
 15/06/2022
15/06/2022La capture de la lumière hors foyer représente un défi pour l'obtention d'images nettes et contrastées dans de nombreuses applications d'imagerie. La microscopie à feuille de lumière à balayage numérique (DSLM) offre une solution efficace pour réduire la capture de lumière hors foyer grâce à la synchronisation de l'éclairage avec l'obturateur roulant des caméras CMOS modernes. Cependant, cette synchronisation précise exige un contrôle total du fonctionnement de l'obturateur roulant de la caméra ; une fonctionnalité offerte par les caméras Tucsen dotées du mode de contrôle de l'obturateur roulant.
Qu'est-ce qu'un obturateur roulant ?
L'obturateur est l'élément de l'appareil photo qui déclenche et arrête l'exposition à la lumière. Auparavant, les appareils photo scientifiques utilisaient des obturateurs mécaniques : ils s'ouvraient pour prendre une photo et se fermaient pour arrêter l'exposition. Les obturateurs mécaniques étaient lents et leur fiabilité était sujette à des problèmes lors d'une utilisation prolongée. Désormais, les appareils photo scientifiques utilisent des obturateurs électroniques, nettement plus rapides, plus simples et plus polyvalents.
Les appareils photo à obturateur roulant commencent leur acquisition en haut du capteur et font défiler ligne par ligne jusqu'en bas. Cette acquisition comprend trois étapes : la réinitialisation du signal, l'exposition à la lumière et la lecture.
L'exposition de chaque rangée commence par la réinitialisation du signal acquis de chaque pixel. Une fois le temps d'exposition prévu pour la rangée supérieure écoulé, l'affichage, marquant la fin de l'acquisition, se déroule de la même manière. Il en résulte une zone de pixels actifs qui balaie l'écran de haut en bas, sa hauteur étant déterminée par la durée d'exposition. Lorsque la caméra fonctionne à pleine vitesse, le délai par ligne est généralement compris entre 5 et 25 microsecondes, selon sa vitesse d'acquisition.
