
 09/03/2026
09/03/2026On parle souvent de la qualité d'image comme d'une simple spécification : résolution plus élevée, bruit plus faible ou plage dynamique plus étendue. En imagerie scientifique, cependant, la qualité d'image ne se définit pas par un seul paramètre. Elle résulte de l'interaction entre le signal, le bruit, la plage dynamique, l'échantillonnage spatial et l'uniformité dans des conditions de fonctionnement spécifiques.
Une caméra produisant des images visuellement agréables peut néanmoins présenter des lacunes dans les flux de travail quantitatifs si l'uniformité du fond se dégrade ou si un bruit de fond trop important limite la détection. Inversement, un système optimisé pour une sensibilité élevée peut sacrifier la plage dynamique ou la précision spatiale.
Pour comprendre ce qui détermine réellement la qualité d'image, il est nécessaire d'adopter une approche systémique. Ce guide détaille les facteurs physiques qui influencent la qualité d'image des caméras CMOS scientifiques et explique comment les évaluer en fonction de votre application.
La qualité de l'image dépend de la tâche.
La qualité d'image ne peut être définie indépendamment de la tâche d'imagerie. Une même caméra peut être considérée comme excellente dans une application et insuffisante dans une autre, selon le niveau du signal, les objectifs de mesure et les marges d'erreur acceptables. La qualité d'image n'est donc pas une spécification absolue ; elle dépend des performances du système dans des conditions d'utilisation spécifiques.
Imagerie grand public vs imagerie scientifique
En photographie grand public, les scènes sont généralement bien éclairées et axées sur le visuel. Dans ces conditions, la qualité perçue dépend principalement des performances de l'objectif, de la résolution spatiale et du rendu des couleurs. Les artefacts mineurs à motif fixe ou les faibles variations de décalage sont généralement masqués par un signal fort et un contraste visuel élevé.
L'imagerie scientifique fonctionne sous différentes contraintes. Dans des environnements à faible luminosité — comme en microscopie de fluorescence, en astronomie ou lors d'expériences à flux photonique limité — le signal peut se réduire à quelques électrons par pixel. Dans ces conditions, des sources de bruit subtiles, des variations de décalage, des pixels chauds, des halos ou des artefacts structurés peuvent devenir visibles et affecter la fiabilité des mesures. La caméra n'est plus seulement jugée sur son aspect visuel, mais aussi sur sa capacité à préserver l'intégrité du signal.
À quel moment les limitations de la qualité d'image deviennent-elles importantes ?
Les exigences en matière de qualité d'image varient selon les applications. L'inspection à grande gamme dynamique peut privilégier la linéarité et l'uniformité. La détection en faible luminosité peut privilégier le faible bruit de lecture et la stabilité dans l'obscurité. L'imagerie quantitative peut exiger à la fois précision et répétabilité dans le temps.
Une approximation pratique, valable pour de nombreuses applications, est la suivante : les limitations de la qualité d’image deviennent significatives lorsque les artefacts systématiques ou les non-uniformités sont comparables, voire supérieurs, au bruit inhérent au signal. Lorsque ces effets restent nettement inférieurs au seuil de bruit, leur impact pratique est minime.
En résumé, la qualité d'image est définie par le régime de fonctionnement et la précision exigée par l'application, et non par une simple spécification technique.
Signal et bruit — Les fondements de la qualité d'image
En imagerie scientifique, la qualité d'image repose fondamentalement sur le rapport signal/bruit. Aussi performant soit un capteur, sa capacité à extraire des informations pertinentes dépend de la netteté avec laquelle le signal se distingue du bruit de fond.
Niveau du signal et photoélectrons
In Caméras sCMOSLa formation d'une image commence par la génération de photoélectrons par les photons dans chaque pixel. Le nombre d'électrons collectés définit le signal physique réel. Les valeurs de gris numériques (ADU) ne sont qu'une représentation de cette charge après amplification et numérisation. Étant donné que les réglages de gain peuvent modifier la correspondance entre les électrons et les niveaux de gris, la luminosité visuelle seule ne définit pas la qualité de l'image ; c'est le nombre d'électrons sous-jacent qui compte.
Le régime du signal est important. À des niveaux de signal élevés, le bruit de grenaille photonique est prédominant. À des niveaux de signal faibles, les sources de bruit électronique, telles que le bruit de lecture et les effets liés à l'obscurité, deviennent plus importantes.
