 23/10/10
23/10/10עיכוב זמן ואינטגרציה (TDI) היא שיטה ללכידת תמונה הבנויה על עקרון סריקת הקווים, שבה סדרה של תמונות חד-ממדיות נלכדות כדי ליצור תמונה על ידי תזמון תנועת הדגימה ולכידת פרוסת התמונה על ידי טריגר. למרות שטכנולוגיה זו קיימת כבר עשרות שנים, היא נקשרה בדרך כלל ליישומים בעלי רגישות נמוכה, כגון בדיקת רשת.
דור חדש של מצלמות שילב את הרגישות של sCMOS עם המהירות של TDI כדי להציע לכידת תמונה באיכות שווה לסריקת שטח, אך עם פוטנציאל לתפוקה מהירה יותר בסדרי גודל. זה בולט במיוחד במצבים בהם נדרשת הדמיה של דגימות גדולות בתנאי תאורה חלשים. בהערה טכנית זו, אנו מתארים כיצד פועלת סריקת TDI, ומשווים את זמן לכידת התמונה לטכניקת סריקת שטח גדול דומה, הדמיית אריחים ותפרים.
מסריקת קווים ל-TDI
דימות סריקת קווים (Line scan description) הוא טכניקת דימות המשתמשת בשורה אחת של פיקסלים (המכונה עמודה או שלב) כדי לצלם פרוסה של תמונה בזמן שהדגימה בתנועה. באמצעות מנגנוני הפעלה חשמליים, נלקחת "פרוסה" אחת של תמונה כאשר הדגימה עוברת את החיישן. על ידי שינוי קצב ההפעלה של המצלמה כדי ללכוד את התמונה בהתאם לתנועת הדגימה ושימוש בתוכנת "פריים גראבר" (frame grabber) כדי ללכוד את התמונות הללו, ניתן לחבר אותן יחד כדי לשחזר את התמונה.
דימות TDI בנוי על עיקרון זה של לכידת תמונה של דגימה, אך משתמש בשלבים מרובים כדי להגדיל את מספר הפוטואלקטרונים הנלכדים. ככל שהדגימה עוברת כל שלב, נאסף מידע נוסף ומתווסף לפוטואלקטרונים הקיימים שנלכדו בשלבים קודמים ומעורבבים בתהליך דומה להתקני CCD. כאשר הדגימה עוברת את השלב הסופי, הפוטואלקטרונים שנאספו נשלחים לקריאת נתונים, והאות המשולב על פני הטווח משמש ליצירת פרוסת תמונה. באיור 1, מוצגת לכידת תמונה במכשיר עם חמש עמודות TDI (שלבים).
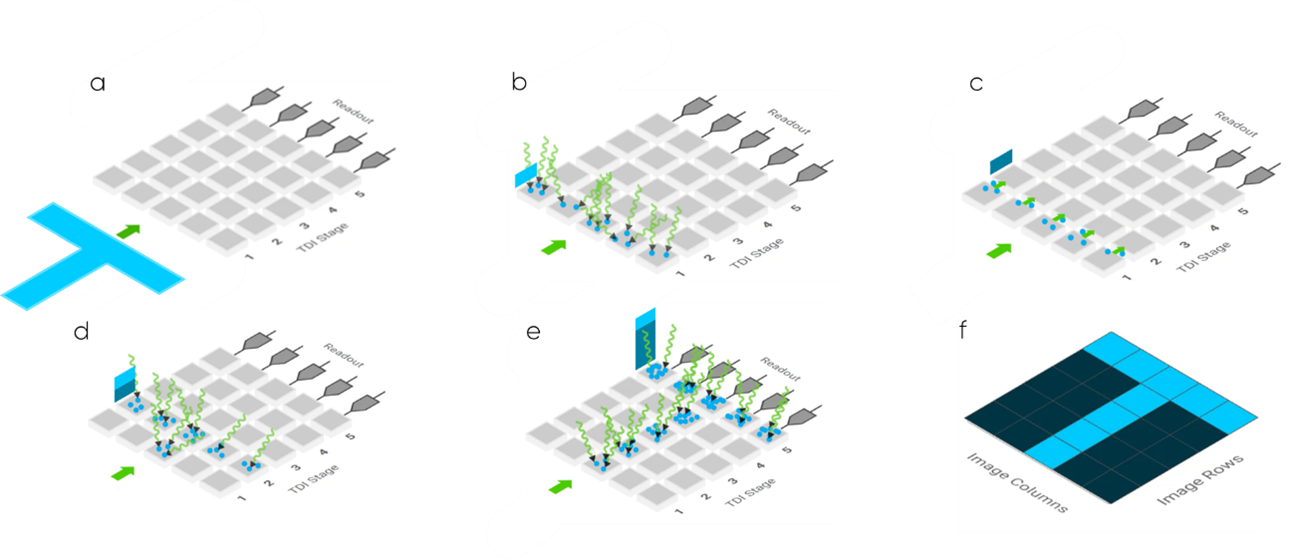
