
 2025/09/17
2025/09/17Med kommersialiseringen av 3nm-teknik, ökande efterfrågan på AI-chip och kontinuerliga framsteg inom mobila processorer har halvledartillverkning gått in i en era av oöverträffad precision. I denna miljö ställer kritiska processer som waferdefektinspektion och EUV-maskinspektion allt strängare krav på bildsystem.
TDI-kameror (Time Delay Integration) – kända för höghastighetsskanning, stor fälttäckning och högupplöst bildbehandling – har blivit viktiga komponenter i avancerad inspektionsutrustning. Ändå är deras ultimata noggrannhet beroende av en kritisk faktor: korrigering av bildbrus som orsakar bristande enhetlighet.
Som en ledande inhemskTDI-kameraLeverantören Tucsen Photonics har byggt upp stark expertis inom DSNU/PRNU-korrigering, vilket möjliggör högre tillförlitlighet vid halvledarinspektion. Den här artikeln utforskar principerna, utvecklingen och tillämpningarna av DSNU/PRNU-korrigering, och varför den spelar en avgörande roll vid avancerad processinspektion.
Att förstå DSNU och PRNU
I teorin borde varje pixel i en bildsensor reagera identiskt under samma förhållanden, oavsett om det är i mörker eller ljus. I praktiken orsakar små variationer i tillverkning, materialavvikelser och defekter i avläsningskretsarna skillnader mellan pixels, vilket resulterar i fast mönsterbrus (FPN).
DSNU (Mörksignal-icke-uniformitet)
● DSNU uppstår när pixlar genererar olika nivåer av mörkerström i fullständigt mörker, vilket leder till ljusa eller mörka fasta fläckar, ränder eller fläckar. Det blir särskilt märkbart vid långa exponeringar eller fotografering i svagt ljus.
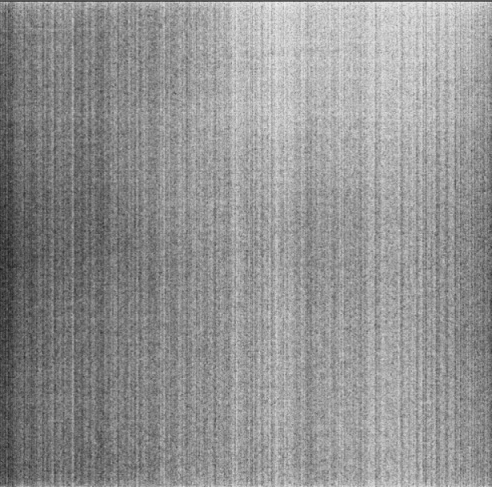
Figur 1-1:En av de mest typiska manifestationerna av DSNU, som tydligt visar egenskaperna hos inhomogenitet i pixelmörkersignaler.
PRNU (Fotorespons-icke-uniformitet)
● PRNU hänvisar till variationer från pixel till pixel i fotoelektrisk omvandlingseffektivitet under jämn belysning. Orsakerna inkluderar feljustering av mikrolinser, skillnader i diodstorlek och ojämn dopning. PRNU manifesterar sig vanligtvis som ljusstyrkestruktur, band eller rutnätsliknande mönster.
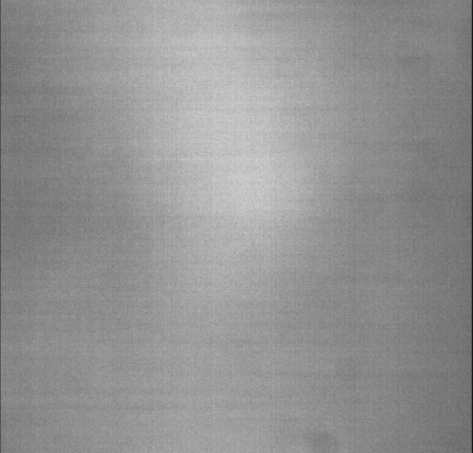
Figur 1-2:En av de mest typiska manifestationerna av PRNU, som tydligt visar egenskaperna hos pixelfotoresponsens olikformighet.
Hur DSNU/PRNU-korrigering fungerar
Målet med DSNU/PRNU-korrigering är att undertrycka pixelindividualitet, vilket gör att alla pixlar beter sig som om de vore idealiska. Efter korrigering närmar sig bildbakgrunderna enhetlig gråskala, vilket möjliggör högre mätprecision och datatillförlitlighet.