Sources de bruit dans les caméras CMOS scientifiques
Plusieurs composantes du bruit contribuent à la dégradation de l'image :
● Bruit de grenaille photonique, qui varie en fonction de la racine carrée du signal
● Bruit de lecture, introduit lors de la conversion charge-tension et de la numérisation
● Variantes liées à l'obscurité, y comprisDSNU(variation de décalage)
● Variations liées au gain, telles quePRNU
Chaque source réagit différemment selon le niveau du signal. Certaines varient en fonction de la luminosité ; d’autres restent fixes. Comprendre quelle composante est prédominante dans des conditions de fonctionnement données est essentiel pour évaluer la qualité d’image de manière réaliste.
Le rapport signal/bruit (SNR) comme mesure principale
Le rapport signal/bruit (RSB) offre une méthode unifiée pour évaluer la qualité d'une image. Plutôt que de se concentrer sur des spécifications individuelles, le RSB évalue si le signal d'intérêt est discernable du bruit total.
En conditions de forte luminosité, le rapport signal/bruit (SNR) est souvent limité par les statistiques des photons. En faible luminosité, il peut être limité par le bruit de lecture ou par des non-uniformités liées à l'obscurité. Par conséquent, améliorer la qualité d'image ne consiste pas simplement à abaisser une seule spécification ; il est nécessaire d'identifier la source de bruit qui limite les performances dans le régime de signal souhaité.
En définitive, la qualité d'image s'améliore lorsque le signal augmente par rapport à la principale source de bruit. Identifier cette source dominante est la première étape de l'optimisation au niveau du système.
Reproduction de la plage dynamique et du contraste
La plage dynamique décrit l'étendue entre le plus petit signal détectable et le plus grand signal qu'un capteur peut enregistrer avant saturation. Elle définit la variation de contraste qu'un système d'imagerie peut capturer en une seule exposition.
Capacité maximale du puits et niveau sonore
À l'extrémité supérieure de la plage dynamique se trouve le capteurpleine capacité du puits— le nombre maximal d'électrons qu'un pixel peut stocker avant saturation. À l'extrémité inférieure se trouve leplancher de bruit, déterminé par le bruit de lecture et les contributions liées à l'obscurité.
Le rapport entre la capacité maximale du puits de potentiel et le bruit de fond effectif définit la plage dynamique utilisable. Une caméra à faible bruit de lecture mais à capacité maximale limitée peut exceller en faible luminosité, tandis qu'une caméra à capacité maximale élevée peut mieux capturer des scènes comportant simultanément des zones claires et sombres.
Compromis entre haute et basse luminosité
L'optimisation d'une caméra pour une sensibilité extrême réduit souvent sa capacité de charge maximale ou augmente son gain, ce qui peut comprimer la plage dynamique utilisable. À l'inverse, l'optimisation pour une large plage dynamique peut nuire à la détection des signaux faibles.
Par conséquent, la qualité d'image doit être évaluée en fonction du régime de signal attendu. Un système conçu pour l'imagerie par fluorescence en faible luminosité privilégie un faible bruit. Un système destiné à l'inspection en fond clair peut privilégier la plage dynamique et la linéarité.
La profondeur de bits n'est pas égale à la plage dynamique.
La profondeur de bits définit la finesse de la numérisation du signal analogique, mais elle ne crée pas de plage dynamique à elle seule. Si le bruit de fond analogique est élevé, augmenter la profondeur de bits ne fait que subdiviser le bruit avec plus de précision ; cela n’étend pas la plage de signal détectable.
La plage dynamique réelle est déterminée par la physique du capteur et les caractéristiques de bruit, et non par la seule résolution numérique.
Artefacts d'uniformité et de motif fixe
Outre la puissance du signal et la plage dynamique, la qualité d'image est également influencée par l'uniformité spatiale. Même lorsque le niveau de bruit est faible, les artefacts structurés présents sur le capteur peuvent affecter la cohérence du fond et la fiabilité quantitative.
Non-uniformité liée au décalage et au gain
In Caméras CMOSCertaines non-uniformités apparaissent sous forme de motifs statiques ou répétitifs. Ces artefacts sont souvent appelés bruit de motif fixe (FPN) car leur structure spatiale ne change pas d'une image à l'autre.
