fréquences de déclenchement, qui déterminent le nombre d'acquisitions d'image (fig. 1a), peuvent atteindre plusieurs centaines de kHz.
Dans l'exemple de la figure 2, une lame de microscope de 29 x 17 mm a été capturée en 10,1 secondes à l'aide d'une caméra TDI à pixels de 5 µm. Même à des niveaux de zoom importants, le flou reste minimal. Ceci représente un progrès considérable par rapport aux générations précédentes de cette technologie.
Pour plus de détails, le tableau 1 présente un temps d'imagerie représentatif pour une série de tailles d'échantillons courantes à un zoom de 10, 20 et 40 x.
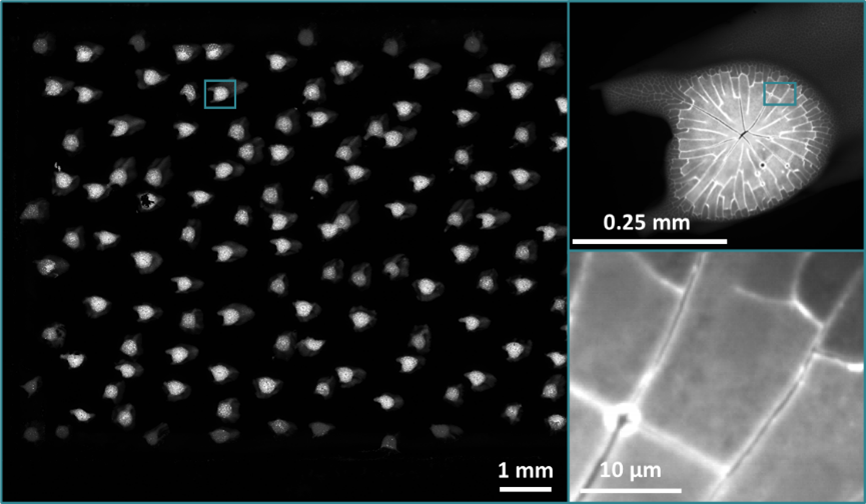
Figure 2 : Image d’un échantillon fluorescent acquise à l’aide d’un Tucsen 9kTDI. Temps d’exposition : 10 ms, temps d’acquisition : 10,1 s.
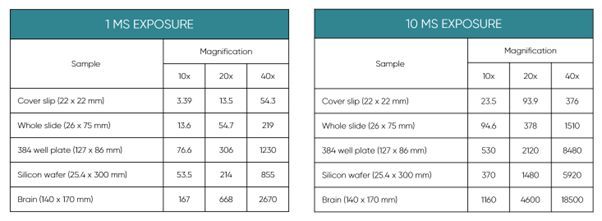
Tableau 1 : Matrice du temps de capture de tailles d'échantillon variables (secondes) à l'aide d'une caméra Tucsen 9kTDI sur une platine motorisée de la série Zaber MVR à 10, 20 et 40 x pour un temps d'exposition de 1 et 10 ms.
Imagerie par balayage de zone
L'imagerie par balayage de surface dans les caméras sCMOS consiste à capturer une image complète simultanément à l'aide d'une matrice bidimensionnelle de pixels. Chaque pixel capte la lumière, la convertissant en signaux électriques pour un traitement immédiat et formant une image complète avec une haute résolution et une grande rapidité. La taille d'une image pouvant être capturée en une seule exposition est déterminée par la taille des pixels, le grossissement et le nombre de pixels dans la matrice, par (1)

Pour un tableau standard, le champ de vision est donné par (2)

Lorsque l'échantillon est trop grand pour le champ de vision d'une caméra, une image peut être reconstruite en la divisant en une grille d'images de la taille du champ de vision. La capture de ces images suit un processus précis : la platine se déplace jusqu'à une position sur la grille, se stabilise, puis l'image est capturée. Dans les caméras à obturateur roulant, un temps d'attente supplémentaire est nécessaire pendant la rotation de l'obturateur. Ces images peuvent être obtenues en déplaçant la caméra et en les assemblant. La figure 3 montre une grande image d'une cellule humaine observée au microscope à fluorescence, formée par l'assemblage de 16 images plus petites.