איור 1: דוגמה מונפשת של לכידת תמונה באמצעות טכנולוגיית TDI. דגימה (T כחול) מועברת דרך מכשיר לכידת תמונה TDI (עמודה של 5 פיקסלים, 5 שלבי TDI), ופוטואלקטרונים נלכדים בכל שלב ומתווספים לרמת האות. קריאה ממירה זאת לתמונה דיגיטלית.
1א: התמונה (T כחול) מוצגת על הבמה; ה-T בתנועה כפי שמוצג על המכשיר.
1b: כאשר ה-T עובר את השלב הראשון, מצלמת ה-TDI מופעלת לקלוט פוטואלקטרונים אשר נלכדים על ידי הפיקסלים כשהם פוגעים בשלב הראשון בחיישן ה-TDI. לכל עמודה יש סדרה של פיקסלים אשר לוכדים פוטואלקטרונים בנפרד.
1c: פוטואלקטרונים שנלכדו מועברים לשלב השני, שם כל עמודה דוחפת את רמת האות שלה לשלב הבא.
1d: בהתאם לתנועת הדגימה במרחק של פיקסל אחד, קבוצה שנייה של פוטואלקטרונים נלכדת בשלב השני, ומתווספת לאלו שנלכדו קודם לכן, מה שמגביר את האות. בשלב 1, נלכדת קבוצה חדשה של פוטואלקטרונים, התואמים לפרוסת התמונה הבאה.
1e: תהליכי לכידת התמונה המתוארים בשלב 1d חוזרים על עצמם כאשר התמונה עוברת ליד החיישן. פעולה זו בונה אות מפוטואלקטרונים מהשלבים. האות מועבר לקריאת נתונים, אשר ממירה את אות הפוטואלקטרון לקריאת נתונים דיגיטלית.
1f: הקריאה הדיגיטלית מוצגת כתמונה עמודה אחר עמודה. זה מאפשר שחזור דיגיטלי של תמונה.
מכיוון שהתקן ה-TDI מסוגל להעביר בו זמנית פוטואלקטרונים משלב אחד למשנהו, וללכוד פוטואלקטרונים חדשים מהשלב הראשון בזמן שהדגימה בתנועה, התמונה יכולה להיות למעשה אינסופית במספר השורות הנצמדות. קצבי ההפעלה, הקובעים את מספר הפעמים שבהן מתרחשת לכידת התמונה (איור 1א), יכולים להיות בסדר גודל של מאות קילו-הרץ.
בדוגמה של איור 2, שקופית מיקרוסקופ בגודל 29 x 17 מ"מ צולמה תוך 10.1 שניות באמצעות מצלמת TDI עם 5 מיקרומטר פיקסלים. אפילו ברמות זום משמעותיות, רמת הטשטוש מינימלית. זהו התקדמות עצומה לעומת הדורות הקודמים של טכנולוגיה זו.
לפרטים נוספים, טבלה 1 מציגה זמן הדמיה מייצג עבור סדרה של גדלי דגימה נפוצים בזום של 10, 20 ו-40x.
