
 25.02.2022
25.02.2022Kameraets bildefrekvens beskriver hvor mange bilder et kamera kan fange per sekund, og det blir ofte behandlet som en hovedspesifikasjon når man evaluerer høyhastighetsbildesystemer. I dynamiske eksperimenter, inspeksjonsarbeidsflyter eller raske biologiske prosesser bestemmer bildefrekvensen direkte hvor mye tidsmessige detaljer som kan fanges opp.
Den spesifiserte maksimale bildefrekvensen er imidlertid ikke en fast verdi. Den avhenger av sensorarkitektur, interesseområde (ROI), eksponeringstid, avlesningsmodus og datagrensesnittbåndbredde. I praksis er den oppnåelige bildefrekvensen et resultat av flere samvirkende faktorer. Å forstå disse faktorene krever at man ser utover bilder per sekund og undersøker hvordan bildetiden er konstruert inne i kamerasystemet.
Hva er kameraets bildefrekvens?
Kameraets bildefrekvens refererer til antall bilder et kamera kan ta per sekund under et definert sett med driftsforhold. Det uttrykkes vanligvis i bilder per sekund (FPS) og representerer hvor raskt etterfølgende bilder kan tas og gjøres tilgjengelige for behandling eller lagring.
Bildefrekvensen bestemmer den tidsmessige oppløsningen til et bildesystem. I dynamiske applikasjoner – som partikkelsporing, høyhastighetsinspeksjon eller raskt skiftende biologiske prosesser – tillater høyere bildefrekvenser mer detaljert observasjon av bevegelse og transiente hendelser.
Bildefrekvens er imidlertid ikke en isolert spesifikasjon. Maksimalt oppnåelige FPS avhenger av kameramodus, interesseområde (ROI), eksponeringstid, bitdybde og grensesnittbåndbredde. En oppgitt «maksimal bildefrekvens» forutsetter vanligvis spesifikke forhold, for eksempel redusert ROI eller en bestemt avlesningsmodus.
For å forstå hva som virkelig begrenser bildefrekvensen, må man undersøke hvor lang tid det tar å hente inn og lese ut et enkelt bilde – kjent som bildetiden – som utforskes i neste avsnitt.
Bildefrekvens vs. bildetid vs. linjetid
Bildefrekvens uttrykkes vanligvis i bilder per sekund (FPS), men FPS er ikke en primær fysisk parameter. Det er det motsatte av tiden som kreves for å hente inn og lese ut en enkelt ramme.
Bildefrekvens = 1 / Bildetid
For å forstå hva som bestemmer bildefrekvensen, må vi derfor undersøke hvordan bildetiden er konstruert.
Hva utgjør rammetid?
Bildetid representerer den totale tiden som kreves for å produsere ett komplett bilde. I de fleste tilfellerCMOS-kameraer, dette inkluderer:
● Eksponeringstid (hvor lenge sensoren samler lys)
● Sensoravlesningstid (hvor lang tid det tar å konvertere og overføre pikselverdier)
● Dataoverføringstid (grensesnittoverføring til vertsdatamaskinen)
Når eksponeringstiden er kort i forhold til avlesningstiden, er bildefrekvensen vanligvis begrenset av avlesningsprosessen. Når eksponeringstiden er lang, kan den i stedet bli den dominerende begrensende faktoren.
Linjetid – Den grunnleggende sensorbegrensningen
For CMOS-sensorer er den primære interne faktoren som begrenser bildefrekvensen linjetiden. Linjetiden er tiden som kreves for en rad med analog-til-digital-omformere (ADC-er) for å måle og digitalisere én rad med piksler.
