
 2025/09/17
2025/09/17Med kommersialiseringen av 3nm-teknologi, økende etterspørsel etter AI-brikker og kontinuerlige fremskritt innen mobile prosessorer, har halvlederproduksjon gått inn i en æra med enestående presisjon. I dette miljøet stiller kritiske prosesser som waferdefektinspeksjon og EUV-maskeinspeksjon stadig strengere krav til bildesystemer.
TDI-kameraer (Time Delay Integration) – kjent for høyhastighetsskanning, stor feltdekning og høyoppløselig bildebehandling – har blitt viktige komponenter i avansert inspeksjonsutstyr. Likevel avhenger deres ultimate nøyaktighet av én kritisk faktor: korrigering av bildestøy som ikke er ensartet.
Som en ledende innenlandskTDI-kameraLeverandøren Tucsen Photonics har bygget sterk ekspertise innen DSNU/PRNU-korreksjon, noe som muliggjør høyere pålitelighet i halvlederinspeksjon. Denne artikkelen utforsker prinsippene, utviklingen og anvendelsene av DSNU/PRNU-korreksjon, og hvorfor den spiller en avgjørende rolle i avansert prosessinspeksjon.
Forstå DSNU og PRNU
I teorien skal hver piksel i en bildesensor reagere identisk under de samme forholdene, enten i mørke eller under belysning. I praksis forårsaker små variasjoner i produksjon, materialavvik og ufullkommenheter i avlesningskretsene forskjeller fra piksel til piksel, noe som resulterer i fast mønsterstøy (FPN).
DSNU (mørkt signal ikke-uniformitet)
● DSNU oppstår når piksler genererer forskjellige nivåer av mørk strøm i fullstendig mørke, noe som fører til lyse eller mørke, faste flekker, striper eller flekker. Det blir spesielt merkbart under lange eksponeringer eller bilder i svakt lys.
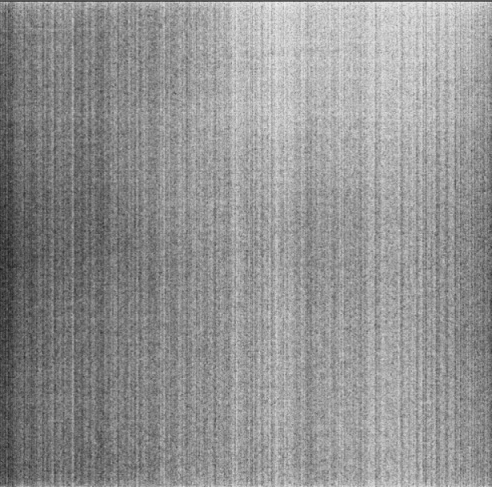
Figur 1-1:En av de mest typiske manifestasjonene av DSNU, som tydelig viser egenskapene til inhomogenitet i pikselmørkesignaler.
PRNU (Fotorespons-ikke-uniformitet)
● PRNU refererer til piksel-til-piksel-variasjoner i fotoelektrisk konverteringseffektivitet under jevn belysning. Årsaker inkluderer feiljustering av mikrolinser, forskjeller i diodestørrelse og ujevn doping. PRNU manifesterer seg vanligvis som lysstyrketekstur, bånding eller rutenettlignende mønstre.
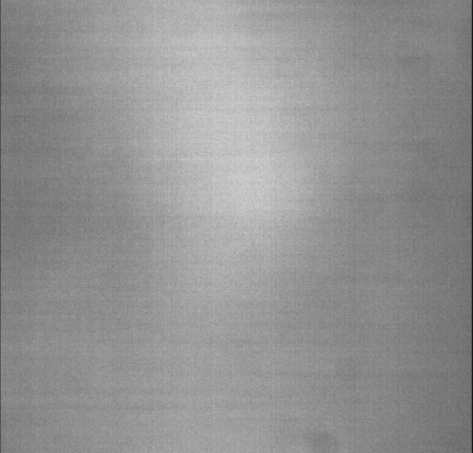
Figur 1-2:En av de mest typiske manifestasjonene av PRNU, som tydelig viser egenskapene til pikselfotorespons-ujevnhet.
Hvordan DSNU/PRNU-korreksjon fungerer
Målet med DSNU/PRNU-korrigering er å undertrykke pikselindividualitet, slik at alle piksler oppfører seg som om de var ideelle. Etter korrigering nærmer bildebakgrunnene seg ensartet gråtone, noe som gir høyere målepresisjon og datapålitelighet.
