
 13/05/2022
13/05/2022El ruido de lectura es la incertidumbre inherente a la medición electrónica del número de fotoelectrones que ha detectado la cámara. Normalmente se especifica enelectrones (e⁻ RMS)y depende de la velocidad de lectura, el modo de ganancia/ganancia de conversión, la configuración del ADC y la ROI, por lo que solo es comparable cuando las condiciones coinciden.
En escenas luminosas,ruido de disparoPor lo general, el ruido de lectura predomina y tiene poco impacto. En imágenes con poca luz (fluorescencia débil, astronomía, trabajos de alta velocidad con exposiciones cortas), el ruido de lectura puede limitar considerablemente la relación señal-ruido e incluso la detectabilidad.
Esta guía muestra cómo interpretar las especificaciones de ruido de lectura, cuándo es importante, qué ajustes lo modifican y cómo medirlo de forma fiable.
¿Qué es el ruido de lectura?
Ruido de lectura (a menudo llamadoruido de lectura) es la incertidumbre aleatoria introducida cuando una cámaraleeUna imagen se genera cuando la carga recolectada en cada píxel se convierte en un voltaje y luego se digitaliza en un número digital (DN). Incluso con una óptica perfecta y una escena estable, la electrónica de lectura nunca está completamente libre de ruido: los amplificadores, los circuitos de reinicio y muestreo, las rutas de señal analógica y el convertidor analógico-digital (ADC) pueden contribuir con pequeñas fluctuaciones. El resultado es un error aleatorio por píxel y por fotograma que se añade durante la lectura.

Figura 1: Imagen con ruido limitado de lectura
En este régimen de iluminación ultrabaja, los valores de la señal son comparables al ruido de lectura, lo que significa que el ruido de lectura es el principal factor limitante de la relación señal-ruido (SNR).
Porque el sensor en última instancia mide la luz comoelectronesEl ruido de lectura se especifica más comúnmente enelectrones (e⁻), típicamente comoe⁻ RMS. Expresar el ruido en electrones facilita la comparación del rendimiento entre configuraciones y modelos de cámara. (Si se parte de DN, la conversión a e⁻ requiere la ganancia de conversión del sistema,e⁻/DN.) En las cámaras científicas modernas, el ruido de lectura puede ser muy bajo, a menudo en elNivel RMS de ~1–3 e⁻ en modos de bajo ruido.para imágenes con poca luz, aunque el valor exacto depende de la velocidad de lectura, el modo de ganancia/ganancia de conversión, la configuración del ADC, la ROI y la temperatura.
Valores típicos y por qué varían
Para muchoscámaras sCMOSEl ruido de lectura se ha reducido lo suficiente como para que se puedan medir señales muy pequeñas con buena fidelidad. Otras tecnologías de sensores y modos de funcionamiento pueden presentar un mayor ruido de lectura, especialmente cuando se optimizan para la máxima velocidad de fotogramas. Consulte la Tabla 1 para ver algunos valores representativos. Por ello, es fundamental comparar el ruido de lectura únicamente en condiciones de prueba idénticas (modo, velocidad de lectura, ganancia, profundidad de bits, ROI, etc.).
