
 2026/03/09
2026/03/09איכות תמונה נדונה לעתים קרובות כאילו הייתה מפרט יחיד - רזולוציה גבוהה יותר, רעש נמוך יותר או טווח דינמי גדול יותר. עם זאת, בהדמיה מדעית, איכות תמונה אינה מוגדרת על ידי אף פרמטר אחד. היא תוצאה של האופן שבו אות, רעש, טווח דינמי, דגימה מרחבית ואחידות פועלים יחד תחת תנאי פעולה ספציפיים.
מצלמה שמפיקה תמונות נעימות מבחינה ויזואלית עדיין עלולה להיכשל בתהליכי עבודה כמותיים אם אחידות הרקע משתנה או רעש אות נמוך מגביל את יכולת הזיהוי. לעומת זאת, מערכת המותאמת לרגישות גבוהה עלולה להקריב את הטווח הדינמי או את הדיוק המרחבי.
הבנת מה באמת קובע את איכות התמונה דורשת פרספקטיבה ברמת המערכת. מדריך זה מפרט את הגורמים הפיזיים המעצבים את איכות התמונה במצלמות CMOS מדעיות - ומסביר כיצד להעריך אותם בהתבסס על היישום שלך.
איכות התמונה תלויה במשימה
לא ניתן להגדיר איכות תמונה באופן עצמאי ממשימת ההדמיה. אותה מצלמה עשויה להיחשב מצוינת ביישום אחד ולא מספקת ביישום אחר, בהתאם לרמת האות, יעדי המדידה ושולי השגיאה המקובלים. לכן, איכות התמונה אינה מפרט מוחלט - היא נקבעת על ידי אופן ביצועי המערכת בתנאי הפעלה ספציפיים.
הדמיה צרכנית לעומת הדמיה מדעית
בצילום צרכני, סצנות בדרך כלל מוארות היטב ומונעות ויזואלית. בתנאים כאלה, ביצועי העדשה, הרזולוציה המרחבית ועיבוד הצבעים שולטים באיכות הנתפסת. תופעות לוואי קטנות של דפוס קבוע או שינויים קטנים בהיסט בדרך כלל מוסתרות על ידי רמות אות חזקות וניגודיות חזותית.
הדמיה מדעית פועלת תחת אילוצים שונים. בסביבות תאורה חלשה - כגון מיקרוסקופ פלואורסצנטי, אסטרונומיה או ניסויים מוגבלי פוטונים - האות עשוי להתקרב למספר אלקטרונים בודדים בלבד לפיקסל. במשטרים אלה, מקורות רעש עדינים, שינויי היסט, פיקסלים חמים, זוהר או חפצים מובנים יכולים להפוך לגלויים ולהשפיע על אמינות המדידה. המצלמה אינה נשפטת עוד על פי מראה חיצוני בלבד, אלא על פי יכולתה לשמור על שלמות האות.
מתי מגבלות איכות התמונה הופכות למשמעותיות?
יישומים שונים נתקלים באתגרים שונים באיכות תמונה. בדיקה בטווח דינמי גבוה עשויה לתת עדיפות לליניאריות ואחידות. זיהוי בתאורה חלשה עשוי לתת עדיפות לרעש קריאה וליציבות בחושך. דימות כמותי עשוי לדרוש גם דיוק וגם חזרתיות לאורך זמן.
קירוב מעשי החל על כל יישומים הוא זה: מגבלות איכות התמונה הופכות משמעותיות כאשר תופעות שיטתיות או אי-אחידות דומות לרעש הטבוע באות עצמו, או גדולות ממנו. כאשר השפעות כאלה נשארות הרבה מתחת לרצפת הרעש, השפעתן המעשית מינימלית.
בקיצור, איכות התמונה מוגדרת על ידי משטר ההפעלה והדיוק הנדרש על ידי היישום - לא על ידי מפרט כותרת יחיד.
אות ורעש - יסודות איכות התמונה
בליבתה, איכות התמונה בהדמיה מדעית נקבעת על ידי הקשר בין אות לרעש. לא משנה כמה מתקדם החיישן, היכולת לחלץ מידע משמעותי תלויה במידת הברירות של האות מעל רצפת הרעש הבסיסית.