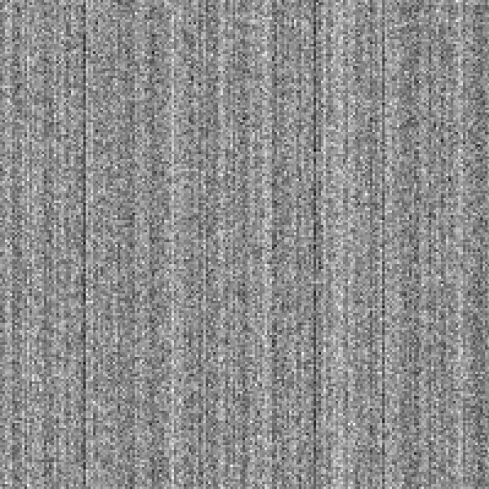
Figure 1 : Bruit de colonne à motif fixe
Les différences de valeur de décalage du convertisseur analogique-numérique CMOS d'une colonne à l'autre se traduisent par une alternance de colonnes claires et sombres, constante d'une image à l'autre. Ce phénomène est visible ici en l'absence de lumière incidente. En conditions de faible luminosité, cette alternance peut être significative par rapport au contraste du sujet et devenir visible sur plusieurs images.
Une source fréquente de ces variations est la variation de décalage liée aux colonnes. De nombreuses architectures CMOS utilisent une lecture parallèle par colonne, où chaque colonne est traitée par un convertisseur analogique-numérique (CAN) dédié. De faibles différences entre les décalages des CAN peuvent créer des bandes verticales visibles en faible luminosité ou en cas de polarisation. Dans les conceptions à capteur divisé, une division horizontale de l'image peut également apparaître.
Plus rarement, des motifs liés aux lignes peuvent apparaître lors de la lecture parallèle de lignes avec de légers décalages. Bien que ces motifs puissent être subtils, le système visuel humain est particulièrement sensible à la répétition structurée, ce qui les rend plus perceptibles qu'un bruit purement aléatoire.
Quand les artefacts structurés affectent-ils la qualité de l'image ?
Les motifs fixes liés au décalage sont plus visibles en régime de faible signal, lorsque le signal sous-jacent ne masque pas les variations spatiales. Sur les systèmes plus anciens ou de moindre qualité, ces artefacts peuvent apparaître même à des niveaux de signal modérés. Sur les caméras sCMOS modernes et bien calibrées, les motifs de colonnes et de lignes sont généralement réduits à des niveaux inférieurs au bruit de lecture et sont donc imperceptibles dans des conditions d'imagerie standard.
Cependant, les artefacts structurés peuvent devenir plus apparents dans les flux de travail impliquant le moyennage d'images, la soustraction d'arrière-plan ou l'analyse automatisée. Comme ces motifs sont systématiques, ils ne disparaissent pas par moyennage comme le bruit aléatoire.
Pourquoi les spécifications peuvent ne pas révéler de modèles structurés
Contrairement à la méthode DSNU, qui quantifie statistiquement la variation du décalage, les motifs structurés ne sont pas entièrement capturés par une seule valeur RMS. Les fiches techniques incluent rarement des images représentatives du biais en faible luminosité, ce qui rend difficile l'évaluation des artefacts structurés à partir de simples valeurs numériques.
Dans les applications où l'uniformité est essentielle, une évaluation empirique — en particulier dans des conditions de faible signal ou de moyenne — peut être nécessaire pour confirmer que les artefacts spatiaux n'influencent pas l'analyse.
La résolution n'est pas synonyme de qualité d'image.
On confond souvent la résolution avec le principal indicateur de la qualité d'une image. Si la résolution spatiale définit la finesse avec laquelle les détails peuvent être échantillonnés ou distingués, elle ne garantit pas pour autant des données pertinentes ou exactes.
Un nombre de pixels plus élevé ou une taille de pixel plus petite augmentent la densité d'échantillonnage, mais ne réduisent pas le bruit, n'améliorent pas la plage dynamique ni l'uniformité. Si le rapport signal/bruit est faible, l'augmentation de la résolution peut simplement répartir le bruit sur des pixels plus petits sans améliorer la détectabilité. En imagerie en conditions de très faible luminosité, des pixels plus grands, avec une capacité de puits de potentiel plus élevée et un bruit de lecture plus faible, peuvent produire une meilleure qualité d'image globale, même si la résolution nominale est inférieure.