I de fleste arkitekturer behandles hver rad sekvensielt. Som et resultat bestemmes den totale utlesningstiden for en ramme av antall aktive rader multiplisert med linjetiden:
Rammelesetid = Linjetid × Antall rader
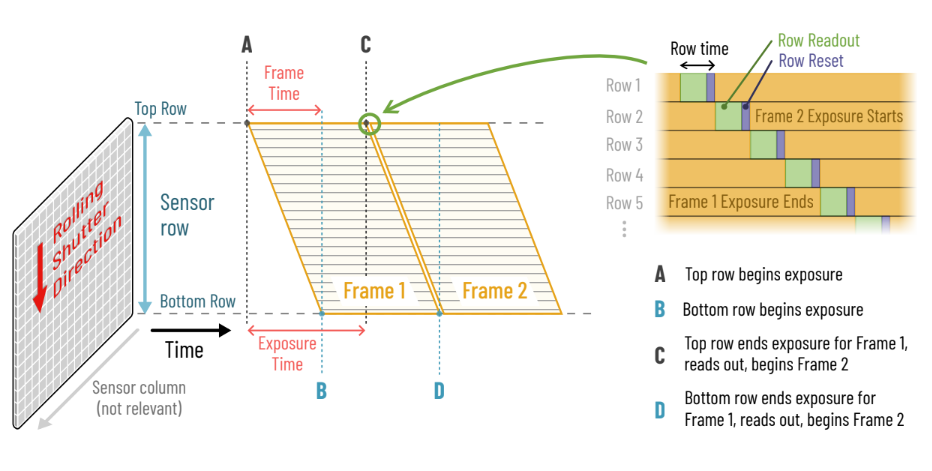
Figur 1: Introduksjon til tidsdiagrammer for rullende lukkere med et «parallellogram»
Igjen:Plott av sensorrad (y-akse) versus tid (x-akse), med gule parallellogrammer som markerer eksponeringen til hver kamerarad på grunn av den rullende lukkeren.
Høyre:En innzooming til det individuelle radnivået, som illustrerer rolleavlesningen og tilbakestillingsspillet for å bestemme rullende lukkerlinjetid.
Dette forklarer hvorfor det å redusere interesseområdet (ROI) – nærmere bestemt antall pikselrader – kan øke bildefrekvensen betydelig. Å halvere antall rader omtrent halverer avlesningstiden og kan nesten doble den oppnåelige FPS-en, forutsatt at andre faktorer forblir konstante.
Linjetiden i seg selv kan variere mellom avlesningsmoduser, men innenfor en gitt modus er den vanligvis fast.
Teoretisk vs. virkelig bildefrekvens
Den «maksimale bildefrekvensen» som er oppgitt i spesifikasjonene beregnes vanligvis kun ut fra lesetiden for bildet. I praksis kan den faktiske bildefrekvensen være lavere på grunn av:
 ● Lengre eksponeringstider
● Lengre eksponeringstider
● Begrensninger på grensesnittbåndbredde
● Forsinkelser i programvare eller behandling
Av denne grunn er det viktig å skille mellom teoretisk maksimal FPS og oppnåelig bildefrekvens under dine faktiske driftsforhold.
Sensornivåfaktorer som påvirker bildefrekvensen
Selv om linjetid og bildelesetid definerer de grunnleggende tidsgrensene for en sensor, kan flere konfigurerbare parametere på kameranivå påvirke oppnåelig bildefrekvens betydelig.
Interesseområde (ROI)
Antall aktive pikselrader bestemmer direkte lesetiden for bildet. Å redusere høyden på interesseområdet reduserer antallet rader som må leses, og dermed forkortes avlesningsvarigheten.
Fordi lesetiden for bilder skaleres omtrent med antall rader, kan halvering av ROI-høyden nesten doble den maksimalt oppnåelige bildefrekvensen – forutsatt at eksponeringstid og grensesnittbåndbredde ikke er begrensende faktorer. For applikasjoner fokusert på et lite område med bevegelse eller deteksjon, er ROI ofte den mest effektive måten å øke hastigheten på.
Binning og delsampling
Pikselbinning kombinerer tilstøtende piksler før avlesning eller digitalisering, noe som effektivt reduserer utgangsoppløsningen og det totale datavolumet. Avhengig av sensorarkitekturen kan binning redusere kravene til datagjennomstrømning og noen ganger forbedre den effektive bildefrekvensen.
Binning reduserer imidlertid ikke alltid den interne linjetiden. I mange CMOS-design leses rader fortsatt sekvensielt selv når piksler kombineres. Som et resultat kan binning forbedre dataoverføringseffektiviteten uten å endre den iboende avlesningstimingen vesentlig.
Bitdybde og avlesningsmoduser
Mangevitenskapelige kameraertilbyr flere avlesningsmoduser, ofte byttet dynamisk område mot hastighet. For eksempel kan en 16-bits modus med høyt dynamisk område prioritere lav lesestøy og stor fullbrønnkapasitet, mens en 12-bits "hastighetsmodus" kan oppnå høyere bildefrekvenser ved å redusere datapresisjon eller endre forsterkningsinnstillinger.