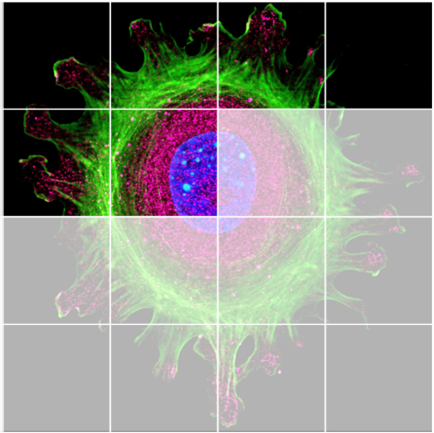
Figure 3 : Une lame d'une cellule humaine capturée par une caméra à balayage de zone utilisant l'imagerie par mosaïque et assemblage.
En général, pour obtenir des détails plus précis, il faudra générer et assembler davantage d'images. Une solution consiste à utilisernumérisation par caméra grand format, qui possède de grands capteurs à haute résolution, associés à une optique spécialisée, permettant de capturer une plus grande quantité de détails.
Comparaison entre la numérisation TDI et la numérisation de zone (Tuile et assemblage)
Pour la numérisation de grandes surfaces d'échantillons, les techniques Tile & Stitch et TDI conviennent toutes deux. Cependant, en choisissant la méthode la plus adaptée, il est possible de réduire considérablement le temps de numérisation. Ce gain de temps est dû à la capacité de la technique TDI à capturer un échantillon en mouvement, éliminant ainsi les délais liés à la stabilisation de la platine et au déclenchement de l'obturateur roulant, contrairement à la technique Tile & Stitch.
La figure 4 compare les arrêts (en vert) et les déplacements (en noir) nécessaires à l'acquisition d'une image d'une cellule humaine, en imagerie par mosaïque (à gauche) et en imagerie TDI (à droite). L'absence d'arrêt et de réalignement de l'image en imagerie TDI permet de réduire considérablement le temps d'acquisition, à condition que le temps d'exposition soit faible (< 100 ms).
Le tableau 2 présente un exemple pratique de balayage entre une caméra TDI 9k et une caméra sCMOS standard.
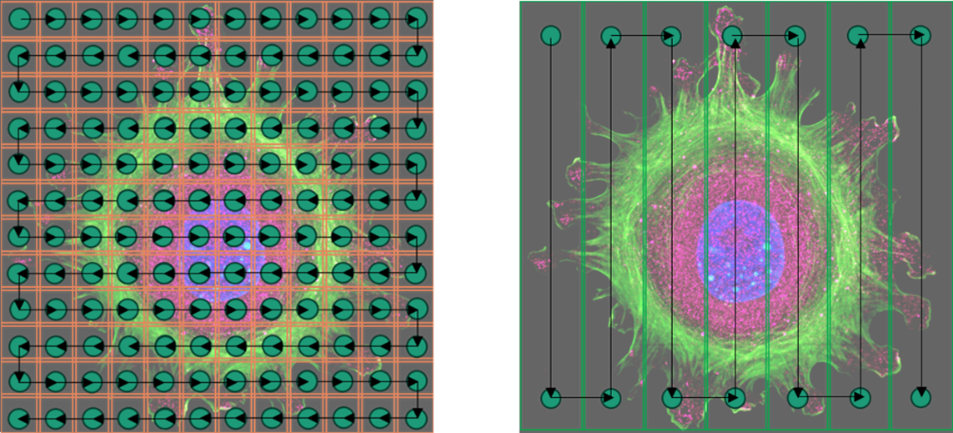
Figure 4 : Un motif de balayage de la capture d'une cellule humaine sous fluorescence montrant la mosaïque et le point de jonction (à gauche) et l'imagerie TDI (à droite).