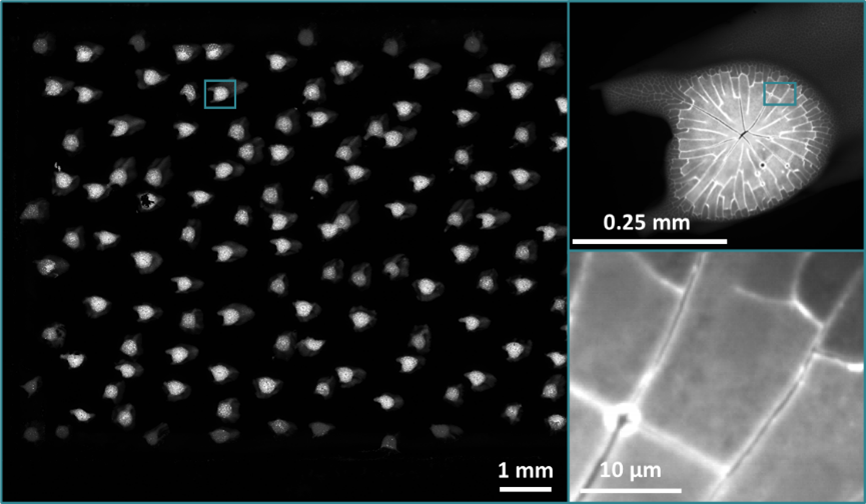
איור 2: תמונה של דגימה פלואורסצנטית שצולמה באמצעות מצלמת Tucsen 9kTDI. חשיפה 10 מילישניות, זמן צילום 10.1 שניות.
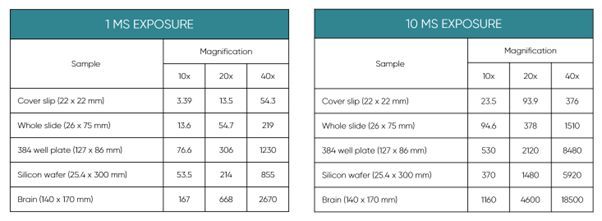
טבלה 1: מטריצה של זמן צילום של גדלי דגימה שונים (שניות) באמצעות מצלמת Tucsen 9kTDI על במה ממונעת מסדרת Zaber MVR במהירות של 10, 20 ו-40 פעמים עבור זמן חשיפה של 1 ו-10 מילישניות.
הדמיית סריקת שטח
דימות סריקת שטח במצלמות sCMOS כולל צילום תמונה שלמה בו זמנית באמצעות מערך דו-ממדי של פיקסלים. כל פיקסל לוכד אור, ממיר אותו לאותות חשמליים לעיבוד מיידי ויוצר תמונה שלמה ברזולוציה ומהירות גבוהות. גודל התמונה שניתן ללכוד בחשיפה אחת נקבע על ידי גודל הפיקסל, ההגדלה ומספר הפיקסלים במערך, לכל (1)

עבור מערך סטנדרטי, שדה הראייה ניתן על ידי (2)

במקרים בהם דגימה גדולה מדי עבור שדה הראייה של המצלמה, ניתן לבנות תמונה על ידי הפרדת התמונה לרשת של תמונות בגודל שדה הראייה. צילום תמונות אלו עוקבת אחר דפוס, שבו הבמה תנוע למיקום על הרשת, הבמה תירגע, ולאחר מכן התמונה תיקלט. במצלמות תריס מתגלגל, יש זמן המתנה נוסף בזמן שהתריס מסתובב. ניתן ללכוד תמונות אלו על ידי הזזת מיקום המצלמה ותפירתן יחד. איור 3 מציג תמונה גדולה של תא אנושי תחת מיקרוסקופ פלואורסצנטי שנוצרה על ידי חיבור 16 תמונות קטנות יותר.
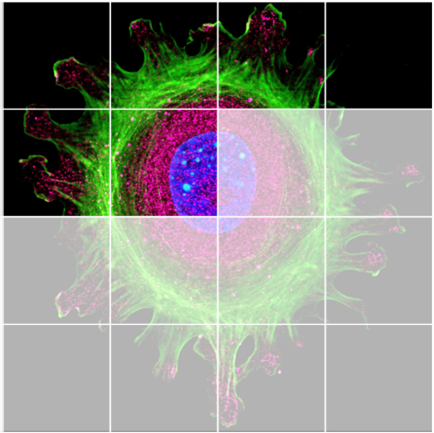
איור 3: שקופית של תא אנושי שצולמה על ידי מצלמת סריקת שטח באמצעות דימות אריחים ותפרים.