רמת אות ופוטואלקטרונים
In מצלמות sCMOS, יצירת תמונה מתחילה בפוטונים המייצרים פוטואלקטרונים בכל פיקסל. מספר האלקטרונים שנאספו מגדיר את האות הפיזי האמיתי. ערכי אפור דיגיטליים (ADU) הם פשוט ייצוג של מטען זה לאחר הגברה ודיגיטציה. מכיוון שהגדרות הגבר יכולות לשנות את המיפוי בין אלקטרונים לרמות אפור, בהירות חזותית לבדה אינה מגדירה את איכות התמונה - ספירת האלקטרונים הבסיסית כן.
משטר האותות משנה משמעות. ברמות אות גבוהות, רעש ירי הפוטון שולט. ברמות אות נמוכות, מקורות רעש אלקטרוני - כגון רעש קריאה ואפקטים הקשורים לחושך - הופכים משמעותיים יותר.
מקורות רעש במצלמות CMOS מדעיות
רכיבי רעש מרובים תורמים לפגיעה בתמונה:
● רעש ירי פוטון, אשר משתנה בהתאם לשורש הריבועי של האות
● רעש קריאת רכיבים, שנוצר במהלך המרת מטען למתח ודיגיטציה
● וריאציות הקשורות לחושך, כוללDSNU(וריאציה של קיזוז)
● שינויים הקשורים לרווח, כגוןPRNU
כל מקור מתנהג בצורה שונה ברמות האות השונות. חלקם משתנים בהתאם לבהירות; אחרים נשארים קבועים. הבנת איזה רכיב שולט בתנאי פעולה נתונים חיונית להערכת איכות התמונה בצורה ריאליסטית.
יחס אות לרעש (SNR) כמדד עיקרי
יחס אות לרעש (SNR) מספק דרך מאחדת להערכת איכות תמונה. במקום להתמקד במפרטים בודדים, SNR מעריך האם האות הרצוי ניתן להבחנה מתרומות הרעש הכוללות.
בתנאי תאורה חזקה, יחס אות לרעש (SNR) מוגבל לעיתים קרובות על ידי סטטיסטיקות פוטונים. במשטרי תאורה חלשה, יחס אות לרעש (SNR) עשוי להיות מוגבל על ידי רעש קריאה או אי-אחידות הקשורה לחושך. כתוצאה מכך, שיפור איכות התמונה אינו נובע רק מירידה במפרט אחד - הוא דורש זיהוי איזה מקור רעש מגביל את הביצועים במשטר האות המיועד.
בסופו של דבר, איכות התמונה משתפרת כאשר האות עולה ביחס למקור הרעש הדומיננטי. זיהוי מקור זה הוא הצעד הראשון באופטימיזציה ברמת המערכת.
טווח דינמי ושחזור ניגודיות
טווח דינמי מתאר את הטווח שבין האות הקטן ביותר שניתן לזיהוי לבין האות הגדול ביותר שחיישן יכול להקליט לפני רוויה. הוא מגדיר כמה וריאציה בניגודיות מערכת הדמיה יכולה ללכוד בחשיפה אחת.
קיבולת מלאה של הבאר ורצפת הרעש
בקצה העליון של הטווח הדינמי נמצא החיישןקיבולת מלאה של הבאר—המספר המקסימלי של אלקטרונים שפיקסל יכול לאחסן לפני רוויה. בקצה התחתון נמצא הרצפת רעש, נקבע על ידי רעש קריאה ותרומות הקשורות לחושך.
היחס בין קיבולת האור המלאה לבין רצפת הרעש האפקטיבית מגדיר את טווח הדינמיקה השמיש. מצלמה עם רעש קריאה נמוך אך אור מלא מוגבל עשויה להצטיין בזיהוי תאורה חלשה, בעוד שמצלמה עם קיבולת אור מלאה גבוהה עשויה ללכוד טוב יותר סצנות המכילות מאפיינים בהירים ועמומים בו זמנית.