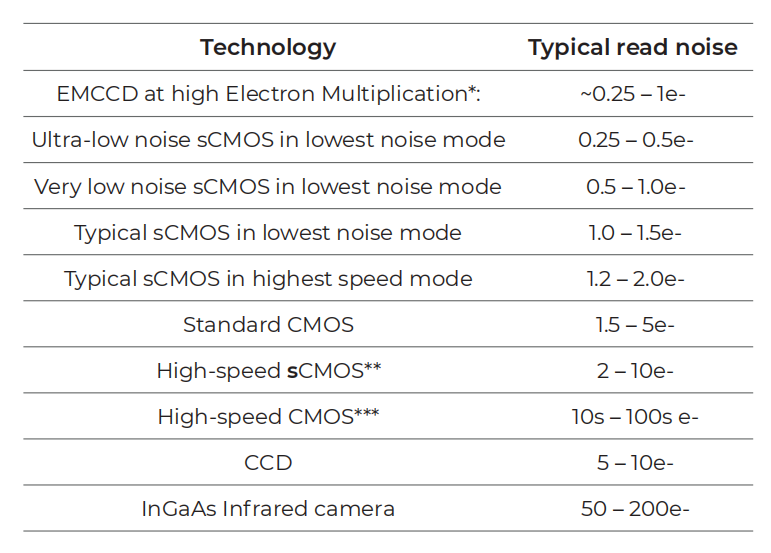
Tabla 1: Valores típicos de ruido de lectura RMS para diferentes tecnologías de cámaras científicas.
* Los EMCCD tienen fuentes de ruido adicionales que reducen su sensibilidad.
** sCMOS de alta velocidad como elCámara Tucsen Dhyana 2100 sCMOS
*** Alta velocidadcámaras CMOSSe utilizan tanto en imagen científica como en cine para la captura de movimiento a alta velocidad. Estas cámaras no suelen ser aptas para la captura de imágenes en condiciones de poca luz debido a su alto nivel de ruido, que enmascara las señales de baja luminosidad.
Ruido de lectura RMS frente a ruido de lectura medio (y por qué algunas hojas de datos muestran dos valores)
En los sensores CMOS/sCMOS, el ruido de lectura puede variar ligeramente de un píxel a otro, por lo que resulta útil considerarlo como una distribución en lugar de un valor único. Algunas cámaras también presentan una pequeña "cola" de píxeles con mayor ruido, donde efectos como el ruido telegráfico aleatorio (RTN) pueden ser más pronunciados.
Para resumir esta distribución, los fabricantes suelen indicar un valor de ruido de lectura medio (típico) y, en ocasiones, un valor RMS adicional más sensible a los píxeles con mayor ruido. Las definiciones pueden variar según el fabricante, por lo que lo más recomendable es consultar el método y las condiciones de medición indicadas, especialmente al comparar cámaras o seleccionar un modo para trabajar con poca luz.
¿Cómo leer las especificaciones de ruido de lectura?
El valor del ruido de lectura solo tiene sentido si se relaciona con el funcionamiento de la cámara durante la medición. El modo, la profundidad de bits, la velocidad de lectura, la ganancia (tanto de conversión como de conversión) y la región de interés (ROI) pueden modificar este valor; por lo tanto, siempre compare las especificaciones en condiciones similares.
Las condiciones de la prueba son importantes.
Un valor de ruido de lectura solo tiene sentido cuando está vinculado a lacondiciones de funcionamientoSe utiliza para medirlo. La misma cámara puede reportar valores diferentes según el modo de lectura y la configuración, por lo que un valor "menor" no es automáticamente "mejor" a menos que se comparen dispositivos idénticos. Antes de comparar cámaras, o incluso dos modos de la misma cámara, busque estas condiciones en la tabla de la hoja de datos, las notas al pie o los gráficos de rendimiento:
●Velocidad de lectura / frecuencia de píxeles (kHz–MHz):Una lectura más rápida suele aumentar el ruido de lectura.
Modo de ganancia/ganancia de conversión (por ejemplo, HCG/LCG): Cambia e⁻/DN y puede modificar el valor de ruido informado.
●Ruta del convertidor analógico-digital / profundidad de bits:Algunas cámaras ofrecen varios modos ADC que afectan al ruido y al comportamiento de cuantificación.
●ROI y canales de lectura:La región de interés (ROI) puede cambiar la forma en que se lee el sensor y puede alterar el rendimiento en algunas arquitecturas.
●Temperatura (si se indica):Las especificaciones suelen medirse a una temperatura definida del sensor; compare siempre en condiciones similares.
Si aparece una cifra de ruido de lectura en el titular sin contexto de modo/velocidad, considérela incompleta y busque la tabla o el gráfico detallado del modo.