Siden høyere bitdybde øker mengden data per ramme, kan det å bytte til en lavere bitdybde redusere dataoverføringsbelastningen og i noen tilfeller tillate høyere bildefrekvenser – spesielt når grensesnittbåndbredde er en begrensende faktor.
Eksponeringstid og bildefrekvensinteraksjon
Bildefrekvensen bestemmes ikke bare av sensorens avlesningstid. Eksponeringsvarighet kan også begrense hvor raskt etterfølgende bilder kan tas.
Generelt sett styres den maksimalt oppnåelige bildefrekvensen av den tidskomponenten som er lengst: eksponeringstiden eller bildelesetiden. Hvis eksponeringstiden er kortere enn avlesningstiden, begrenser avlesningen bildefrekvensen. Men hvis eksponeringstiden overstiger avlesningsvarigheten, blir eksponeringen den dominerende begrensningen.
I mange CMOS-design med rullende lukker kan eksponering og avlesning delvis overlappe hverandre. Mens én rad leses ut, kan andre rader allerede integrere lys for neste bilde. Denne overlappingen gjør at eksponeringstiden kan være kortere enn den fulle bildelesetiden uten nødvendigvis å redusere bildefrekvensen.
Men når eksponeringstiden blir lengre enn sensorens totale avlesningstid – for eksempel ved fotografering i svakt lys som krever lengre integrasjon – reduseres bildefrekvensen proporsjonalt. I slike tilfeller:
Maksimal bildefrekvens ≈ 1 / Eksponeringstid
Det er viktig å forstå om systemet ditt er avlesningsbegrenset eller eksponeringsbegrenset når du optimaliserer opptakshastigheten. Å øke forsterkningen, forbedre belysningen eller redusere nødvendig integrasjonstid kan være mer effektivt for å øke bildefrekvensen enn å justere ROI eller avlesningsmodus alene.
Begrensninger for grensesnittbåndbredde og datagjennomstrømning
Selv om en sensor kan lese ut bilder i høy hastighet, kan grensesnittet mellom kameraet og vertsdatamaskinen bli den begrensende faktoren.
Hvert innhentede bilde må overføres via en datalink – for eksempel USB, Camera Link eller PCIe – til datamaskinen for behandling eller lagring. Den nødvendige båndbredden avhenger av:
● Bildestørrelse (antall piksler)
● Bitdybde (data per piksel)
● Bildefrekvens
Datahastigheten kan estimeres som:
Datahastighet ≈ (piksler per bilde × bitdybde × bildefrekvens)
For eksempel genererer en 2048 × 2048-sensor som opererer med 16-bits dybde og 100 FPS over 800 MB/s med rådata. Hvis grensesnittet ikke kan opprettholde denne gjennomstrømningen, vil den effektive bildefrekvensen reduseres, eller bilder kan bli midlertidig bufret inne i kameraet.
I mange systemer reduserer ikke bare reduksjon av avkastning eller bytte til en lavere bitdybde avlesningstiden, men reduserer også den nødvendige båndbredden, slik at grensesnittet kan opprettholde høyere FPS.
Det er derfor viktig å skille mellom:
●Sensorbegrenset bildefrekvens, bestemt av linjetid og avlesning
●Grensesnittbegrenset bildefrekvens, bestemt av båndbredde og systemkonfigurasjon
Lagringshastighet, drivereffektivitet og programvareoverhead kan også påvirke ytelsen i den virkelige verden, spesielt under vedvarende høyhastighetsinnhenting.
Å forstå hvor flaskehalsen ligger – sensortiming eller dataoverføring – er viktig når man skal diagnostisere begrensninger i bildefrekvens.
Hvorfor den virkelige bildefrekvensen din er lavere enn spesifikasjonen
Den maksimale bildefrekvensen som er oppført i et kameras spesifikasjonsark beregnes vanligvis under ideelle forhold – ofte ved bruk av et redusert interesseområde (ROI), kort eksponeringstid, spesifikk avlesningsmodus og optimal grensesnittkonfigurasjon. I praksis kan den oppnåelige bildefrekvensen være lavere på grunn av flere vanlige faktorer.
1. Full sensor vs. redusert avkastning
Mange maksimale FPS-verdier er oppgitt ved hjelp av en delvis ROI. Hvis du bruker kameraet med full sensoroppløsning, øker det økte antallet rader direkte bildelesetiden, noe som reduserer oppnåelig bildefrekvens.