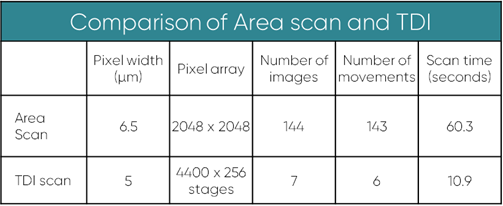
Tableau 2 : Comparaison de l'imagerie par balayage de zone et de l'imagerie TDI pour un échantillon de 15 x 15 mm avec un objectif 10x et un temps d'exposition de 10 ms.
Bien que la technologie TDI offre un potentiel exceptionnel pour une acquisition d'images plus rapide, son utilisation présente certaines subtilités. Pour les temps d'exposition élevés (> 100 ms), l'importance du temps perdu lors des phases de déplacement et de stabilisation du balayage matriciel diminue par rapport au temps d'exposition. Dans ce cas, les caméras à balayage matriciel peuvent offrir des temps de balayage plus courts que l'imagerie TDI. Pour déterminer si la technologie TDI peut vous apporter des avantages par rapport à votre configuration actuelle,Contactez-nouspour un calculateur de comparaison.
Autres applications
De nombreuses questions de recherche nécessitent plus d'informations qu'une seule image, comme l'acquisition d'images multicanaux ou multifocales.
L'imagerie multicanaux dans une caméra matricielle consiste à capturer des images simultanément à l'aide de plusieurs longueurs d'onde. Ces canaux correspondent généralement à différentes longueurs d'onde de la lumière, telles que le rouge, le vert et le bleu. Chaque canal capture une longueur d'onde ou une information spectrale spécifique de la scène. La caméra combine ensuite ces canaux pour générer une image en couleur ou multispectrale, offrant une vue plus complète de la scène avec des détails spectraux distincts. Dans les caméras matricielles, cela est réalisé par des expositions discrètes. Cependant, avec l'imagerie TDI, un séparateur peut être utilisé pour diviser le capteur en plusieurs parties. Diviser un capteur 9kTDI (45 mm) en 3 capteurs de 15,0 mm donnera un capteur plus grand qu'un capteur standard (largeur de pixel de 6,5 µm, 2048 pixels) de 13,3 mm de large. De plus, comme la technologie TDI ne nécessite d'éclairer que la partie de l'échantillon imagée, les cycles de balayage peuvent être effectués plus rapidement.
Un autre domaine où cela peut se produire est l'imagerie multifocale. L'imagerie multifocale dans les caméras à balayage matriciel consiste à capturer plusieurs images à différentes distances de mise au point et à les fusionner pour créer une image composite où toute la scène est nette. Elle prend en compte les variations de distance dans une scène en analysant et en combinant les zones nettes de chaque image, ce qui permet d'obtenir une représentation plus détaillée de l'image. Là encore, en utilisant unséparateurEn divisant le capteur TDI en deux (22,5 mm) ou trois (15,0 mm) parties, il est possible d'acquérir une image multifocale plus rapidement qu'avec un balayage de zone équivalent. Cependant, pour les acquisitions multifocales d'ordre supérieur (empilements z de 6 ou plus), le balayage de zone reste généralement la technique d'imagerie la plus rapide.
Conclusions
Cette note technique décrit les différences entre le balayage de surface et la technologie TDI pour le balayage de grandes surfaces. En combinant le balayage linéaire et la sensibilité sCMOS, la technologie TDI permet d'obtenir une imagerie rapide et de haute qualité sans interruption, surpassant ainsi les méthodes de balayage de surface traditionnelles telles que l'assemblage d'images. Évaluez les avantages de l'utilisation de notre calculateur en ligne, en tenant compte des différentes hypothèses présentées dans ce document. La technologie TDI constitue un outil puissant pour une imagerie efficace, offrant un potentiel considérable de réduction des temps d'acquisition, tant pour les techniques d'imagerie standard que pour les techniques avancées.Si vous souhaitez savoir si une caméra TDI ou une caméra à balayage matriciel pourrait convenir à votre application et améliorer votre temps de capture, contactez-nous dès aujourd'hui.