Típico vs. Máximo / Mediana vs. RMS: por qué puede ver dos números
Debido a las arquitecturas de lectura paralela,La mayoría de los sensores CMOS/sCMOSSe observa cierta variación píxel a píxel en el ruido de lectura, por lo que puede ser útil considerar el ruido de lectura como una distribución en lugar de un valor único. Por eso, algunas hojas de especificaciones informan dos valores.
A medianaEl valor de ruido de lectura indica que el 50% de los píxeles están en o por debajo de esa cifra, lo que a menudo refleja un rendimiento "típico". Un valor adicionalRMSLa figura (cuando se proporciona) es más sensible a la dispersión de la distribución y puede capturar mejor la influencia de los píxeles con mayor ruido en la cola. Dado que las definiciones pueden variar según el fabricante, compruebe siempre las condiciones de medición y la convención de informes indicadas.
Los sensores CMOS/sCMOS pueden mostrarvariación píxel a píxelen el ruido de lectura, por lo que es mejor pensar en el ruido de lectura como undistribuciónen lugar de un solo valor. Para resumir esa distribución, los fabricantes pueden informar:
●Típico / Mediana:Una cifra de "píxel típico" que representa el rendimiento habitual en ese modo.
●RMS (o a veces una cifra más conservadora):Una estadística que puede ser más sensible a los píxeles con mayor ruido y que refleja mejor la dispersión general.
No todos los proveedores utilizan estos términos exactamente de la misma manera, así que siempre verifique la definición y el método de medición indicados. En caso de duda, compare las cámaras utilizando los valores informados en lamisma estadística y condiciones.
Ejemplos de modos de cámara (por qué una cámara tiene varias especificaciones de ruido de lectura)
Para concretar esto, considere lo siguiente:Cámara Tucson Aries 6510 con sensor sCMOS de máxima sensibilidad.En su hoja de datos, se informa sobre el ruido de lectura para múltiples modos de lectura, ya que la cámara puede funcionar con diferentes profundidades de bits y pipelines de lectura, y cada uno tiene un nivel de ruido diferente:

Figura 2: Ruido de lectura del Aries 6510
Cómo interpretar esto: estos números no son contradictorios, describendiferentes puntos de operaciónde la misma cámara. Un pipeline de mayor velocidad (en este caso, el modo Velocidad) normalmente prioriza el rendimiento y puede mostrar un mayor ruido de lectura, mientras que los pipelines optimizados para la sensibilidad pueden reducir el nivel de ruido de lectura. Es precisamente por eso que siempre se deben leer las especificaciones de ruido de lectura.junto con el nombre del modo y la profundidad de bits indicada. Al comparar cámaras (o comparar una cámara con un valor publicado), asegúrese de estar comparando lamismo modo, no solo la cifra más baja del titular.
¿Cuándo importa el ruido en la lectura de datos?
El ruido de lectura no limita todos los experimentos. Su importancia radica en una simple pregunta: ¿representa el ruido de lectura una parte significativa del ruido total disponible al nivel de señal con el que se trabaja? En condiciones de alta luminosidad, el ruido de fotones (ruido de disparo) suele ser el factor dominante. En condiciones de baja señal, el ruido de lectura puede convertirse en el factor determinante de la relación señal-ruido (SNR) y, en ocasiones, incluso de si se puede observar alguna estructura débil.
Ruido de lectura vs. ruido de disparo: una regla general rápida
El ruido de disparo aumenta con la señal a medida que√N(donde N es el número de fotoelectrones detectados). El ruido de lectura es aproximadamente unconstante por píxel por fotogramapara un modo determinado. Esto significa:
 ● Enalto N, √N es grande y el ruido de lectura contribuye poco.
● Enalto N, √N es grande y el ruido de lectura contribuye poco.
● Enbajo N, √N es pequeño y el ruido de lectura puede ser dominante.