פשרות בין תאורה גבוהה לבין תאורה חלשה
אופטימיזציה של מצלמה לרגישות קיצונית לעיתים קרובות מפחיתה את קיבולת הטעינה המקסימלית או מגבירה את ההגבר, מה שיכול לדחוס את הטווח הדינמי השמיש. לעומת זאת, אופטימיזציה לטווח דינמי גדול עלולה לפגוע ביכולת הזיהוי של אותות נמוכים.
כתוצאה מכך, יש להעריך את איכות התמונה ביחס למשטר האות הצפוי. מערכת המיועדת להדמיית פלואורסצנציה עמומה נותנת עדיפות לרעש נמוך. מערכת המיועדת לבדיקת שדה בהיר עשויה לתת עדיפות לטווח דינמי וליניאריות.
עומק סיביות אינו שווה לטווח הדינמי
עומק סיביות מגדיר את מידת הדיגיטציה המדויקת של האות האנלוגי, אך הוא אינו יוצר טווח דינמי בפני עצמו. אם רצפת הרעש האנלוגית גבוהה, הגדלת עומק סיביות רק מחלקת את הרעש בצורה מדויקת יותר - היא אינה מרחיבה את טווח האות הניתן לגילוי.
טווח דינמי אמיתי נקבע על ידי פיזיקת החיישן ומאפייני הרעש, לא על ידי רזולוציה דיגיטלית בלבד.
אחידות וארטיפקטים של דפוס קבוע
מעבר לעוצמת האות ולטווח הדינמי, איכות התמונה מושפעת גם מאחידות מרחבית. אפילו כאשר רמות הרעש נמוכות, תופעות לוואי מובנות על פני החיישן יכולות להשפיע על עקביות הרקע ועל האמינות הכמותית.
אי-אחידות הקשורה לקיזוז ולרווח
In מצלמות CMOS, אי-אחידות מסוימות מופיעות כתבניות סטטיות או חוזרות. ארטיפקטים אלה מכונים לעתים קרובות רעש דפוס קבוע (FPN) מכיוון שהמבנה המרחבי שלהם אינו משתנה ממסגרת למסגרת.
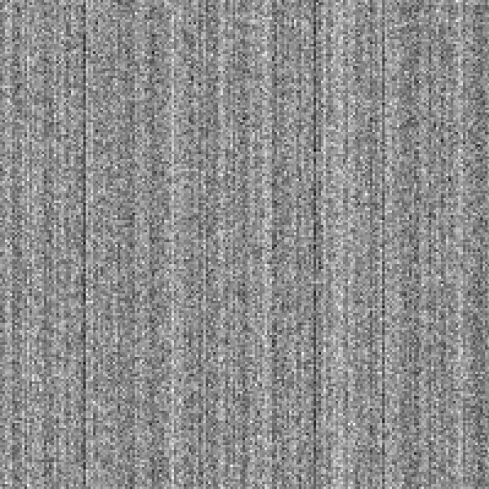
איור 1: רעש עמודה עם דפוס קבוע
הבדלים בערכי ההיסט של ממיר ה-CMOS האנלוגי-לדיגיטלי מעמודה לעמודה גורמים לתבנית נראית לעין של עמודות בהירות וכהות שאינה משתנה בין פריימים עוקבים. נראה כאן ללא אור פוגע. דפוס זה יכול להיות משמעותי בהשוואה לניגודיות של נושא הצילום בתנאי תאורה חלשים, והופך לגלוי לאורך התמונות.
מקור נפוץ אחד הוא וריאציה של קיזוז הקשורה לעמודה. ארכיטקטורות CMOS רבות משתמשות בקריאה מקבילית-עמודה, שבה כל עמודה מעובדת על ידי ממיר אנלוגי-לדיגיטלי (ADC) ייעודי. הבדלים קטנים בין קיזוזי ADC יכולים ליצור פסים אנכיים גלויים בתנאי תאורה חלשים או הטיה. בתכנונים של חיישן מפוצל, עשויה להופיע גם חלוקה אופקית על פני המסגרת.