Vanlige tilnærminger inkluderer:
1. Statisk korreksjon
Bruk av mørkfelt- og flatfeltkalibreringsdata for å kompensere for iboende pikselforskjeller. Denne metoden er enkel, men følsom for temperaturdrift, aldring av enheten og variasjon i lyskilden.
2. Kjøling og temperaturkontrollkorrigering
Bruk av termoelektrisk kjøling (TEC) for å undertrykke mørkstrøm og DSNU, kombinert med kalibreringsprofiler for flere temperaturer. Dette stabiliserer bakgrunnens ensartethet og sikrer pålitelig ytelse over lengre tids drift.
3. AI-basert sanntidskorreksjon (fremvoksende trend)
Utnyttelse av FPGA/ISP-sampling med AI-drevne dynamiske algoritmer for å justere korreksjonskoeffisienter i sanntid. Denne tilnærmingen tilpasser seg lysfluktuasjoner, temperaturdrift og pikselaldring, noe som gjør den egnet for fremtidige høykapasitetsinspeksjonssystemer.
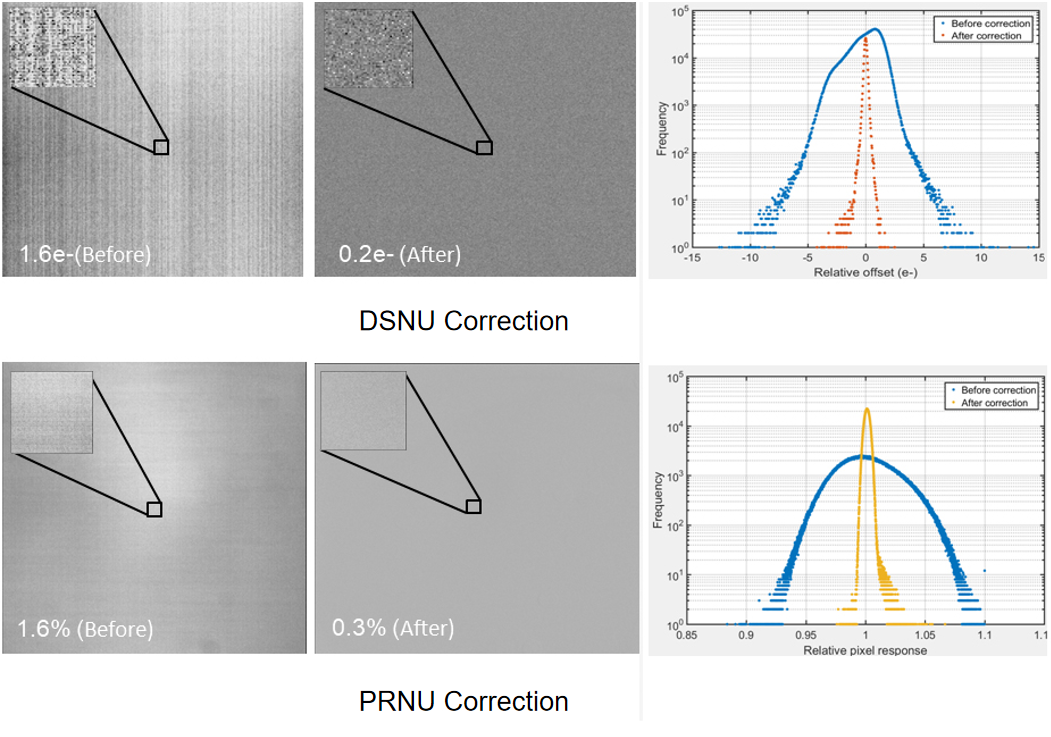
Figur 2:Sammenligning av DSNU/PRNU-korreksjonsresultater før og etter. Etter korrigering er bildebakgrunnen svært ensartet.
Teknologitrender
Etter hvert som avanserte produksjonsprosesser for halvledere fortsetter å utvikle seg og etterspørselen etter banebrytende brikker drevet av AI-applikasjoner fortsetter å øke, stiller industrien høyere forventninger til inspeksjonsnøyaktighet. Kalibreringsteknologier gjennomgår også et skifte: de beveger seg bort fra tradisjonell "justering etter fullføring" og "prosessundertrykkelse" mot mer intelligent kalibrering i sanntid.
Utfordringer innen halvlederinspeksjon
For avanserte halvlederprosesser bestemmer bakgrunnsuniformitet direkte detekterbarheten av defekter med lav kontrast.
● Lysfeltinspeksjon (defekter med lav kontrast)
Mange defekter på waferoverflaten – som nanopartikler, litografiske rester og mikroskraper – avviker fra bakgrunnen med så lite som 1–3 %. Hvis PRNU-nivåene er i samme område, kan defektsignaler bli begravd i bakgrunnsstøy, noe som fører til tapte deteksjoner.