Un punto de transición práctico es cuandoruido de disparo ≈ ruido de lectura, es decir cuando√N ≈ R. Eso corresponde aN ≈ R².
Por ejemplo, si un modo tieneR = 2 e⁻ RMS,El ruido de lectura se vuelve significativo cuando la señal es del orden de unos pocos electrones a unas pocas decenas de electrones por píxel (ya que R2=4). SiR = 10 e⁻, el punto de cruce se desplaza a alrededor de 102=100 electrones por píxel.
Un ejemplo concreto de relación señal/ruido (por qué es insignificante en escenas brillantes)
Supongamos que un píxel contiene2.000 e⁻de señal. El ruido de disparo es√2000 ≈ 44,7 e⁻.
Si el ruido de lectura es10 e⁻, el ruido total (RMS) es:

Así, la relación señal/ruido (SNR) cambia de 2000/44,7 ≈ 44,7 a 2000/45,8 ≈ 43,7, una diferencia pequeña. En otras palabras, a niveles de señal altos, reducir el ruido de lectura rara vez cambia lo que se puede ver.
En escenas de alta luminosidad, donde cada píxel capta miles de fotoelectrones, el ruido de lectura se convierte en un término pequeño dentro del presupuesto total de ruido. Por ejemplo, con una señal de 2000 e⁻, añadir 10 e⁻ de ruido de lectura modifica la relación señal-ruido (SNR) en tan solo un pequeño porcentaje —a menudo imperceptible—, mientras que con decenas de electrones por píxel, el ruido de lectura puede limitar considerablemente la SNR y el detalle visible.
Cuando el ruido de lectura se convierte en un verdadero factor limitante
El ruido de lectura es más importante cuando el experimento tiene una señal limitada por fotograma, lo que significa que cada píxel capta solo una pequeña cantidad de fotoelectrones en una sola exposición. En ese caso, el ruido de lectura puede dominar el presupuesto de ruido, reducir la relación señal-ruido y ocultar estructuras débiles.
Las indicaciones de aplicación comunes incluyen:
●Fluorescencia débil / baja densidad de marcajeespecialmente con exposiciones cortas o timelapse rápido
●Fluorescencia de molécula únicay superresolución basada en la localizacióndonde las señales pueden ser de tan solo unos pocos fotones por emisor por fotograma
●Imágenes de quimioluminiscenciadonde los presupuestos de fotones son inherentemente bajos y el ruido de lectura puede ser dominante
●Imágenes funcionales de alta velocidad (voltaje/potencial de membrana, imágenes rápidas de calcio)donde las exposiciones cortas reducen el número de fotones por fotograma.
●Flujos de trabajo de imagen con escasez de fotones(por ejemplo, fotogramas muy tenues incluso si planeas apilarlos/promediarlos posteriormente)
Como comprobación práctica: si su señal típica por píxel está en elcientos a miles de electronespor fotograma, el ruido de lectura rara vez es dominante. Si está en eldecenas de electrones o menosEl ruido de lectura y la elección del modo pueden influir notablemente en la calidad de la imagen.
Conclusión
El ruido de lectura es un parámetro dependiente del modo y limitado por la cadena de lectura; por lo tanto, las únicas comparaciones significativas se realizan en condiciones idénticas (modo, velocidad de lectura, ganancia/ganancia de conversión, ADC/profundidad de bits, ROI). En escenas brillantes, suele ser insignificante, pero en imágenes con baja señal puede limitar considerablemente la relación señal-ruido y la detectabilidad.
Si desea una recomendación para su experimento, comparta los detalles de su aplicación (nivel de señal, tiempo de exposición, velocidad de fotogramas, longitud de onda y relación señal/ruido objetivo). Nuestros especialistas en imágenes pueden sugerirle unaCámara de Tucsony el mejor modo de lectura para equilibrar la sensibilidad, la velocidad y el rango dinámico.