בתדירות נמוכה יותר, דפוסים הקשורים לשורות יכולים להתרחש כאשר שורות נקראות במקביל עם אי התאמות קלות בהיסט. בעוד שדפוסים אלה עשויים להיות עדינים, מערכת הראייה האנושית רגישה במיוחד לחזרה מובנית, מה שהופך אותם לבולטים יותר מרעש אקראי גרידא.
מתי ארטיפקטים מובנים משפיעים על איכות התמונה?
דפוסים קבועים הקשורים להיסט נראים במיוחד במשטרי אות נמוכים, שבהם האות הבסיסי אינו מסתיר שונות מרחבית. במערכות ישנות יותר או באיכות נמוכה יותר, פריטים כאלה עשויים להיות גלויים אפילו ברמות אות בינוניות. במצלמות sCMOS מודרניות ומכוילות היטב, דפוסי עמודות ושורות מצטמצמים בדרך כלל לרמות מתחת לרעש הקריאה ולכן אינם מורגשים בתנאי הדמיה סטנדרטיים.
עם זאת, חפצים מובנים יכולים להיות בולטים יותר בתהליכי עבודה הכוללים מיצוע פריימים, חיסור רקע או ניתוח אוטומטי. מכיוון שדפוסים כאלה הם שיטתיים, הם אינם מתמקמים כמו רעש אקראי.
מדוע מפרטים עשויים לא לחשוף דפוסים מובנים
בניגוד ל-DSNU, אשר מכמת את וריאציית ההיסט באופן סטטיסטי, דפוסים מובנים אינם נלכדים במלואם על ידי ערך RMS יחיד. דפי מפרט כמעט ולא כוללים תמונות הטיה מייצגות בתאורה חלשה, מה שמקשה על הערכת ארטיפקטים מובנים מספריים בלבד.
ביישומים שבהם אחידות היא קריטית, הערכה אמפירית - במיוחד בתנאים של אות נמוך או ממוצע - עשויה להיות נחוצה כדי לאשר כי ארטיפקטים מרחביים אינם משפיעים על הניתוח.
רזולוציה אינה זהה לאיכות תמונה
רזולוציה נתפסת לעתים קרובות בטעות כאינדיקטור העיקרי לאיכות תמונה. בעוד שרזולוציה מרחבית מגדירה את מידת הדקויות של דגימה או הבחנה בין פרטים, היא אינה מבטיחה נתונים משמעותיים או מדויקים.
ספירת פיקסלים גבוהה יותר או גדלי פיקסלים קטנים יותר מגדילים את צפיפות הדגימה, אך הם אינם מפחיתים רעש, משפרים את הטווח הדינמי או משפרים את האחידות. אם יחס אות לרעש נמוך, הגדלת הרזולוציה עשויה פשוט לחלק את הרעש לפיקסלים קטנים יותר מבלי לשפר את יכולת הגילוי. בהדמיה בתאורה חלשה במיוחד, פיקסלים גדולים יותר עם קיבולת גבוהה יותר של קצה מלא ורעש קריאה נמוך יותר עשויים לייצר איכות תמונה כוללת טובה יותר, גם אם הרזולוציה הנומינלית נמוכה יותר.
רזולוציית המערכת האמיתית תלויה גם באופטיקה, בהגדלה ובתנאי הדגימה - לא רק במפרטי החיישן. מערכת הדמיה מוגבלת על ידי הרכיב החלש ביותר שלה.
בהדמיה מדעית, רזולוציה תורמת לאיכות התמונה, אך רק באיזון עם ביצועי רעש, טווח דינמי ויציבות. יותר פיקסלים לבדם אינם מבטיחים נתונים טובים יותר.
להרכיב את זה - איך להעריך את איכות התמונה
הערכת איכות תמונה בהדמיה מדעית דורשת יותר מקריאת מפרט יחיד. גישה שיטתית מסייעת לזהות אילו גורמים באמת חשובים עבור יישום נתון.
1. הגדירו את משטר האותות.