Pour exploiter les techniques optiques nécessitant la synchronisation du balayage de l'éclairage et de l'obturateur roulant de l'appareil photo, ce délai est généralement trop court, ce qui signifie que l'obturateur roulant fonctionne trop rapidement pour que les autres composants matériels puissent suivre. C'est là qu'intervient le mode de contrôle de l'obturateur roulant.
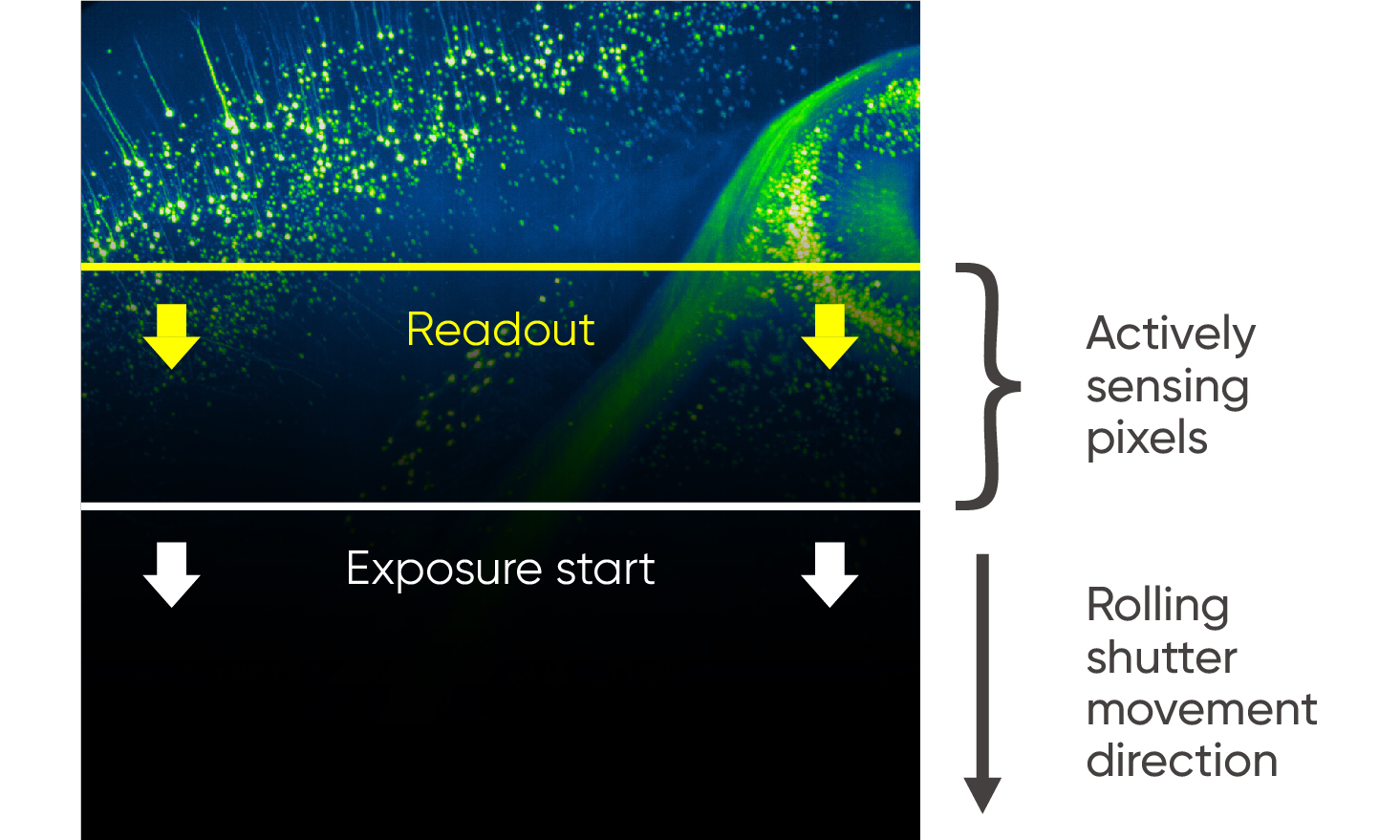
Figure 1 : Schéma de fonctionnement d'un volet roulant
Fonctionnement du mode de commande des volets roulants
Grâce à l'intelligence embarquée des caméras Tucsen, le fonctionnement de l'obturateur roulant peut être ajusté avec précision pour se synchroniser avec du matériel externe. En ajoutant un léger délai entre la réinitialisation et la lecture de chaque ligne, le temps de balayage de la zone de pixels actifs sur le capteur peut être contrôlé afin d'assurer cette synchronisation.
De plus, la hauteur de fente de la zone active scannée peut être ajustée avec précision. Des temps d'exposition plus longs ou des délais de ligne plus courts induisent une hauteur de fente plus importante. Dans le cas d'un DSLM, cela permet de cibler précisément la zone éclairée de l'échantillon, en trouvant un compromis entre une exposition maximale des pixels pour une capture de signal efficace et la réduction de la lumière hors foyer.
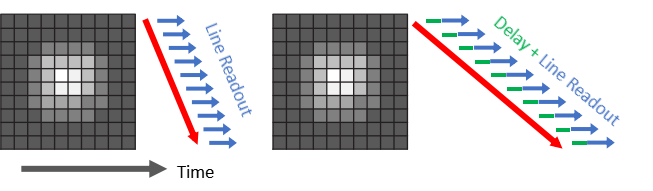
Chiffre2À gauche : Schéma du fonctionnement de l’obturateur à balayage à pleine vitesse. À droite : Schéma illustrant la vitesse de l’obturateur à balayage avec le mode de contrôle de l’obturateur à balayage, ajoutant un délai supplémentaire entre chaque ligne pour permettre la synchronisation avec d’autres périphériques.
Avec ce délai optionnel, il y a maintenant trois variables importantes à comprendre qui déterminent le fonctionnement de l'obturateur roulant, indiquant la hauteur de la zone des pixels « actifs » et la vitesse à laquelle elle parcourt le capteur.