באופן כללי, פתרון פרטים רבים יותר ידרוש יצירת תמונות רבות יותר ותפירתן יחד בדרך זו. פתרון אחד לכך הוא להשתמש בסריקת מצלמה בפורמט גדול, אשר כולל חיישנים גדולים עם ספירת פיקסלים גבוהה, בשילוב עם אופטיקה מיוחדת, המאפשרת ללכוד כמות גדולה יותר של פרטים.
השוואה בין TDI לסריקת שטח (Tile & Stitch)
לסריקת דגימות בשטח גדול, גם סריקת Tile & Stitch וגם סריקת TDI הן פתרונות מתאימים, אולם על ידי בחירת השיטה הטובה ביותר, ניתן להפחית משמעותית את הזמן הנדרש לסריקת דגימה. חיסכון בזמן זה נוצר על ידי היכולת של סריקת TDI ללכוד דגימה בתנועה; הסרת העיכובים הקשורים להתייצבות הבמה ותזמון תריס מתגלגל הקשור להדמיית Tile & Stitch.
איור 4 משווה את העצירות (ירוק) והתנועות (קווים שחורים) הנדרשות ללכידת תמונה של תא אנושי הן בסריקת tile & stitch (משמאל) והן בסריקת TDI (ימין). על ידי ביטול הצורך לעצור וליישר מחדש את התמונה בהדמיית TDI, ניתן לקצר משמעותית את זמן ההדמיה, בתנאי שזמן החשיפה נמוך <100 אלפיות השנייה.
טבלה 2 מציגה דוגמה מעשית של סריקה בין מצלמת TDI 9k למצלמת sCMOS סטנדרטית.
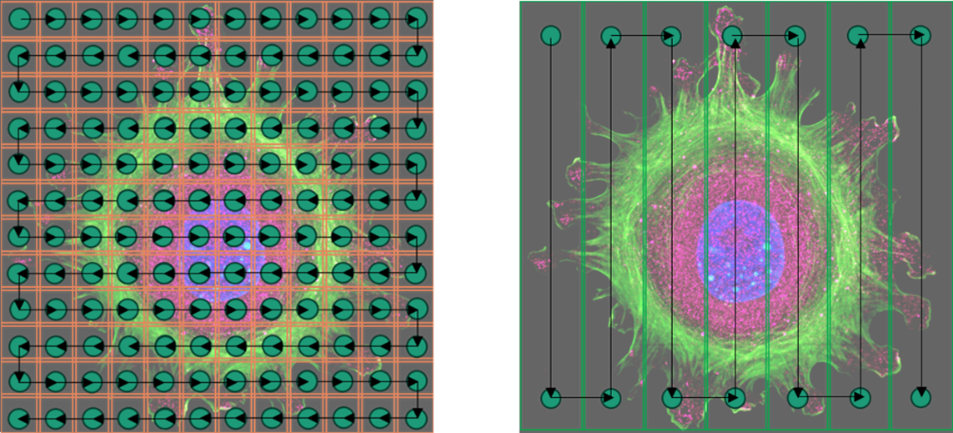
איור 4: מוטיב סריקה של לכידת תא אנושי תחת פלואורסצנציה המציג הדמיית אריחים ותפרים (משמאל) והדמיית TDI (מימין).
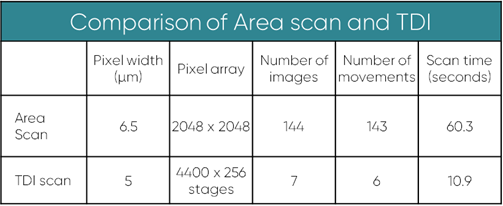
טבלה 2: השוואה בין סריקת שטח והדמיית TDI עבור דגימה בגודל 15 x 15 מ"מ עם עדשת אובייקטיבית 10x וזמן חשיפה של 10 מילישניות.