קבע האם המערכת שלך פועלת בסביבה מוגבלת פוטונים, מוגבלת רעש קריאה או סביבה בעלת אותות גבוהים. מקור הרעש הדומיננטי משתנה עם רמת האות, וכך גם מדד הביצועים הרלוונטי.
2. זהה את הגורם המגביל.
ברמות אות נמוכות, רעש קריאה ואפקטים הקשורים לחושך שולטים לעתים קרובות. ברמות אות גבוהות, טווח דינמי, ליניאריות או אחידות עשויים להיות חשובים יותר. שיפור מפרט שאינו מגביל לעיתים רחוקות משפר את איכות התמונה האמיתית.
3. הערכת עקביות מרחבית.
יש להעריך האם שינויים בתבניות קבועות או חוסר אחידות משמעותיים ביחס לרצפת הרעש. שינויים מובנים יכולים להשפיע על זרימות עבודה כמותיות גם כאשר הרעש הכללי נראה נמוך.
4. יש לקחת בחשבון את הקשר המערכת.
אופטיקה, יציבות תאורה ואסטרטגיית כיול משפיעות כולן על איכות התמונה הסופית. לא ניתן להעריך את ביצועי החיישן בנפרד ממערכת ההדמיה.
בסופו של דבר, איכות התמונה מוגדרת לא על ידי המפרט הגבוה ביותר, אלא על ידי מידת שמירה על אות משמעותי בתנאי פעולה אמיתיים.
דוגמאות יישומים
סדרי עדיפויות לאיכות התמונה משתנים באופן משמעותי בין יישומים מדעיים ותעשייתיים. גורמי המגבלה הדומיננטיים תלויים במשטר האות, ביעדי המדידה ובסבילות לשגיאות שיטתיות.
מיקרוסקופ פלואורסצנטי
בהדמיית פלואורסצנציה - במיוחד בפלואורסצנציה של מולקולה בודדתניסויים - רמות האות עשויות להתקרב למספר אלקטרונים בודדים בלבד לפיקסל. לכן, איכות התמונה מושפעת מאוד מרעש קריאה, יציבות חשיכה ואחידות רקע. אובייקטים של היסט מובנה או פיקסלים חמים יכולים להפריע לגילוי אות חלש ולניתוח עוצמה כמותית. במשטר זה, רגישות וביצועים של רעש נמוך בדרך כלל עולים על טווח דינמי קיצוני.
מערכות בדיקה פועלות לעיתים קרובות ברמות אות בינוניות עד גבוהות, אך דורשות אחידות וחזרתיות מצוינות. אפילו שינויים עדינים בהגבר או בהיסט יכולים להשפיע על ספי גילוי פגמים או על דיוק חיסור הרקע. כאן, ליניאריות, טווח דינמי ועקביות מרחבית הם לעתים קרובות קריטיים יותר מרגישות גולמית.

מַסְקָנָה
איכות תמונה בהדמיה מדעית אינה מוגדרת על ידי מפרט יחיד. היא נובעת מהאיזון בין רמת האות, מקורות הרעש, הטווח הדינמי, הרזולוציה המרחבית והאחידות בתנאי פעולה אמיתיים. אותה מצלמה עשויה לפעול בצורה שונה בהתאם לשאלה האם המערכת מוגבלת בפוטונים, מוגבלת בטווח הדינמי או מוגבלת על ידי דרישות עקביות מרחבית. לכן, הערכה משמעותית דורשת הבנת משטר הרעש הדומיננטי והדיוק הנדרש על ידי היישום.
At טוסן, איכות התמונה מטופלת כאתגר הנדסי ברמת המערכת - תוך התחשבות בפיזיקה של חיישנים, אסטרטגיית כיול ואילוצים ספציפיים ליישום. אם זרימת העבודה שלך דורשת אמינות כמותית או רגישות קיצונית, הצוות שלנו יכול לעזור להעריך את הביצועים בהקשר שבאמת חשוב.
Tucsen Photonics Co., Ltd. כל הזכויות שמורות. בעת ציטוט, אנא ציינו את המקור:www.tucsen.com