Temps de ligneIl s'agit du temps par défaut nécessaire au capteur pour lire une ligne et passer à la suivante. Il détermine la « vitesse » native du capteur de l'appareil photo et peut être spécifié dans le logiciel de l'appareil photo ou estimé pour une zone d'intérêt (ROI) et un mode de prise de vue donnés :

Où « Fréquence d'images maximale de la caméra » fait référence à la fréquence d'images lorsque celle-ci n'est limitée ni par la durée d'exposition ni par la fréquence de déclenchement externe.
Délai d'exposition:Cela détermine la durée d'activité de chaque ligne de pixels, et donc la hauteur de la zone active pour un temps de ligne et un temps de délai donnés.
Délai de ligne :Voici le délai supplémentaire ajouté par le mode de contrôle à obturateur roulant. Ce mode permet d'ajouter un délai.en multiples entiers du temps de lignePar exemple, si le temps de ligne d'une caméra est de 10 microsecondes, un délai supplémentaire de 1, 2,…On peut ajouter jusqu'à 8 928, ce qui indique le nombre de multiples de 10 microsecondes.
La hauteur de la région d'intérêt (ROI) utilisée est également importante, car elle déterminera le nombre de lignes que la zone active doit parcourir avant de se réinitialiser.
Modes de synchronisation du mode de commande des volets roulants
Le mode de commande des volets roulants propose deux modes de fonctionnement, selon la variable qu'il est plus important de contrôler.
In Mode de délai de ligneVous pouvez régler le délai comme indiqué ci-dessus. Le logiciel pourra alors vous indiquer, pour le temps d'exposition spécifié, la hauteur de fente résultante, c'est-à-dire la hauteur des pixels actifs dans l'obturateur roulant.
In Hauteur du pixel actif / de la fenteEn mode normal, vous pouvez définir le nombre de lignes du capteur à activer lors du balayage par obturateur roulant. Le temps d'exposition spécifié servira ensuite à calculer le délai de ligne nécessaire pour obtenir automatiquement la hauteur de fente souhaitée.
Configuration du mode de commande des volets roulants dans le logiciel
Commandes du mode de fonctionnement (état)
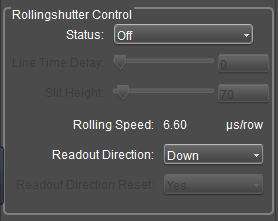
Figure 3 : Exemple d'interface pour la commande du mode de volet roulant à partir du logiciel Tucsen Mosaic. Toutes les options disponible via Micro-Manager et SDK.
Trois statuts (modes de fonctionnement) sont disponibles :Off, Délai de ligne, Hauteur de la fente.
• Lorsqu'il est réglé surDésactivéLe capteur fonctionne normalement, sans délai supplémentaire.
• Lorsqu'il est réglé surDélai de ligneEn mode normal, vous pouvez spécifier le délai de ligne en unités de temps de ligne, comme expliqué ci-dessus.
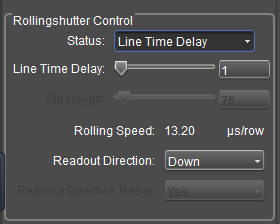
Figure 4 : Options logicielles de délai de ligne. ExempleInterface du logiciel Tucsen Mosaic. Toutes les options sont disponibles via Micro-Manager et le SDK.
Le nombre de cycles de temps de ligne pouvant être ajoutés au délai configurable varie d'une caméra à l'autre. Le nouveau temps de ligne de la caméra, après l'ajout du délai, est alors :
Temps d'intervalle de ligne = Temps de ligne(capteur)+(Temps de ligne)(capteur)× Délai de ligne)
La valeur du paramètrevitesse de roulementest égal àIntervalle de ligne.
Le temps total de lecture de l'image est alors :
RtêteTemps écoulé(image)= Temps d'intervalle de ligne×Nrangées.
NrangéesIl s'agit du nombre total de lignes de pixels d'imagerie dans la région d'intérêt. La fréquence d'acquisition d'images dans ce mode dépend du nombre de lignes à imager et du temps de cycle par ligne :
Fréquence d'images = 1/(Temps de lecture)(image)+ Temps d'exposition)
•Lorsqu'il est réglé surHauteur de la fente mode, vous pouvez définir letaille de la zone active scannée, donnée par tle nombre de lignes de pixels entre le signal « réinitialisation » et le signal « lecture ».La hauteur de fente est comprise entre 1 et 2048 pixels. Pour la convertir en taille physique, multipliez cette valeur par la taille en pixels indiquée dans les spécifications de l'appareil photo.