2. Eksponeringstiden overstiger avlesningstiden
Hvis eksponeringstiden er lengre enn sensorens bildelesetid, blir den den begrensende faktoren. Ved fotografering i svakt lys reduserer lengre integrasjonstider naturlig nok maksimal FPS, uavhengig av sensorens avlesningskapasitet.
3. Høyere bitdybde eller HDR-moduser
Drift i 16-bits eller HDR-modus øker datavolumet og kan endre avlesningstimingen. Dette kan redusere oppnåelig bildefrekvens sammenlignet med moduser med lavere bitdybde («hastighet»).
4. Begrensninger for grensesnittbåndbredde
USB-, Camera Link- eller PCIe-grensesnitt har begrenset båndbredde. Hvis den nødvendige datahastigheten overstiger vedvarende grensesnittgjennomstrømning, kan effektiv FPS reduseres eller bufres internt.
5. Programvare- og prosesseringskostnader
Triggerkonfigurasjon, bufferstrategi, lagringshastighet og prosesseringsbelastning kan alle påvirke vedvarende bildefrekvens under faktisk innsamling.
For å diagnostisere avvik i bildefrekvens er det viktig å identifisere om begrensningen stammer fra sensortiming, eksponeringsvarighet eller datagjennomstrømning. Først etter å ha identifisert flaskehalsen kan ytelsen optimaliseres effektivt.
Slik optimaliserer du bildefrekvensen for applikasjonen din
Optimalisering av bildefrekvensen begynner med å identifisere den virkelige begrensende faktoren i bildesystemet ditt. Når flaskehalsen er forstått, kan målrettede justeringer forbedre opptakshastigheten betydelig.
1. Reduser interesseområdet (ROI)
Hvis full sensoroppløsning ikke er nødvendig, er det ofte den mest effektive måten å øke bildefrekvensen på å redusere antall aktive rader. Siden bildelesetiden skaleres med radantall, kan det å begrense innhentingen til interesseområdet øke FPS betydelig.
2. Juster eksponeringstiden
Når eksponeringstiden overstiger avlesningstiden, blir den en begrensende faktor. Å øke lysintensiteten, justere forsterkningen på riktig måte eller lempe på signalkravene kan gi kortere eksponeringstider og høyere oppnåelige bildefrekvenser.
3. Velg en passende avlesningsmodus
Hvis tilgjengelig, bruk en hastighetsoptimalisert modus når høyt dynamisk område ikke er kritisk. Lavere bitdybde eller alternative forsterkningsmoduser kan redusere avlesnings- og dataoverføringsbelastningen.
4. Sjekk grensesnitt og datagjennomstrømning
Sørg for at grensesnittbåndbredden støtter den nødvendige datahastigheten. Å redusere bitdybden, begrense oppløsningen eller oppgradere datalinken kan forbedre vedvarende ytelse.
5. Identifiser den dominerende begrensningen
Optimalisering av bildefrekvens er mest effektiv når endringer adresserer den virkelige begrensende komponenten – sensoravlesning, eksponeringsvarighet eller grensesnittbåndbredde – i stedet for å justere urelaterte parametere.
Konklusjon
Kameraets bildefrekvens er ikke en fast spesifikasjon, men resultatet av sensortiming, eksponeringsvarighet og datagjennomstrømning som fungerer sammen under spesifikke driftsforhold. Å forstå forholdet mellom linjetid, bildelesetid, eksponeringstid og grensesnittbåndbredde er viktig når man evaluerer eller optimaliserer innsamlingshastighet. I praksis bestemmes den oppnåelige bildefrekvensen av den tregeste komponenten i bildekjeden.
At Tucsen, bildefrekvensytelsen er konstruert og validert innenfor reelle systembegrensninger – inkludert avlesningsarkitektur, modusvalg og grensesnittkonfigurasjon. Hvis applikasjonen din krever vedvarende høyhastighetsinnhenting, kan teamet vårt hjelpe deg med å evaluere de reelle ytelsesgrensene innenfor din spesifikke arbeidsflyt.
Tucsen Photonics Co., Ltd. Alle rettigheter forbeholdt. Vennligst oppgi kilden ved sitering:www.tucsen.com