Vanliga metoder inkluderar:
1. Statisk korrigering
Användning av mörkfälts- och plattfältskalibreringsdata för att kompensera för inneboende pixelskillnader. Denna metod är enkel men känslig för temperaturdrift, enhetens åldrande och variationer i ljuskällan.
2. Kylning och temperaturkontrollkorrigering
Användning av termoelektrisk kylning (TEC) för att undertrycka mörkerström och mörkerström (DSNU), i kombination med kalibreringsprofiler för flera temperaturer. Detta stabiliserar bakgrundsuniformitet och säkerställer tillförlitlig prestanda under längre tids drift.
3. AI-baserad realtidskorrigering (framväxande trend)
Utnyttjar FPGA/ISP-sampling med AI-drivna dynamiska algoritmer för att justera korrigeringskoefficienter i realtid. Denna metod anpassar sig till ljusfluktuationer, temperaturdrift och pixelåldring, vilket gör den lämplig för framtida högkapacitetsinspektionssystem.
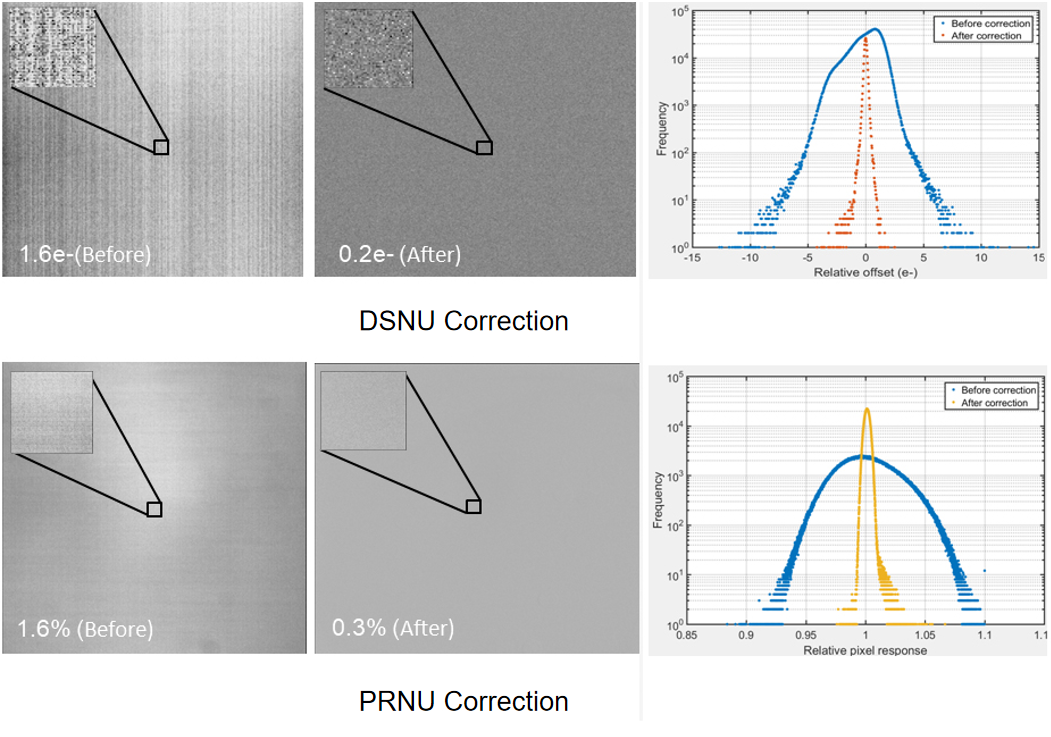
Figur 2:Jämförelse av DSNU/PRNU-korrigeringsresultat före och efter. Efter korrigering är bildbakgrunden mycket enhetlig.
Tekniktrender
I takt med att avancerade tillverkningsprocesser för halvledare fortsätter att utvecklas och efterfrågan på banbrytande chip drivna av AI-applikationer fortsätter att öka, ställer branschen högre förväntningar på inspektionsnoggrannhet. Kalibreringstekniker genomgår också ett skifte: de går bort från traditionell "justering efter slutförande" och "processundertryckning" mot mer intelligent kalibrering i realtid.
Utmaningar vid halvledarinspektion
För avancerade halvledarprocesser avgör bakgrundsuniformiteten direkt detekterbarheten av defekter med låg kontrast.
● Brightfield-inspektion (defekter med låg kontrast)
Många defekter på waferytorna – såsom nanopartiklar, litografiska rester och mikrorepor – skiljer sig från bakgrunden med så lite som 1–3 %. Om PRNU-nivåerna ligger inom samma intervall kan defektsignaler döljas i bakgrundsbruset, vilket leder till missade detektioner.