בעוד ש-TDI מציע פוטנציאל פנטסטי להגברת מהירות לכידת תמונה, ישנם ניואנסים לשימוש בטכנולוגיה זו. עבור זמני חשיפה ארוכים (מעל 100 אלפיות השנייה), חשיבות הזמן שאובד להיבטים של תנועה והתייצבות בסריקת השטח מצטמצמת ביחס לזמן החשיפה. במקרים כאלה, מצלמות סריקת שטח עשויות להציע זמני סריקה קצרים יותר בהשוואה להדמיית TDI. כדי לראות האם טכנולוגיית TDI יכולה להציע לך יתרונות על פני המערכת הנוכחית שלך,צרו קשרעבור מחשבון השוואה.
יישומים אחרים
שאלות מחקר רבות דורשות מידע רב יותר מתמונה בודדת, כגון רכישת תמונה רב-ערוצית או רב-פוקוסית.
הדמיה רב-ערוצית במצלמת סריקת שטח כרוכה בלכידת תמונות באמצעות אורכי גל מרובים בו זמנית. ערוצים אלה תואמים בדרך כלל לאורכי גל שונים של אור, כגון אדום, ירוק וכחול. כל ערוץ לוכד מידע ספציפי על אורך גל או ספקטרלי מהסצנה. לאחר מכן המצלמה משלבת ערוצים אלה כדי ליצור תמונה בצבע מלא או רב-ספקטרלית, המספקת תצוגה מקיפה יותר של הסצנה עם פרטים ספקטרליים ברורים. במצלמות סריקת שטח, זה מושג על ידי חשיפות נפרדות, אולם, עם הדמיית TDI, ניתן להשתמש במפצל כדי להפריד את החיישן לחלקים מרובים. פיצול של 9kTDI (45 מ"מ) ל-3 חיישנים בגודל 15.0 מ"מ עדיין יהיה גדול יותר מחיישן סטנדרטי (רוחב פיקסלים 6.5 מיקרומטר, 2048 פיקסלים) ברוחב של 13.3 מ"מ. יתר על כן, מכיוון ש-TDI דורש תאורה רק על החלק של הדגימה המצולמת, ניתן לבצע מחזורי סריקות מהר יותר.
תחום נוסף שבו זה עשוי להיות המצב הוא הדמיה מרובת-פוקוסים. מצלמות סריקה אזורית של הדמיה מרובת-פוקוס כוללות צילום תמונות מרובות במרחקי מיקוד שונים ומיזוג שלהן ליצירת תמונה מורכבת כאשר כל הסצנה בפוקוס חד. היא מטפלת במרחקים משתנים בסצנה על ידי ניתוח ושילוב אזורים בפוקוס מכל תמונה, וכתוצאה מכך ייצוג מפורט יותר של התמונה. שוב, באמצעותמפצלכדי לחלק את חיישן ה-TDI לשני חלקים (22.5 מ"מ), או שלושה חלקים (15.0 מ"מ), ייתכן שניתן יהיה להשיג תמונה מרובת-פוקוסים מהר יותר מאשר תמונה מקבילה בסריקת שטח. עם זאת, עבור תמונות מרובות-פוקוסים מסדר גבוה יותר (z-packs של 6 או יותר), סריקת שטח צפויה להישאר טכניקת ההדמיה המהירה ביותר.
מסקנות
הערה טכנית זו מתארת את ההבדלים בין סריקת שטח לטכנולוגיית TDI לסריקת שטחים גדולים. על ידי מיזוג סריקת קווים ורגישות sCMOS, TDI משיגה הדמיה מהירה ואיכותית ללא הפרעות, ועולה על שיטות סריקת שטח מסורתיות כמו אריחים ותפרים. העריכו את היתרונות של שימוש במחשבון המקוון שלנו, תוך התחשבות בהנחות השונות המתוארות במסמך זה. TDI מהווה כלי רב עוצמה להדמיה יעילה עם פוטנציאל גדול להפחתת זמני הדמיה בטכניקות הדמיה סטנדרטיות ומתקדמות כאחד.אם תרצו לבדוק האם מצלמת TDI או מצלמת סריקת שטח יכולה להתאים ליישום שלכם ולשפר את זמן הצילום, צרו איתנו קשר עוד היום.








