
 2022年5月13日
2022年5月13日讀出雜訊是指電子測量相機偵測到的光電子數量時固有的不確定性。它通常在以下方面進行規定:電子數 (e⁻ RMS)並且取決於讀取速度、增益/轉換增益模式、ADC 配置和 ROI——因此只有在條件匹配時才具有可比性。
在明亮的場景中,散粒噪音通常情況下,讀出雜訊占主導地位,影響甚微。但在低光成像(例如弱螢光成像、天文觀測、短曝光高速成像)中,讀取雜訊會顯著降低訊號雜訊比,甚至影響偵測能力。
本指南展示如何解讀讀出噪音規格,何時需要關注,哪些設定會改變讀出噪聲,以及如何可靠地測量讀出噪聲。
什麼是讀出雜訊?
讀出雜訊(通常稱為)讀出噪音) 是相機引入的隨機不確定性。讀出來影像的產生過程是這樣的:將每個像素中收集的電荷轉換為電壓,然後數位化為數位值 (DN)。即使光學系統完美且場景穩定,讀出電路並非完全無雜訊:放大器、重設和取樣電路、類比訊號路徑以及類比數位轉換器 (ADC) 都可能引入微小的波動。最終導致讀出過程中每個像素、每幀都會產生隨機誤差。

圖 1:讀取雜訊限制影像
在這種超低光照條件下,訊號值與讀取雜訊相當,這意味著讀取雜訊是訊號雜訊比的主要限制因素。
因為感測器最終測量的是光。電子讀出雜訊最常在以下方面進行指定:電子(e⁻)通常作為e⁻ RMS以電子數表示雜訊可以更方便地比較不同相機設定和型號的性能。 (如果從DN值開始,轉換為e⁻需要係統轉換增益,e⁻/DN在現代科學相機中,讀出雜訊可以非常低——通常在低噪音模式下的 RMS 值約為 1–3 e⁻對於低光成像——儘管確切值取決於讀取速度、增益/轉換增益模式、ADC 配置、ROI 和溫度。
典型值及其變化原因
對許多人來說sCMOS相機目前,讀取雜訊已足夠低,可以高精度地測量極微弱的訊號。其他感測器技術和工作模式可能會出現更高的讀取噪聲,尤其是在針對最大幀速率進行最佳化時。表 1 列出了一些代表性數值。因此,必須在匹配的測試條件(模式、讀取速度、增益、位元深度、ROI 等)下比較讀取雜訊。
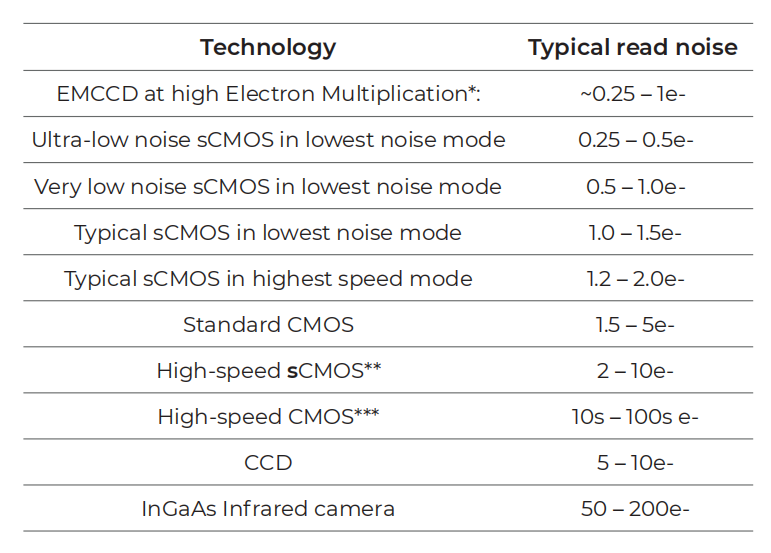
表 1:不同科學相機技術的典型 RMS 讀取雜訊值
EMCCD 存在額外的噪音源,會降低其靈敏度。
** 高速 sCMOS,例如Tucsen Dhyana 2100 sCMOS 相機
高速CMOS相機這些相機既可用於科學成像,也可用於高速運動捕捉電影拍攝。但由於其高雜訊會掩蓋低光照訊號,因此通常無法用於低光照成像。
均方根讀取雜訊與中位數讀取雜訊(以及為什麼有些資料手冊會顯示兩個數值)
在CMOS/sCMOS感測器中,讀取雜訊可能因像素而異,因此將讀取雜訊視為一個分佈而非單一值會更有幫助。某些相機也會出現一小段雜訊較高的像素“尾部”,在這些區域,隨機電報雜訊(RTN)等效應會更加明顯。
為了概括這種分佈情況,製造商可能會報告一個中位數(典型值)讀取雜訊值,有時還會提供一個對高雜訊像素更敏感的 RMS 值。不同製造商的定義可能有所不同,因此最穩健的方法是查看其規定的測量方法和條件——尤其是在比較相機或選擇低光照工作模式時。
如何解讀讀數雜訊規格?