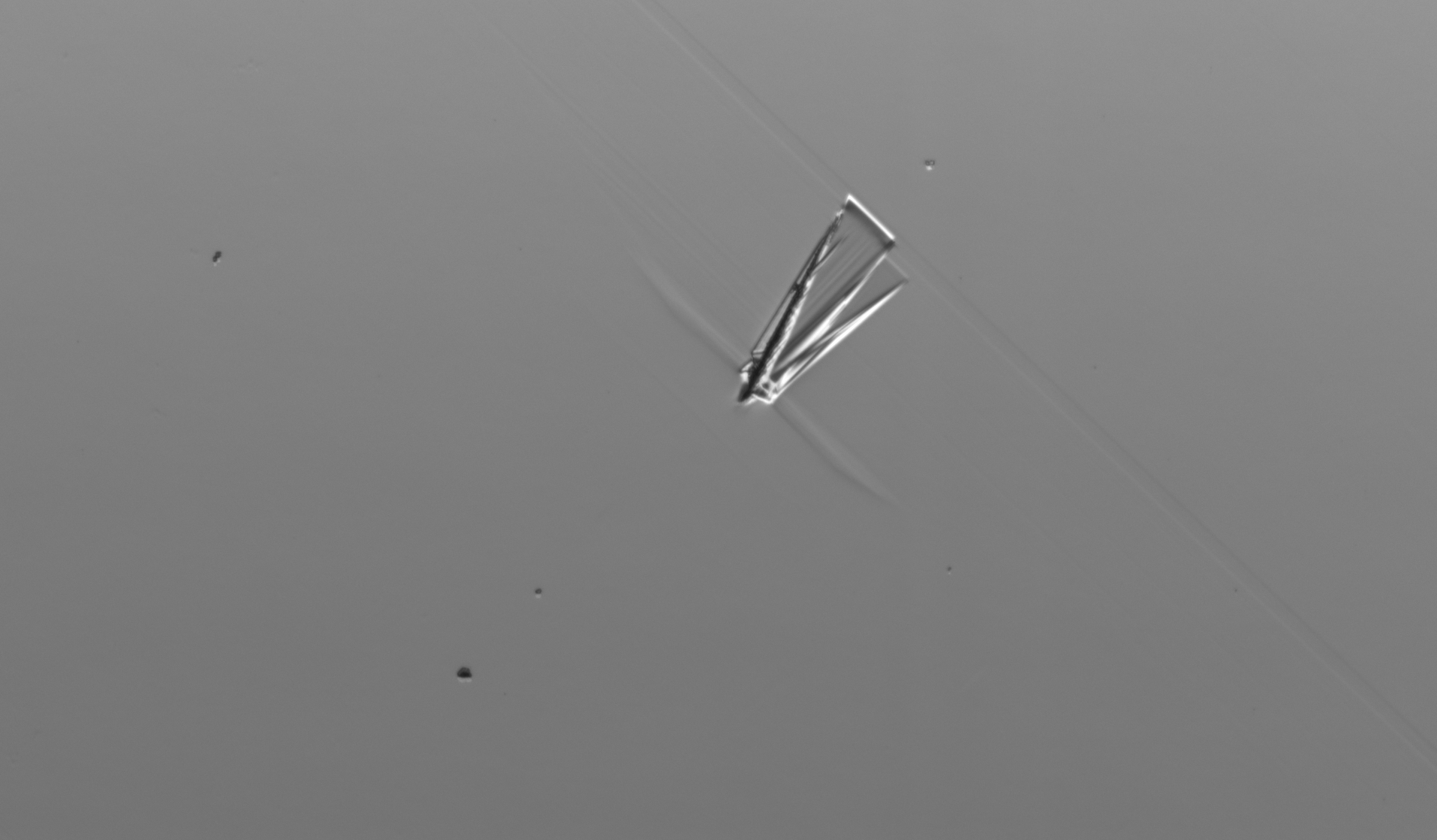
Figur 3-1:Exempel på halvledarinspektionsbild i DIC Brightfield-läge
● Mörkfälts- eller svagt ljusinsläpp (extremt svaga signaler)
Mörkfältsmetoder förlitar sig på svaga spridda signaler som kan vara flera storleksordningar under bakgrunden. Mörkfältsmetoder (DSNU) kan producera falskt ljusa mönster i mörka områden, vilket lätt kan klassificeras som defekter. Vid fotoluminescens- (PL) eller elektroluminescens- (EL) tester, där signaler bara kan bestå av tiotals elektroner, kan även små DSNU-rester dölja verkliga defekter.

