
 13.5.2022
13.5.2022Lukemakohina on epävarmuutta, joka liittyy kameran havaitsemien fotoelektronien lukumäärän sähköiseen mittaukseen. Se on tyypillisesti määriteltyelektronit (e⁻ RMS)ja riippuu lukunopeudesta, vahvistus-/muunnos-vahvistustilasta, ADC-kokoonpanosta ja ROI:sta – joten se on vertailukelpoinen vain, kun olosuhteet vastaavat toisiaan.
Kirkkaissa kohtauksissa,laukauksen ääniyleensä hallitsee ja lukemakohinalla on vain vähän vaikutusta. Hämärässä kuvantamisessa – heikossa fluoresenssissa, tähtitieteessä, lyhyillä valotusajoilla tehtävässä nopeassa kuvauksessa – lukemakohina voi olennaisesti rajoittaa signaali-kohinaa ja jopa havaittavuutta.
Tämä opas näyttää, miten lukemakohinaa tulkitaan, milloin sillä on merkitystä, mitkä asetukset sitä muuttavat ja miten sitä mitataan luotettavasti.
Mitä on lukemakohina?
Lukemaääni (usein kutsutaanlue kohina) on satunnainen epävarmuus, joka syntyy, kun kameralukee ääneenkuva – eli kun kuhunkin pikseliin kerätty varaus muunnetaan jännitteeksi ja sitten digitalisoidaan digitaaliseksi luvuksi (DN). Vaikka optiikka olisi täydellinen ja kohtaus vakaa, lukuelektroniikka ei ole koskaan täysin kohinatonta: vahvistimet, nollaus- ja näytteenottopiirit, analogiset signaalireitit ja analogia-digitaalimuunnin (ADC) voivat kaikki aiheuttaa pieniä vaihteluita. Tuloksena on pikseliä ja kuvaa kohden satunnainen virhe, joka lisätään luettaessa.

Kuva 1: Lue kohinarajoitettu kuva
Tässä erittäin hämärässä tilassa signaaliarvot ovat verrattavissa lukukohinaan, mikä tarkoittaa, että lukukohina on signaali-kohinasuhteen ensisijainen rajoittava tekijä.
Koska anturi mittaa valoa lopultaelektronit, lukemakohina määritetään yleisimmin kohdassaelektronit (e⁻), tyypillisesti kutene⁻ RMSKohinan ilmaiseminen elektroneina helpottaa suorituskyvyn vertailua eri kamera-asetusten ja mallien välillä. (Jos aloitat DN:stä, muuntaminen e⁻:ksi vaatii järjestelmän muunnosvahvistuksen,e⁻/DNNykyaikaisissa tieteellisissä kameroissa lukemakohina voi olla hyvin alhainen – usein~1–3 e⁻ RMS-taso matalakohinaisissa tiloissahämäräkuvausta varten – tarkka arvo riippuu kuitenkin lukunopeudesta, vahvistuksesta/muunnosvahvistustilasta, ADC-kokoonpanosta, ROI:sta ja lämpötilasta.
Tyypilliset arvot ja miksi ne vaihtelevat
MonillesCMOS-kamerat, lukukohina on laskenut niin alas, että hyvin pieniä signaaleja voidaan mitata tarkasti. Muissa anturitekniikoissa ja toimintatiloissa voi esiintyä suurempaa lukukohinaa, erityisesti silloin, kun ne on optimoitu maksimaaliselle kuvanopeudelle. Katso taulukosta 1 joitakin edustavia arvoja. Siksi on tärkeää verrata lukukohinaa vain vastaavissa testiolosuhteissa (tila, lukunopeus, vahvistus, bittisyvyys, ROI jne.).