讀出雜訊值只有在與測量期間相機的操作方式相關時才有意義。模式、位元深度、讀出速度、增益/轉換增益和ROI都會影響該數值-因此,請務必在相同條件下比較規格。
測試條件很重要
只有當讀出雜訊係數與以下因素相關聯時,它才有意義:運作條件用於測量。同一台相機在不同的讀取模式和配置下可能會報告不同的值,因此,除非您進行的是同類比較,「更低」並不一定意味著「更好」。在比較相機(甚至同一台相機的兩種模式)之前,請先在資料表、註腳或效能圖表中尋找以下條件:
●讀取速度/像素速率(kHz–MHz):更快的讀取速度通常會增加讀取雜訊。
增益/轉換增益模式(例如,HCG/LCG):改變 e⁻/DN,並可能改變報告的雜訊值。
●ADC路徑/位元深度:有些相機提供多種ADC模式,這些模式會影響雜訊和量化特性。
●投資報酬率和讀數管道:ROI 可以改變感測器的讀取方式,並可能改變某些架構的性能。
●溫度(如有註明):規格參數通常是在特定的感測器溫度下測量的;務必在相似條件下進行比較。
如果標題中的讀噪資料沒有模式/速度上下文,則將其視為不完整,並尋找詳細的模式表或圖表。
典型值與最大值/中位數與均方根值:為什麼你會看到兩個數字
由於採用了平行讀取架構,大多數CMOS/sCMOS感測器讀取雜訊存在像素間差異,因此將讀取雜訊視為分佈而不是單一數值會更有幫助。這就是為什麼有些規格表會給出兩個數值的原因。
A 中位數讀出雜訊值表示 50% 的像素值等於或低於該值,這通常反映了「典型」效能。此外,均方根值此圖(如有提供)對分佈的離散程度更為敏感,能夠更好地捕捉尾部高雜訊像素的影響。由於不同製造商的定義可能有所不同,請務必查看規定的測量條件和報告規範。
CMOS/sCMOS感測器可以顯示像素間的變化讀出噪聲,因此最好將讀出噪聲視為一種分配而不是單一數值。為了概括這種分佈情況,製造商可能會報告:
●典型值/中位數:代表該模式下常見效能的「典型像素」數值。
●RMS(或有時會採用較保守的數值):此統計量對雜訊較大的像素較為敏感,能較能反映整體分佈。
並非所有供應商都以完全相同的方式使用這些術語,因此請務必查看其規定的定義和測量方法。如有疑問,請使用根據以下規定報告的值來比較相機:相同的統計數據和條件.
相機模式範例(為什麼一台相機有多個讀出雜訊規格)
為了具體說明這一點,請考慮以下幾點:Tucsen Aries 6510 超高靈敏度 sCMOS 相機在其資料手冊中,報告了多種讀出模式下的讀出雜訊——因為相機可以在不同的位元深度和讀出管線下運行,而每種模式的雜訊基底都不同:

圖 2:Aries 6510 讀出噪聲
如何解讀:這些數字並不矛盾──它們描述的是…不同的工作點同一台相機。高速流水線(此處指“速度模式”)通常優先考慮吞吐量,可能會產生更高的讀出噪聲,而靈敏度優化的流水線則可以降低讀出噪聲底限。這正是為什麼讀出噪音規格必須始終仔細閱讀的原因。以及模式名稱和指定的位元深度在比較相機(或將相機與公佈的數值進行比較)時,請確保比較的是…相同模式不僅僅是最低的頭條數字。
何時讀數噪音才重要?