Figur 3-2:Representativ mörkfältsbild av defektinspektion i halvledare
● Flerlägesinspektion (komplexa förhållanden)
Avancerade system kombinerar ofta flera våglängder, vinklar och linjehastigheter. DSNU- och PRNU-egenskaperna varierar dock mellan dessa lägen. Om korrigeringar inte kan anpassas dynamiskt minskar detektionsnoggrannheten avsevärt i vissa konfigurationer.
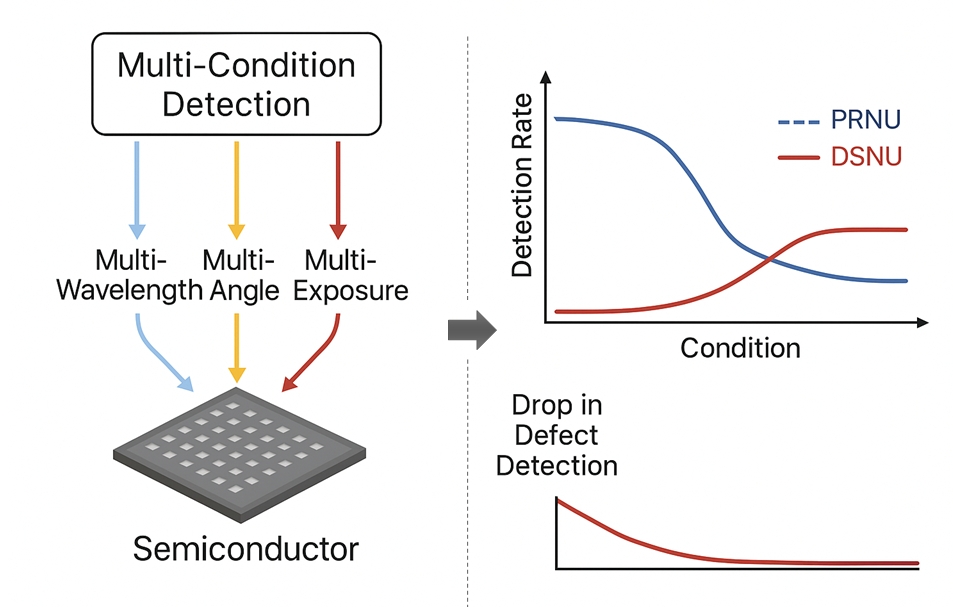
Figur 3-3:Schematisk illustration av smärtpunkter i ett halvledarsystem med flera villkor
Tucsens avancerade DSNU/PRNU-korrigeringsteknik
För att hantera dessa problemområden använder Tucsens TDI-kameror ett komplett DSNU/PRNU-dämpningssystem som kombinerar kylning, temperaturkontroll och högprecisionskalibrering. Detta säkerställer stabil och noggrann inspektion även vid långa driftstider, varierande lägen och svagt ljus.
1. Högpresterande kylning och temperaturkontroll
● Avancerade TEC-moduler minskar mörkerström och DSNU-baslinje kraftigt.
● Precisionstemperaturhantering håller temperaturen stabil inom ±0,5 °C, vilket förhindrar kalibreringsavvikelser under långvarig drift.