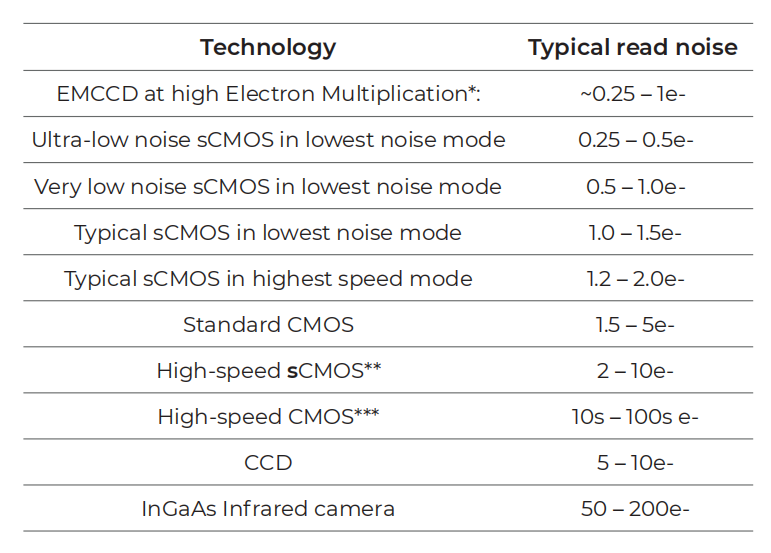
Taulukko 1: Tyypilliset RMS-lukukohina-arvot eri tieteellisille kameratekniikoille
* EMCCD-laitteissa on muita kohinalähteitä, jotka heikentävät niiden herkkyyttä
**Suurnopeuksiset sCMOS-sirut, kutenTucsen Dhyana 2100 sCMOS-kamera
*** NopeaCMOS-kameratkäytetään sekä tieteellisessä kuvantamisessa että filmille nopeaan liikkeentallennukseen. Näitä kameroita ei tyypillisesti voida käyttää hämäräkuvaamiseen niiden suuren kohinan vuoksi, joka peittää hämäräsignaalit.
RMS vs. mediaanilukukohina (ja miksi joissakin datalehdissä näkyy kaksi numeroa)
CMOS/sCMOS-kennoissa lukukohina voi vaihdella hieman pikselistä toiseen, joten voi olla hyödyllistä ajatella lukukohinaa jakaumana eikä yksittäisenä arvona. Joissakin kameroissa on myös pieni "häntä" kohinan sisältäviä pikseleitä, joissa esimerkiksi satunnainen lennätinkohina (RTN) voi olla voimakkaampaa.
Yhteenvetona tästä jakaumasta valmistajat saattavat ilmoittaa mediaanin (tyypillisen) lukukohina-arvon ja joskus lisäksi RMS-arvon, joka on herkempi kohinapitoisemmille pikseleille. Määritelmät voivat vaihdella valmistajasta riippuen, joten turvallisin tapa on tarkistaa ilmoitettu mittausmenetelmä ja -olosuhteet – varsinkin kun vertailet kameroita tai valitset tilan hämärässä työskentelyyn.
Kuinka lukea melutasoja?
Kohina-arvolla on merkitystä vain, jos se liittyy kameran käyttötapaan mittauksen aikana. Tila, bittisyvyys, lukunopeus, vahvistus/muunnosvahvistus ja ROI voivat kaikki muuttaa arvoa – joten vertaa aina tietoja vastaavissa olosuhteissa.
Testiolosuhteet ovat tärkeitä
Lukemakohina-arvolla on merkitystä vain, kun se on sidottukäyttöolosuhteetkäytetään sen mittaamiseen. Sama kamera voi raportoida eri arvoja lukutilasta ja kokoonpanosta riippuen, joten "alempi" ei automaattisesti ole "parempi", ellet vertaa samanlaisia. Ennen kuin vertailet kameroita – tai edes kahta tilaa samassa kamerassa – etsi seuraavat ehdot datalehden taulukosta, alaviitteistä tai suorituskykykaavioista:
●Lukunopeus / pikselitiheys (kHz–MHz):Nopeampi lukema yleensä lisää lukemakohinaa.
Vahvistus-/muunnosvahvistustila (esim. HCG/LCG): Muuttaa e⁻/DN-arvoa ja voi siirtää raportoitua kohina-arvoa.
●ADC-polku / bittisyvyys:Joissakin kameroissa on useita ADC-tiloja, jotka vaikuttavat kohinaan ja kvantisointikäyttäytymiseen.
●ROI ja lukemakanavat:ROI voi muuttaa anturin lukutapaa ja saattaa vaikuttaa suorituskykyyn joissakin arkkitehtuureissa.
●Lämpötila (jos ilmoitettu):Tekniset tiedot mitataan usein tietyssä anturin lämpötilassa; vertaa aina samanlaisissa olosuhteissa.
Jos otsikon lukukohinakuvassa ei ole moodi-/nopeuskontekstia, käsittele sitä epätäydellisenä ja etsi yksityiskohtainen mooditaulukko tai kuvaaja.