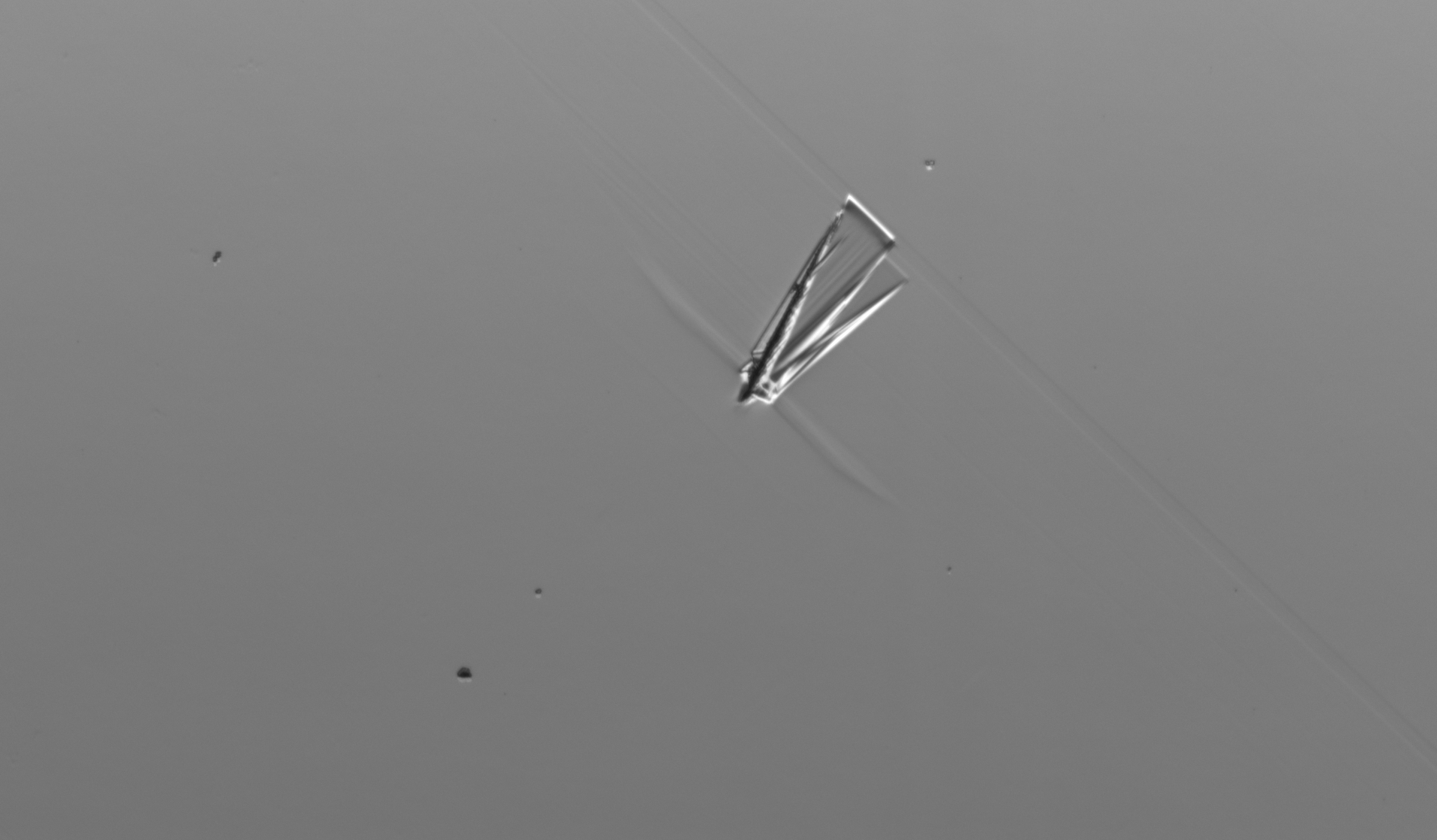
Figur 3-1:Eksempel på halvlederinspeksjonsbilde under DIC-lysfeltmodus
● Inspeksjon av mørkefelt eller svakt lys (ekstremt svake signaler)
Mørkefeltmetoder er avhengige av svake spredte signaler som kan være størrelsesordener under bakgrunnen. DSNU kan produsere falske lyse mønstre i mørke områder, som lett kan feilklassifiseres som defekter. I fotoluminescens (PL) eller elektroluminescens (EL) testing, der signaler kan være bare titalls elektroner, kan selv små DSNU-rester skjule virkelige defekter.