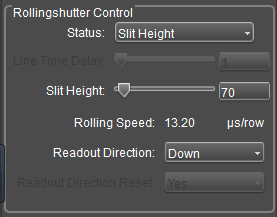
Figure 5 : Options de contrôle du mode de hauteur de fente. ExempleInterface du logiciel Tucsen Mosaic. Toutes les options sont disponibles via Micro-Manager et le SDK.
Le logiciel calculera automatiquement le délai de ligne et l'intervalle de temps de ligne requis, selon la formule suivante :
Délai de ligne = Temps d'exposition(Lignes)/ Hauteur de la fente(Lignes)
En mode haute vitesse (mode gain de la caméra), la plage de hauteur de fente ne peut être réglée que sur une valeur paire, car dans ce mode, les lignes sont lues deux à deux. Les paramètres en mode haute vitesse sont calculés comme suit.
Délai de ligne = Temps d'exposition(Lignes)/ ½ Hauteur de la fente(Lignes)
Hauteur de la fente = (Délai d'exposition(Lignes)÷ Délai de ligne) × 2
Commandes de direction de balayage
Il existe trois options pour le sens de rotation du volet roulant :
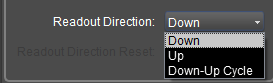
DpropreLe balayage vers le bas est le sens de balayage par défaut des caméras sCMOS. L'obturateur roulant commence par la première ligne en haut du capteur et balaie jusqu'à la dernière ligne en bas. Chaque acquisition d'image suivante commence par la première ligne en haut.
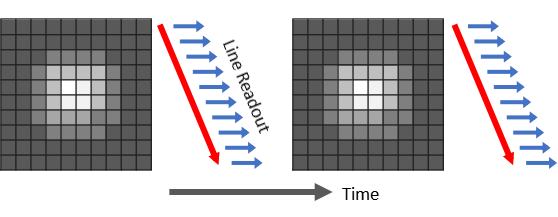
Figure 6 : Schéma du mode de balayage descendant
Up:En mode de balayage ascendant, l'obturateur roulant balaie la première rangée de la première image, en commençant par la rangée inférieure. Chaque acquisition d'image suivante débute également par la rangée inférieure. Bien que l'ordre d'acquisition des données sur la caméra soit inversé, l'image résultante transmise au logiciel conserve son orientation d'origine ; autrement dit, elle n'est pas inversée verticalement par rapport au mode de balayage descendant.
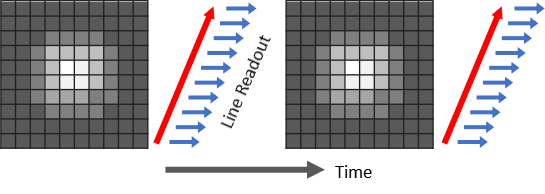
Figure 7 : Schéma du mode de balayage ascendant
Cycle de descente et de remontéeLors d'un balayage alterné de haut en bas, l'obturateur roulant balaie l'image de la première rangée en haut jusqu'à la dernière en bas. Pour l'image suivante, il balaie l'image de la rangée du bas jusqu'à la rangée du haut, et ainsi de suite. L'orientation de l'image acquise dans ce mode est identique à celle du balayage descendant.

Figure 8 : Schéma du mode de balayage cyclique descendant-ascendant
• ReaRéinitialisation de la direction dout
Cette fonction est uniquement disponible en mode Cycle Bas-Haut.
Le réglage par défaut de ce paramètre est « Oui », ce qui garantit que la première image de chaque nouvelle séquence d'acquisition commencera par la ligne la plus haute et descendra progressivement.
Lorsque ce paramètre est défini sur « Non », la première image de chaque nouvelle acquisition commencera à la position de la dernière image de la séquence précédente. Si la dernière image se termine sur la dernière ligne, la première image des acquisitions suivantes commencera sur la dernière ligne et remontera vers le haut.