Tyypillinen vs. maksimi / mediaani vs. RMS: miksi saatat nähdä kaksi numeroa
Rinnakkaisten lukuarkkitehtuurien ansiostauseimmat CMOS/sCMOS-anturitosoittavat jonkin verran pikselikohtaista vaihtelua lukukohinassa, joten voi olla hyödyllistä ajatella lukukohinaa jakaumana yksittäisen arvon sijaan. Siksi joissakin spesifikaatioissa ilmoitetaan kaksi numeroa.
A mediaanilukukohina-arvo osoittaa, että 50 % pikseleistä on kyseisellä arvolla tai sen alapuolella, mikä usein heijastaa "tyypillistä" suorituskykyä.RMSKuva (jos sellainen on annettu) on herkempi jakauman leviämiselle ja pystyy paremmin kuvaamaan hännän kohinaisempien pikseleiden vaikutusta. Koska määritelmät voivat vaihdella valmistajan mukaan, tarkista aina ilmoitetut mittausolosuhteet ja raportointikäytäntö.
CMOS/sCMOS-anturit voivat näyttääpikselikohtainen vaihtelulukukohinassa, joten lukukohinaa on parempi ajatellajakeluyhden arvon sijaan. Yhteenvetona tästä jakaumasta valmistajat voivat raportoida:
●Tyypillinen / Mediaani:”Tyypillinen pikseli” -luku, joka edustaa tavanomaista suorituskykyä kyseisessä tilassa.
●RMS (tai joskus konservatiivisempi luku):Tilastollinen ominaisuus, joka voi olla herkempi kohinaisille pikseleille ja heijastaa paremmin kokonaishajontaa.
Kaikki myyjät eivät käytä näitä termejä täsmälleen samalla tavalla, joten tarkista aina ilmoitettu määritelmä ja mittausmenetelmä. Epävarmoissa tapauksissa vertaa kameroita käyttämällä alla ilmoitettuja arvoja.sama tilasto ja olosuhteet.
Kameratilojen esimerkkejä (miksi yhdellä kameralla on useita lukukohina-asetuksia)
Jotta tämä olisi konkreettista, harkitseTucsen Aries 6510 erittäin herkkä sCMOS-kameraDatalehdellä lukemakohina raportoidaan useille lukutiloille – koska kameraa voidaan käyttää eri bittisyvyyksillä ja lukuputkilla, ja jokaisella on eri kohinataso:

Kuva 2: Aries 6510:n lukemakohina
Kuinka tätä tulkita: nämä luvut eivät ole ristiriitaisia – ne kuvaavateri toimintapisteissäsamasta kamerasta. Suurempi nopeus (tässä Speed-tila) priorisoi tyypillisesti läpimenoa ja voi näyttää suurempaa lukemakohinaa, kun taas herkkyysoptimoidut putket voivat pienentää lukemakohinan pohjatasoa. Juuri tästä syystä lukemakohinan tekniset tiedot tulisi aina lukeayhdessä tilan nimen ja ilmoitetun bittisyvyyden kanssaKun vertailet kameroita (tai vertaat kameraa julkaistuun arvoon), varmista, että vertaatsama tila, ei vain pienintä otsikkonumeroa.
Milloin lukemakohinalla on merkitystä?
Lukemiskohina ei rajoita kaikkia kokeita. Sen merkitys riippuu yksinkertaisesta kysymyksestä: onko lukukohina merkityksellinen osa kokonaiskohinabudjettiasi käyttämälläsi signaalitasolla? Kirkkaissa olosuhteissa fotoni- (laukaus-) kohina on yleensä hallitseva tekijä. Heikoissa signaaliolosuhteissa lukukohina voi olla termi, joka määrittää signaali-kohinasuhteen – ja joskus myös sen, onko heikko rakenne lainkaan näkyvissä.
Lukuäänen ja laukausäänen vertailu: nopea nyrkkisääntö
Laukausääni kasvaa signaalin mukana√N(jossa N on havaittujen fotoelektronien lukumäärä). Lukemiskohina on karkeastivakio pikseliä kohden kehystä kohdentietylle tilalle. Tämä tarkoittaa:
 ● Kohdassakorkea N, √N on suuri ja lukemakohinan osuus on pieni.
● Kohdassakorkea N, √N on suuri ja lukemakohinan osuus on pieni.
● Kohdassamatala N, √N on pieni ja lukemakohina voi olla hallitseva tekijä.