Figur 3-2:Representativt mørkefeltbilde av defektinspeksjon i halvledere
● Flermodusinspeksjon (komplekse forhold)
Avanserte systemer kombinerer ofte flere bølgelengder, vinkler og linjehastigheter. DSNU- og PRNU-egenskapene varierer imidlertid på tvers av disse modusene. Hvis korreksjonene ikke kan tilpasses dynamisk, synker deteksjonsnøyaktigheten betydelig i visse konfigurasjoner.
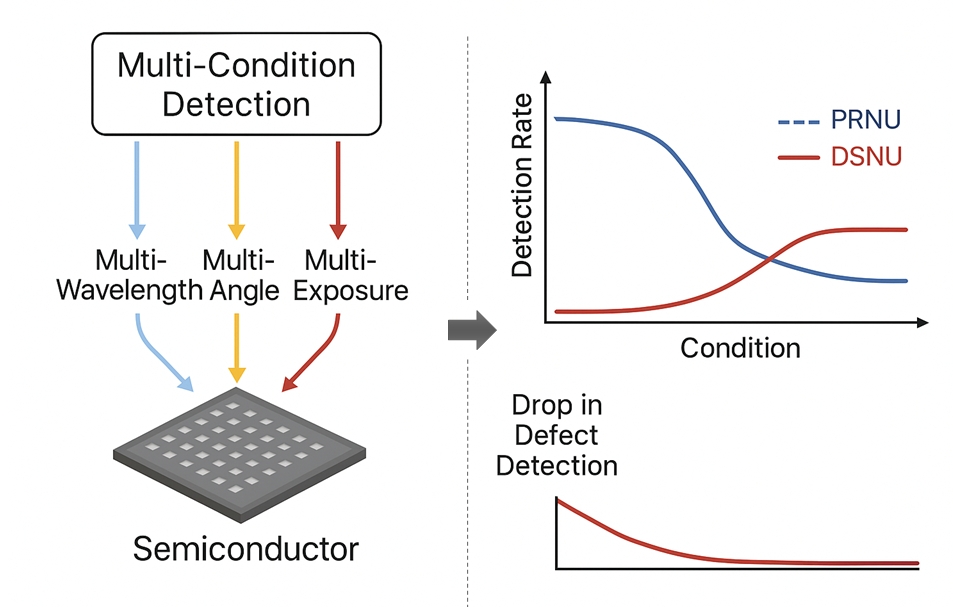
Figur 3-3:Skjematisk illustrasjon av smertepunkter i et flertilstands halvledersystem
Tucsens avanserte DSNU/PRNU-korreksjonsteknologi
For å håndtere disse smertepunktene bruker Tucsen TDI-kameraer et komplett DSNU/PRNU-undertrykkelsessystem, som kombinerer kjøling, temperaturkontroll og høypresisjonskalibrering. Dette sikrer stabil inspeksjon med høy nøyaktighet, selv ved lange driftstider, variable moduser og forhold med lite lys.
1. Høytytende kjøling og temperaturkontroll
● Avanserte TEC-moduler reduserer mørkestrøm og DSNU-baseline betraktelig.
● Presisjonstemperaturstyring holder temperaturen stabil innenfor ±0,5 °C, noe som forhindrer kalibreringsavvik under langvarig drift.