La résolution réelle du système dépend également de l'optique, du grossissement et des conditions d'échantillonnage, et pas seulement des spécifications du capteur. Un système d'imagerie est limité par son composant le plus faible.
En imagerie scientifique, la résolution contribue à la qualité de l'image, mais seulement en tenant compte du rapport signal/bruit, de la plage dynamique et de la stabilité. Un plus grand nombre de pixels ne garantit pas à lui seul de meilleures données.
Synthèse — Comment évaluer la qualité d'une image
L'évaluation de la qualité d'image en imagerie scientifique ne se limite pas à la lecture d'une simple spécification. Une approche systématique permet d'identifier les facteurs réellement importants pour une application donnée.
1. Définir le régime de signalisation.
Déterminez si votre système fonctionne dans un environnement limité par le nombre de photons, par le bruit de lecture ou par un signal élevé. La principale source de bruit varie en fonction du niveau du signal, tout comme la métrique de performance correspondante.
2. Identifier le facteur limitant.
À faible niveau de signal, le bruit de lecture et les effets liés à l'obscurité sont souvent prédominants. À niveau de signal élevé, la plage dynamique, la linéarité ou l'uniformité peuvent devenir plus importantes. Améliorer une spécification non limitante améliore rarement la qualité d'image réelle.
3. Évaluer la cohérence spatiale.
Évaluez si les artefacts ou les non-uniformités liés à des motifs fixes sont significatifs par rapport au bruit de fond. Les variations structurées peuvent affecter les flux de travail quantitatifs même lorsque le bruit global semble faible.
4. Tenir compte du contexte du système.
L'optique, la stabilité de l'éclairage et la stratégie d'étalonnage influencent toutes la qualité finale de l'image. Les performances du capteur ne peuvent être évaluées indépendamment du système d'imagerie.
En définitive, la qualité d'image n'est pas définie par les spécifications les plus élevées, mais par la capacité du système à préserver un signal exploitable dans des conditions réelles d'utilisation.
Exemples d'application
Les priorités en matière de qualité d'image varient considérablement selon les applications scientifiques et industrielles. Les principaux facteurs limitants dépendent du régime du signal, des objectifs de mesure et de la tolérance aux erreurs systématiques.
Microscopie à fluorescence
En imagerie par fluorescence, en particulier enfluorescence de molécule uniqueLors d'expériences, les niveaux de signal peuvent atteindre seulement quelques électrons par pixel. La qualité d'image est donc fortement influencée par le bruit de lecture, la stabilité en obscurité et l'uniformité du fond. Des artefacts de décalage structurés ou des pixels chauds peuvent perturber la détection des signaux faibles et l'analyse quantitative de l'intensité. Dans ce régime, la sensibilité et la faible sensibilité au bruit priment généralement sur une plage dynamique extrême.
Inspection des semi-conducteurs
Les systèmes d'inspection fonctionnent généralement à des niveaux de signal moyens à élevés, mais exigent une excellente uniformité et répétabilité. Même de légères variations de gain ou de décalage peuvent influencer les seuils de détection des défauts ou la précision de la soustraction du bruit de fond. Dans ce contexte, la linéarité, la plage dynamique et la cohérence spatiale sont souvent plus importantes que la sensibilité brute.

Conclusion
La qualité d'image en imagerie scientifique ne se résume pas à une seule spécification. Elle résulte d'un équilibre entre le niveau du signal, les sources de bruit, la plage dynamique, la résolution spatiale et l'uniformité en conditions réelles d'utilisation. Une même caméra peut présenter des performances différentes selon que le système est limité par le nombre de photons, par la plage dynamique ou par des exigences de cohérence spatiale. Une évaluation pertinente nécessite donc de comprendre le régime de bruit dominant et la précision requise par l'application.
At TucsenLa qualité d'image est abordée comme un défi d'ingénierie système, prenant en compte la physique du capteur, la stratégie d'étalonnage et les contraintes spécifiques à l'application. Si votre flux de travail exige une fiabilité quantitative ou une sensibilité extrême, notre équipe peut vous aider à évaluer les performances dans le contexte qui compte vraiment.
Tucsen Photonics Co., Ltd. Tous droits réservés. Veuillez citer la source :www.tucsen.com