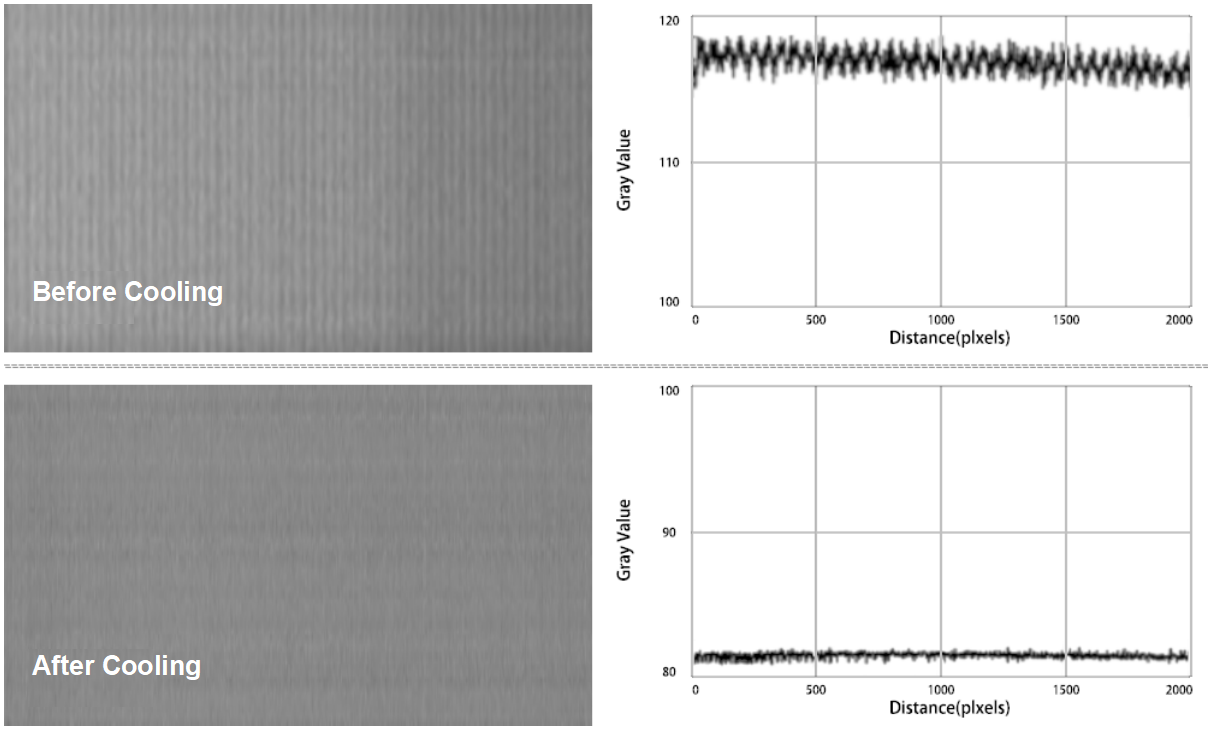
Figur 4-1:Jämförelse av bakgrundsuniformitet före och efter kylning för Tucsens TDI-kamera
2. Högprecisionskalibrering
● Lagrar och växlar mellan hundratals kalibreringsprofiler för att anpassa sig till lägen för flera våglängder, flera vinklar och flera frekvenser.
● Till exempel,Gemini 8K TDI scmos-kamerauppnår PRNU så lågt som 0,124 % och DSNU (10-bitars) på endast 5,8 e⁻, tillräckligt för att lösa defekter med <1 % kontrast.
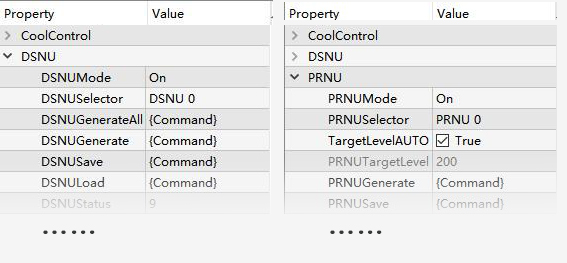
Figur 4-2:Användargränssnitt för PRNU/DSNU-korrigering i Tucsens TDI-kameraprogramvara
Utsikter: Från hjälpteknik till kärnteknik
I takt med att halvledartillverkningen går framåt har DSNU/PRNU-korrigering utvecklats från en stödjande funktion till en central möjliggörare av inspektionsnoggrannhet.
Tucsen Photonics fortsätter att investera i nästa generations korrigeringstekniker, med fokus på högre precision, intelligent anpassning och bredare applikationstäckning. Detta åtagande stöder både nationell självförsörjning och global konkurrenskraft inom halvledartillverkning.
Med den växande efterfrågan från AI, IoT och autonom körning kommer kraven på inspektionsnoggrannhet bara att öka ytterligare. Företag som behärskar grundläggande korrigeringstekniker kommer att ha fördelen att driva framsteg inom halvledarindustrin.
Kontakta oss
För detaljerade specifikationer, tillämpningsfall eller anpassade lösningar för Tucsens TDI-kameror, vänligen kontakta vårt tekniska team. Vi erbjuder fullständig support från lösningsdesign till integration i produktionslinjen.
Vill du veta mer? Ta en titt på relaterade artiklar:
TDI-kameror 101: Vad de är och hur de fungerar
Varför TDI-kamerateknik vinner mark inom industriell bildbehandling
Tucsen Photonics Co., Ltd. Med ensamrätt. Vänligen ange källan vid citering:www.tucsen.com