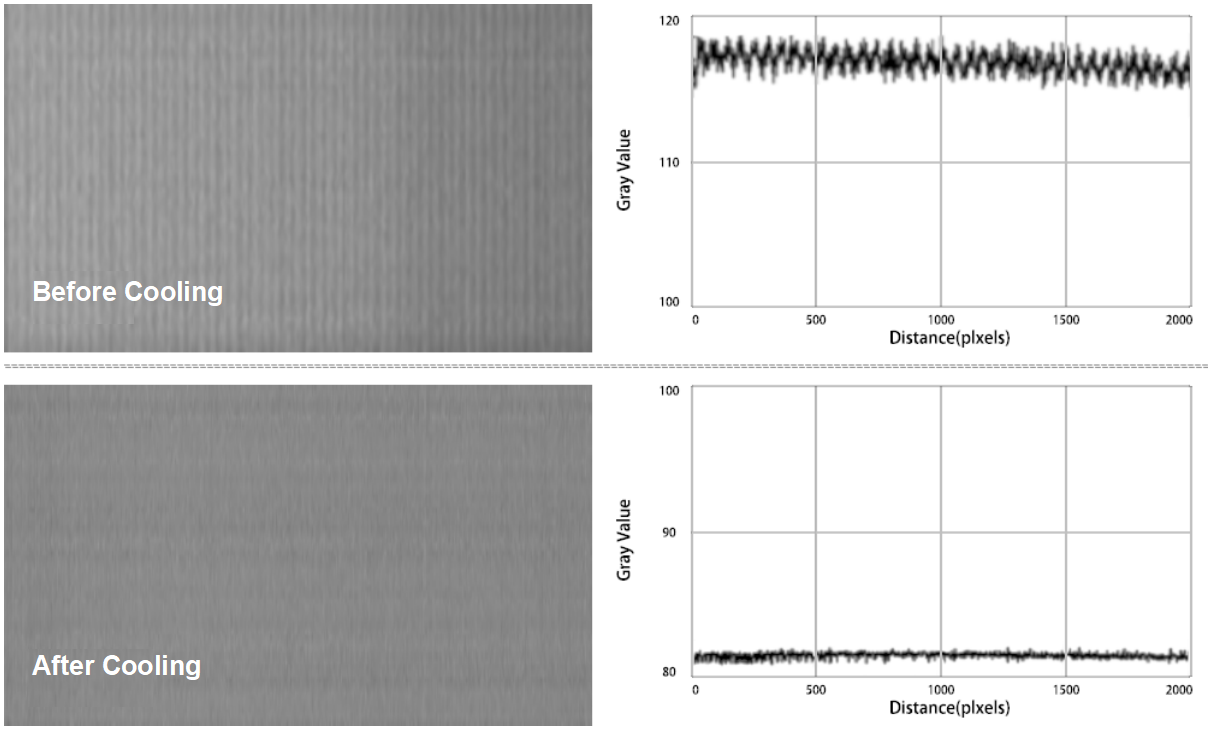
Figur 4-1:Sammenligning av bakgrunnsuniformitet før og etter kjøling for Tucsens TDI-kamera
2. Høypresisjonskalibrering
● Lagrer og veksler mellom hundrevis av kalibreringsprofiler for å tilpasse seg moduser for flere bølgelengder, flere vinkler og flere frekvenser.
● For eksempel,Gemini 8K TDI scmos-kameraoppnår PRNU så lavt som 0,124 % og DSNU (10-bit) på bare 5,8 e⁻, tilstrekkelig til å løse defekter med <1 % kontrast.
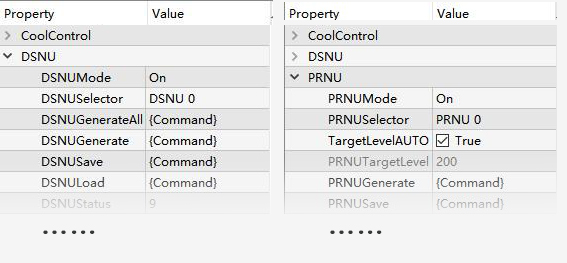
Figur 4-2:Brukergrensesnitt for PRNU/DSNU-korreksjon i Tucsens TDI-kameraprogramvare
Utsikter: Fra hjelpeteknologi til kjerneteknologi
Etter hvert som halvlederproduksjonen utvikler seg, har DSNU/PRNU-korreksjon utviklet seg fra en støttende funksjon til en sentral muliggjører av inspeksjonsnøyaktighet.
Tucsen Photonics fortsetter å investere i neste generasjons korreksjonsteknologier, med fokus på høyere presisjon, intelligent tilpasning og bredere applikasjonsdekning. Denne forpliktelsen støtter både innenlandsk selvstendighet og global konkurranseevne innen halvlederproduksjon.
Med økende etterspørsel fra AI, IoT og autonom kjøring, vil kravene til inspeksjonsnøyaktighet bare øke ytterligere. Selskaper som mestrer grunnleggende korreksjonsteknologier vil ha fordelen med å drive fremskritt på tvers av halvlederindustrien.
Kontakt oss
For detaljerte spesifikasjoner, bruksområder eller tilpassede løsninger for Tucsens TDI-kameraer, vennligst kontakt vårt tekniske team. Vi tilbyr full støtte fra løsningsdesign til integrering av produksjonslinjen.
Vil du vite mer? Ta en titt på relaterte artikler:
TDI-kameraer 101: Hva de er og hvordan de fungerer
Hvorfor TDI-kamerateknologi vinner terreng innen industriell bildebehandling
Tucsen Photonics Co., Ltd. Alle rettigheter forbeholdt. Vennligst oppgi kilden ved sitering:www.tucsen.com