Käytännön ristumiskohta on silloin, kunlaukausääni ≈ lukuääni, eli kun√N ≈ RSe vastaaN ≈ R².
Esimerkiksi, jos tilassa onR = 2 e⁻ RMS,lukukohinasta tulee merkittävää, kun signaali on luokkaa muutamasta elektronista muutamaan kymmeneen elektroniin pikseliä kohden (koska R2=4). JosR = 10 e⁻, ylitys siirtyy noin arvoon 102 = 100 elektronia pikseliä kohden.
Konkreettinen esimerkki signaali-kohinasuhteesta (miksi se on merkityksetön kirkkaissa kohtauksissa)
Oletetaan, että pikseli sisältää2 000 euroasignaalista. Laukausääni on√2000 ≈ 44,7 e⁻.
Jos lukemakohinaa on10 e⁻, kokonaiskohina (RMS) on:

Signaali-kohinasuhde muuttuu siis arvosta 2000/44,7≈44,7 arvoon 2000/45,8≈43,7 – pieni ero. Toisin sanoen korkeilla signaalitasoilla lukemakohinan vähentäminen harvoin muuttaa näkyvyyttä.
Kirkkaasti valaistuissa kohtauksissa, joissa jokainen pikseli kerää tuhansia fotoelektroneja, lukukohina on vain pieni osa kokonaiskohinabudjetissa. Esimerkiksi 2 000 e⁻:n signaalilla 10 e⁻:n lukukohinan lisääminen muuttaa signaali-kohinasuhdetta vain muutaman prosentin – usein huomaamattoman – kun taas kymmenien elektronien pikselimäärällä lukukohina voi merkittävästi rajoittaa signaali-kohinasuhdetta ja näkyviä yksityiskohtia.
Kun lukemakohinasta tulee todellinen rajoitin
Lukemiskohina on merkittävintä silloin, kun kokeesi on signaalirajoitettu kehystä kohden – eli jokainen pikseli kerää vain pienen määrän fotoelektroneja yhdessä valotuksessa. Tällaisessa tilassa lukukohina voi hallita kohinatasoa, pienentää signaali-kohinasuhdetta ja peittää heikkoa rakennetta.
Yleisiä sovellusvihjeitä ovat:
●Heikko fluoresenssi / alhainen leimaustiheys, erityisesti lyhyillä valotusajoilla tai nopealla aikaviiveellä
●Yksimolekyylinen fluoresenssija lokalisointiin perustuva superresoluutio, jossa signaaleja voi olla vain muutamia fotoneja emitteriä kohden kehystä kohden
●Kemiluminesenssikuvaus, jossa fotonibudjetit ovat luonnostaan pieniä ja lukemakohina voi olla hallitseva
●Nopea toiminnallinen kuvantaminen (jännite/kalvopotentiaali, nopea kalsiumkuvaus), jossa lyhyet valotusajat vähentävät fotonien määrää kuvaa kohden
●Fotonien puutteesta kärsivät kuvantamistyönkulut(esim. erittäin himmeät kehykset, vaikka aiotkin pinota/keskiarvoistaa myöhemmin)
Käytännön tarkistuksena: jos tyypillinen pikselikohtainen signaalisi onsatoja tai tuhansia elektronejakehystä kohden, lukukohina on harvoin hallitsevaa. Jos se onkymmeniä elektroneja tai vähemmän, lukemakohina ja tilan valinta voivat vaikuttaa voimakkaasti kuvanlaatuun.
Johtopäätös
Lukemiskohina on moodista riippuva, lukuketjun rajoittama termi, joten ainoat merkitykselliset vertailut tehdään vastaavissa olosuhteissa (moodi, lukunopeus, vahvistus/muunnosvahvistus, ADC/bittisyvyys, ROI). Kirkkaissa kohtauksissa se on usein merkityksetön, mutta heikkosignaalisessa kuvantamisessa se voi olennaisesti rajoittaa signaali-kohinaa ja havaittavuutta.
Jos haluat suosituksen kokeiluusi, jaa sovelluksesi tiedot (signaalitaso, valotusaika, kuvataajuus, aallonpituus ja kohde-SNR). Kuvantamisasiantuntijamme voivat ehdottaaTucsen-kameraja paras lukutila herkkyyden, nopeuden ja dynamiikan tasapainottamiseksi.