讀出雜訊並非限制所有實驗。它是否重要,歸根結底取決於一個簡單的問題:在您所處理的訊號強度下,讀出雜訊是否佔總雜訊預算的顯著比例?在明亮的條件下,光子(散粒)雜訊通常占主導地位。而在低訊號條件下,讀出雜訊可能成為決定訊號雜訊比的關鍵因素──有時甚至決定微弱結構是否能夠被觀測到。
讀出雜訊與散粒雜訊:一個簡單的判斷方法
隨著訊號增強,散粒雜訊也會增加。√N(其中 N 為檢測到的光電子數)。讀出雜訊大致為每幀每個像素的常數對於給定的模式。這意味著:
 ● 在高氮√N 很大,讀出雜訊的影響很小。
● 在高氮√N 很大,讀出雜訊的影響很小。
● 在低氮√N 很小,讀出雜訊可能占主導地位。
實際的交叉點是當散粒噪聲 ≈ 讀出噪聲即當√N ≈ R這對應於N ≈ R².
例如,如果一個模式有R = 2 e⁻ RMS,當訊號強度約為每個像素幾個電子到幾十個電子時,讀出雜訊就會變得顯著(因為 R)。2=4)。如果R = 10 e⁻交叉點轉移到每像素約 102=100 個電子。
一個具體的信噪比範例(為什麼在明亮場景中信噪比可以忽略不計)
假設一個像素包含2,000 e⁻訊號.散粒噪聲是√2000 ≈ 44.7 e⁻.
如果讀出雜訊是10 e⁻總雜訊(均方根值)為:

因此,訊號雜訊比從 2000/44.7≈44.7 變為 2000/45.8≈43.7——變化很小。換句話說,在高訊號電平下,降低讀出雜訊幾乎不會改變你所看到的結果。
在高光照場景中,每個像素收集數千個光電子,讀出雜訊在總雜訊預算中佔比很小。例如,在 2000 個電子訊號的情況下,增加 10 個電子的讀出雜訊只會使訊號雜訊比 (SNR) 變化幾個百分點——通常難以察覺——而當每個像素收集數十個電子時,讀出雜訊會顯著降低訊號雜訊比和可見細節。
當讀出雜訊成為真正的限制因素時
當實驗的單幀訊號強度受限時,讀出雜訊的影響最為顯著——這意味著每個像素在單次曝光中只能收集到少量光電子。在這種情況下,讀出雜訊會佔據雜訊預算的主導地位,降低訊號雜訊比,並掩蓋微弱的結構。
常見的應用程式提示包括:
●螢光弱/標記密度低尤其是在短曝光或快速縮時拍攝時。
●單分子螢光以及基於定位的超分辨率其中,訊號可能只是每個發射器每幀發出的幾個光子。
●化學發光成像其中光子預算本身就很低,讀出雜訊可能佔據主導地位。
●高速功能成像(電壓/膜電位、快速鈣成像)其中,短曝光時間會降低每個畫面的光子計數。
●光子匱乏成像工作流程(例如,即使您計劃稍後進行堆疊/平均處理,畫面也可能非常暗)
作為一種實際檢查方法:如果您的典型逐像素訊號處於數百至數千個電子在每幀影像中,讀出雜訊很少占主導地位。如果它在幾十個或更少的電子讀出雜訊和模式選擇會對影像品質產生重大影響。
結論
讀出雜訊是與模式相關且受讀出鏈限制的參數-因此,只有在匹配的條件下(模式、讀出速度、增益/轉換增益、ADC/位元深度、ROI)才能進行有意義的比較。在明亮場景中,讀出雜訊通常可以忽略不計,但在低訊號成像中,它會顯著降低訊號雜訊比和可偵測性。
如果您需要實驗方面的建議,請提供您的應用詳情(訊號強度、曝光時間、幀速率、波長和目標訊號雜訊比)。我們的成像專家可以為您提供建議。途勝相機以及在靈敏度、速度和動態範圍之間取得平衡的最佳讀取模式。








